TwinCAT软件部分参数介绍
1.TwinCAT NC PTP的控制周期
通常说的NC周期,是指轨迹规划和PID运算的周期,是NC与伺服驱动器交换数据的周期,目标位置、当前位置、控制字、状态字都以这个频率更新。在TwinCAT System Manager中,叫做NC Task SAF任务周期,默认值为2ms。
另一个NC周期,是NC与PLC交换数据的周期,比如NC轴状态、当前位置、使能信号等等,都是以这个周期刷新的。在TwinCAT System Manager中,叫做NC Task SVB任务周期,默认值为10ms,与PLC程序中默认的任务周期一致。
2.TwinCAT NC PTP的配置、编程、调试
TwinCAT NC轴的配置包括:编码器(Enc)、驱动器(Drive)、 NC控制器(Ctrl)、与PLC的接口(Inputs和Outputs)。 Enc和Drive的配置决定了NC轴与哪个驱动器对应,而Inputs和Outputs 则决定它对应PLC程序中的哪一个轴结构型变量。Ctrl中的设置则决定了PID运算的模型和参数。

2.1 Enc编码器参数设置
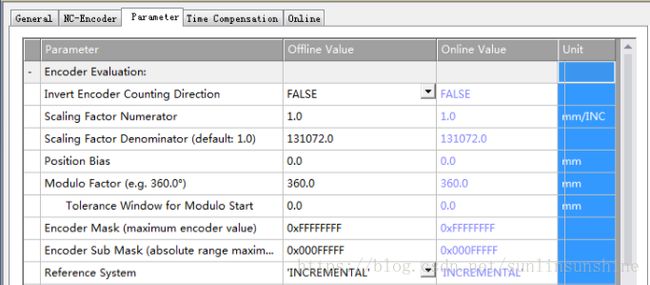
Encoder Evaluation
Invert Encoder Counting Direction:编码器计数方向取反,默认为False,如果希望电机正向转动的而位置反馈值减小,就需要置为True,同时也应将电机极性取反(Axis下Drive的Parameter页面Invert Motor Polority项)。
Scaling Factor Numerator:每个位置反馈的编码器脉冲对应的距离。比如:电机转动一圈1048576个脉冲,而电机转动一圈对应360mm,则Scaling Factor应为360/1048576=0.000343323 mm/Inc。
Scaling Factor Denominator:编码器反馈的脉冲数。
Position Bias:设备原点与编码器零位之间的偏移,机械安装固定后,此值就不变。当使用绝对编码器时,不需要每次寻参,就用这个偏移量来计算设备原点。因为多圈绝对编码器每次上电的位置是不变的,而单圈绝对编码器每次上电的位置是个Modulo值。
Modular Factor:模长。通常指一个工艺周期Axis运动的距离,默认值360。比如旋转主轴定位动作,当前位置30度,要定位到60度,电机可以正转30度,也可以正转390度,最终都是到达同一个点。如果不是定长内重复动作,可以忽略此参数。
Encoder Mask:编码器掩码,与位置变量的位数有关,通常都是32位,即最大是0xFFFFFFFF。
Encoder SubMask:编码器子掩码,与最大反馈值有关,比如16位的增量编码器,正向超过65535就会变0,这时候NC会处理过零问题,知道位置正在平稳增加,而不是真的有个位置突变。这时侯,SubMask就应该设置为0x0000FFFF。
Reference System:参考点坐标系。
Encoder Mask、 Encoder SubMask和Reference System三个参数结合,决定“位置反馈变量值转换成NC轴实际位置的规则”,而Scaling Factor则决定转换的比例。正常情况下,这3个参数都不用设置,选择好编码器的类型之后 NC 就已经确定了它们的值。
提示:当通过总线连接第三方伺服时,这3个参数必须手动输入,需要与驱动器内部的参数设置、接口变量类型等匹配。
Homing:
Invert Direction for Calibration Cam:是否往负方向运动,寻找原点。
Invert Direction for Sync Impuls Search:找到原点后,是否往负方向运动,寻找同步脉冲。
Calibration Value:参考点位置。通常这个值会在PLC程序里给定,此处设置与否不影响。
Reference Mode:寻参模式。

