Ubuntu18.04安装与使用ROS(Melodic)
Ubuntu18.04安装与使用ROS(Melodic)
- 安装ROS
- 配置初始环境
- 选择安装源
- 设置密钥
- 更新源地址
- 安装ROS(Melodic)完整版
- 初始化rosdep
- 环境配置
- 安装rosinstall
- 测试ROS
- 创建工作空间,运行第一个ROS程序
- 创建工作空间
- 设置环境变量
- 创建功能包
- 编译功能包
- 运行第一个Hello ROS程序
- CMakeLists.txt修改
- 编译工作区
- 设置环境变量
- 执行hello_ros程序
| ROS发布日期 | ROS版本 | 对应Ubuntu版本 |
|---|---|---|
| 2018.5 | ROS Melodic Morenia | Ubuntu 18.04/17.10 |
| 2016.3 | ROS Kinetic Kame | Ubuntu 16.04/15.10 |
| 2015.3 | ROS Jade Turtle | Ubuntu 15.04/14.10/14.04 |
| 2014.7 | ROS Indigo Igloo | Ubuntu 14.04/13.10 |
安装ROS
配置初始环境
在正式的安装前,先检查下Ubuntu初始环境是否配置正确。
打开 Ubuntu的设置 -> 软件与更新 -> Ubuntu软件 ->勾选universe , restricted , multiverse 三项。
如图所示:

选择安装源
sudo sh -c 'echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
设置密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
更新源地址
sudo apt-get update
安装ROS(Melodic)完整版
sudo apt-get install ros-melodic-desktop-full
注:如果遇到无法下载的情况,建议运行以下指令
sudo apt-get install ros-melodic-desktop-full --fix-missing
初始化rosdep
sudo rosdep init
rosdep update
注:这里可能会遇到错误情况,可以多试几次或者连接手机热点进行初始化
环境配置
添加到系统环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
立即更新
source ~/.bashrc
注:这里需要对应ROS的版本号
安装rosinstall
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
测试ROS
- 打开新的终端运行ROS
roscore
- 打开第二个终端,运行turtlesim功能包
rosrun turtlesim turtlesim_node
- 打开第三个终端,运行键盘控制,小键盘的方向可控制乌龟
rosrun turtlesim turtle_teleop_key
创建工作空间,运行第一个ROS程序
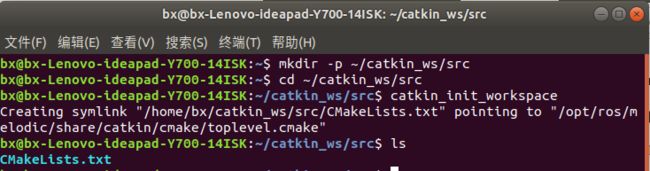
创建工作空间
创建工作空间catkin_ws,在空间内创建src文件夹放置功能包源码
mkdir -p ~/catkin_ws/src
进入到src文件夹目录下
cd ~/catkin_ws/src
初始化文件夹,生成CMakeLists.txt文件
catkin_init_workspace
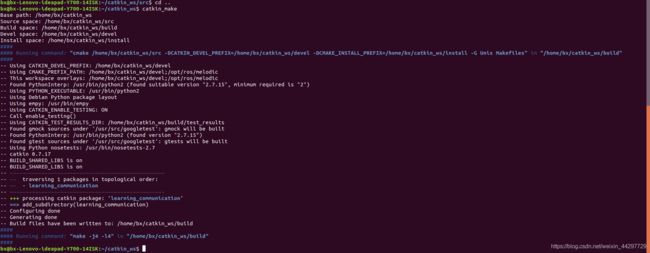
 编译工作空间
编译工作空间
catkin_make
注意是在~/catkin_ws目录下进行编译
设置环境变量
添加环境变量
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
让配置在当前终端立即生效
source ~/.bashrc
查看环境变量
echo $ROS_PACKAGE_PATH
终端输出的第一个是我们创建的catkin_ws
创建功能包
进入到src目录
cd ~/catkin_ws/src/
创建功能包
catkin_create_pkg learning_communication std_msgs roscpp rospy
std_msgs:包含常见消息类型
roscpp:使用C++实现ROS各种功能
rospy:使用python实现ROS各种功能
编译功能包
返回到catkin_ws目录下
cd ~/catkin_ws
编译
catkin_make
运行第一个Hello ROS程序
进入到~/catkin_ws/src目录
cd ~/catkin_ws/src
创建包
catkin_create_pkg hello.cpp
进入hello_ros包
创建并编辑hello.cpp文件
sudo gedit hello.cpp
复制以下代码:
#include  编辑hello_ros目录下的CMakeLists.txt文件
编辑hello_ros目录下的CMakeLists.txt文件
sudo gedit CMakeLists.txt
CMakeLists.txt修改
find_package(catkin REQUIRED )
修改为
find_package(catkin REQUIRED COMPONENTS roscpp)
将
include_directories(
# include
# ${catkin_INCLUDE_DIRS}
)
注释去掉
在下方添加:
add_executable(hello hello.cpp)
target_link_libraries(hello ${catkin_LIBRARIES})
保存退出
编译工作区
在 ~/catkin_ws目录下编译
catkin_make
 编译成功即可
编译成功即可
设置环境变量
source ~/catkin_ws/devel/setup.bash
执行hello_ros程序
打开新终端启动ROS
roscore
打开另外一个终端 运行hello_ros程序
rosrun hello_ros hello
