baidu进阶训练笔记九20200727
文章目录
- 第五章 百度Apollo规划技术介绍(二)
- motion planning with environment-1
- Vehicle state and model
- Motion planning with vehicle models
- Describe the motion of bicycle model
- SL coordinate Frame and XY Coordinate Fram
- XY Frame to SL Frame
- motion planning with environment-2
- 龙格现象
- Bezier Spline
- 2DConstrained Smoothing Spline
- 一维平滑方法
- 建立平滑的坐标系
- 螺旋曲线
第五章 百度Apollo规划技术介绍(二)
motion planning with environment-1
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-2xVYjvpB-1595839029378)(C:\Users\xiaomeiyan\AppData\Roaming\Typora\typora-user-images\image-20200727154450553.png)]
Vehicle state and model
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-FoXykx8U-1595839029381)(C:\Users\xiaomeiyan\AppData\Roaming\Typora\typora-user-images\image-20200727154751465.png)]
对于汽车而言,质点模型是远远不够的,无人车是前轮转向的车,前后位置的变化是不一样的,那么怎么去描述这种不一样呢?首先从刚体角度考虑,二维平面里的刚体涉及到XY和θ,也就是以车后轴中心作为XY坐标原点时车身的朝向heading。因为无人车运动模型还多了一个转向的变量,多了一个自由度,刚体模型也不够。
Motion planning with vehicle models
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-B65aKrFr-1595839029384)(C:\Users\xiaomeiyan\AppData\Roaming\Typora\typora-user-images\image-20200727155018527.png)]
两个轮子在转动的时候是沿着同一个中心转动的
后轮的转向半径1/κ与方向盘转动角度ω满足以下关系,其中L为前轮中心和后轮中心的距离。κ=(tan(ω))/L
Describe the motion of bicycle model
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-zTLSky7o-1595839029387)(C:\Users\xiaomeiyan\AppData\Roaming\Typora\typora-user-images\image-20200727155233553.png)]
在实际的自行车运动模型中,后轴中心是沿着如上图所示的一条平滑的轨迹运行,该轨迹对应的曲率κ 表示调整方向盘的度数,如果为正,表示向左转,反之则向右转。
SL coordinate Frame and XY Coordinate Fram
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Gh45jY71-1595839029387)(C:\Users\xiaomeiyan\AppData\Roaming\Typora\typora-user-images\image-20200727155414212.png)]
S表示道路中心线的方向,L表示与道路中心线垂直的方向
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-S1Rh4e5u-1595839029388)(C:\Users\xiaomeiyan\AppData\Roaming\Typora\typora-user-images\image-20200727155545270.png)]
SL坐标系到XY坐标系的投影:之所以要投影到世界坐标系,是因为很多信息是全局的,例如红绿灯位置,参考的是XY世界坐标系。在给定SL坐标系时,每一个点的S坐标本身对应一个(x-r,y-r)坐标,根据该点的横向偏移距离,可以求出给定点在世界坐标系中的XY位置
XY Frame to SL Frame

XY坐标系到SL坐标系的投影:因为SL坐标系并不是唯一的,XY会在曲线上产生很多投影,投影点是经过XY坐标,且垂直于曲线的线段与曲线的交点
- 怎样找到一个mapping?
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-2wVCE4co-1595839029390)(C:\Users\xiaomeiyan\AppData\Roaming\Typora\typora-user-images\image-20200727160147676.png)]
判断有没有sign changes
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-xLVDxe8v-1595839029392)(C:\Users\xiaomeiyan\AppData\Roaming\Typora\typora-user-images\image-20200727160230663.png)]