Other Settings:
Encoder Mode:编码器模式,有以下三种选项,
Pos:编码器只用于计算位置,当位置环在驱动器内时使用。
PosVelo:编码器只用于计算位置和速度,当位置环在 TwinCAT NC 时使用。
PosVeloAcc:TwinCAT NC使用编码器来确定位置、速度和加速度时选用。

2.2 Drive驱动器设置
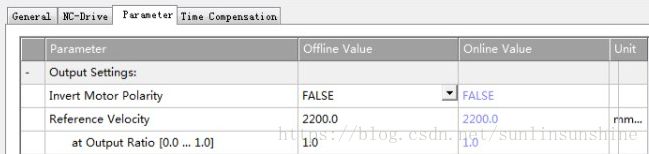
Output Scaling
Ivert Motor Polarity:电机极性取反。当给电机一个正的速度值,电机反向转动时,此值应为True。注意,同时也应将编码器方向取反(Axis下Enc的 Parameter页面Invert Encoder Counter Direction 项)。
Reference Velocity:参考速度,单位mm/s。当使用步进电机端子KL2531/2541和EL7031/7041、脉冲输出端子 KL/EL2521 以及模拟量输出端子控制伺服时,参考速度就是输出变量nDataOut为最大值(32767)时的电机速度。当使用总线通讯控制伺服驱动器时,参考速度没有实际意义,通常设置为电机的额定速度,设置的参考速度必须大于机械动作需要的最大速度。
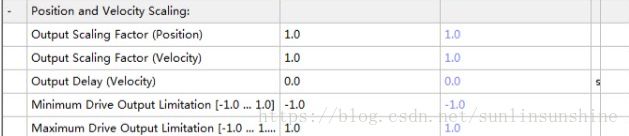
Output Scaling Factor(Velocity):速度输出系数。位置环在NC中完成时需要设置的比例。
Output Scaling Factor(Velocity) = SetVelo/ActVelo
2.3 Ctrl控制参数设置
先选择 NC 控制器的控制模型,针对不同的控制模型,有不同的参数项可供设置。

控制环的PID种类:
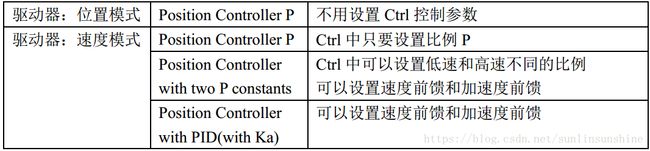
Position control :Proportional Factor Kv 比例增益

3.TwinCAT NC轴的调试
3.1 online调试界面

3.2 Function

点位运动中start mode中的几种模式:
Absolute:指定绝对位置和速度,相当于功能块MC_MoveAbsolute;
Relative:指定相对位置和速度,相当于功能块MC_MoveRelative;
Endless+和Endless-:指正向或者反向均速运动。相当于功能块 MC_MoveVelocity;
Modulo、 Modulo Shortest Way、 Modulo Minus、 Modulo Plus:在模长内定位。依次相当于功能块 MC_MoveModulo 的当前方向、最短路径、反方向、正方向动作到模长内指定位置。
Reversing sequence:以指定速度在两个绝对位置间往复运动,通常在调位置环时使用。
Velo Step Sequence:用于测试伺服轴在速度阶跃时的响应,通常在调速度环时使用。
- 脱离位置发生器,也没有PID调节的原始速度输出Raw Drive Output。
有两种模式:

Percent:直接输出 Reference 速度的百分比。
Veloctiy:速度单位是 mm/s。
- Set Actual Position
默认把当前位置设为 0,或者任意指定值。
寻参之前,可以凭观测手动设置当前位置。
详情请参考TwinCAT NC PTP实用教程(文中内容都是参考TwinCAT运动控制教程后觉得重要的地方)