SL to XY —> 判断障碍物之间的关系
超平面分割定理
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-I7CnD5vW-1595839029394)(C:\Users\xiaomeiyan\AppData\Roaming\Typora\typora-user-images\image-20200727160443571.png)]
降低维度判断是否相交
motion planning with environment-2
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-rqWX1BBb-1595839029395)(C:\Users\xiaomeiyan\AppData\Roaming\Typora\typora-user-images\image-20200727160903140.png)]
无限连续无限平滑,道路中心线要平滑(curvature要连续)
不能单独smooth一个curvature,要根据动力学模型做平滑
龙格现象
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-mQgISliE-1595839029397)(C:\Users\xiaomeiyan\AppData\Roaming\Typora\typora-user-images\image-20200727161228882.png)]
在轨迹上以等距离的方式随机选择一些点,然后用高阶多项插值的方式来近似表示轨迹,对多项式进行优化。但是高阶多项式不能用于平滑,因为高阶的多项式抖动太大,没有办法控制幅度
Bezier Spline
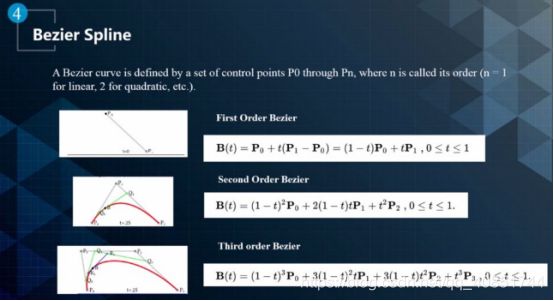
Bezier Spline 曲线是由一系列控制点定义的,例如P0 到 Pn,其中n代表曲线的阶数。如图所示,分别给出1阶、2 阶、3 阶 Bezier Spline 曲线的表示形式。通过对它们做平滑,得到平滑的曲线,例如二阶平滑保证曲线的曲率平滑。但是这种方法的缺点是,除了起始点和终点,其它控制点不能保证会被得到的曲线经过。
2DConstrained Smoothing Spline
抽象点、控制点、生成一条光滑曲线、满足约束条件
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-o21psBtM-1595839029398)(C:\Users\xiaomeiyan\AppData\Roaming\Typora\typora-user-images\image-20200727161528116.png)]
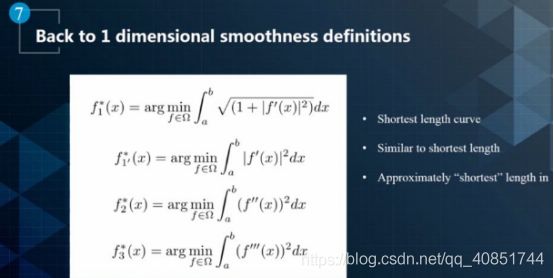
一维平滑方法
最短路径,但是路径最短还不能保证平滑性,因此会对其不同阶导数进行 Minimize 求解,保证导数空间的连续
- Smoothing Spline 的特殊的性质
- 在给定边界的条件下,它是一个多项式,可以找到最优解。前提是它的 Boundary Constraint 只考虑了起点和终点,如果中间有障碍物就不是最优解。这种情况下可以使用 Piecewise Polynomial(分段多项式)来处理。
- 一个 Piecewise Polynomial 是一维的函数,描述二维曲线是不够的,这时候就有一个 Spline 2D,假设我们把曲线分成 N 截,每节曲线段它的 X 坐标是一个 Polynomial ,Y 坐标也是一个 Polynomial 。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-X8D0bhXk-1595839029400)(C:\Users\xiaomeiyan\AppData\Roaming\Typora\typora-user-images\image-20200727162110860.png)]
建立平滑的坐标系

把曲线分为n节线段,每一节都是一个polynomial函数
怎么让曲线足够平滑?我们让它在 X 坐标上的变化率,也就是三阶导的平方是最小的,Y 上的变化率三阶导也是最小的,代价函数就是这两个变化率的和。代价函数的求解就是一个二次规划问题,我把这种 Loss Function 定义成这种形式是因为平方的积分能够给计算带来便利。
- 端点的约束条件要保证连接点之间,对x方向的导数和对y方向的导数都要是相等的,三阶导连续会带来很多好处,还要满足约束条件
螺旋曲线
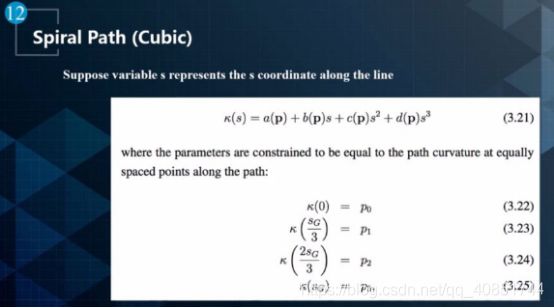
- 通过一个极坐标形式定义,比如说沿着一条曲线,如果一个点 S 的曲率是知道的,假设它的原点在 (0,0)的位置,可以唯一定义出一条经过 S 的曲线,也就是 Spiral Path 。那么可以让 Spiral Path 满足起点、终点约束条件生成一条螺旋曲线。
Spiral Path 和 Spline 2D 的区别呢?
- 任何的曲线在足够密的时候都可以用Piecewise Spiral path 或者是 Piecewise Polynomial 表示。
- 区别:出发点不一样
- Polynomial 计算很快很简单,Spline 2D 是一个凸空间里面生成一个 Spline 曲线。
- Spiral Path 是从 Configuration Space 出发。理论上来讲,螺旋曲线生成的线是要比 Spiral Path 更好处理,对一些极端情况处理更好。