计算机系统结构--复习(Part 2)
这是计算机系统结构复习内容的第二部分,第一部分请转链接:https://blog.csdn.net/zongza/article/details/83780572
往期回顾:
Part 1(chapter 1 - chapter 5):https://blog.csdn.net/zongza/article/details/83780572
Part 2(chapter 5 - chapter 10):https://blog.csdn.net/zongza/article/details/83933327
Part 3(概念专辑):https://blog.csdn.net/zongza/article/details/84100133
Part 4(习题专辑):https://blog.csdn.net/zongza/article/details/84111578
资料下载:
计算机体系结构-量化研究方法-Hennessy&Patterson著(英文版):https://download.csdn.net/download/zongza/10787837
计算机体系结构-量化研究方法-Hennessy&Patterson著(中文版):https://download.csdn.net/download/zongza/10787840
计算机系统结构教程-第二版-张晨曦著:https://download.csdn.net/download/zongza/10787843
计算机体系结构教程-学习指导与题解:https://download.csdn.net/download/zongza/10793886
Chapter 5 ILP - 2
nBranch Target Buffers 分支目标缓冲 *
nConcept and Advantages of Dynamic Scheduling * 动态调度
- qScoreboard 记分牌
- qTomasulo
- qSpeculation 前瞻执行
- qTomasulo with ReOrder Buffer 再定序缓冲
nSuperscalar and VLIW * 超标量与超长指令字
什么是动态调度?动态调度的好处?
动态是相对静态而言的,静态是指通过编译器(软件)进行调度,也就是在运行前进行调度,不可更改,动态调度是通过硬件实现在指令执行过程中的调度,同时还能保证data flow和exception behavior。
优点:
- 可以handle 静态调度时编译器检测不出来的相关(dependence),比如cache miss(软件方法检测不出来),在等调进cache的时候硬件调度可以使得处理器去执行别的指令。
- 一条指令的不同阶段可以在不同流水线中完成(尽管编译的时候他们是在同一条流水线中的)
关键思想:允许被stall的指令停顿期间执行后面的指令(顺序发射,乱序执行,乱序完成)
DIVD F0,F2,F4
ADDD F10,F0,F8
SUBD F12,F8,F14
比如:DIVD和ADDD之间有RAW,因此ADDD被stall,此时SUBD和两者不存在任何相关和冲突,因此硬件可以在ADDD的stall期间执行SUBD
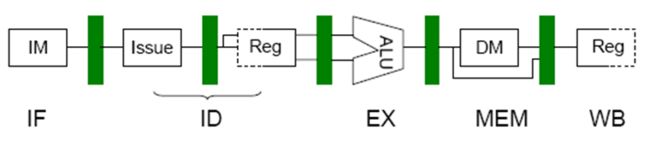
具体实现:将ID段拆成两个:Issure 和 Read operands,前者检测结构冲突,只要没有SH,该指令就能发射;后者检测数据冲突,等到没有DH就可以读操作数
但是,这种方式可能会带来WAR和WAW冲突:
DIVD F10,F0,F2
ADDD F10,F4,F6
SUBD F6,F8,F14
如果不对ADDD和SUBD使用寄存器重命名,那么因为SUBD和ADDD存在反相关(F6)如果流水线在ADDD读出F6之前就能完成SUBD,就回出现错误。类似的,DIVD和SDDD存在输出相关,流水线必须能检测出该相关,并避免WAW冲突。(可以用寄存器重命名解决)
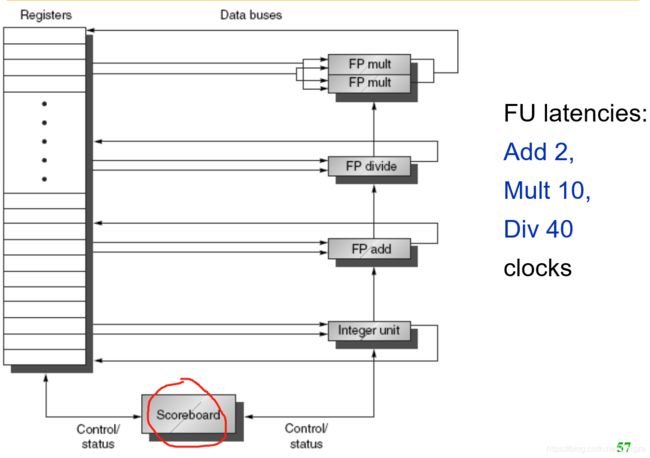
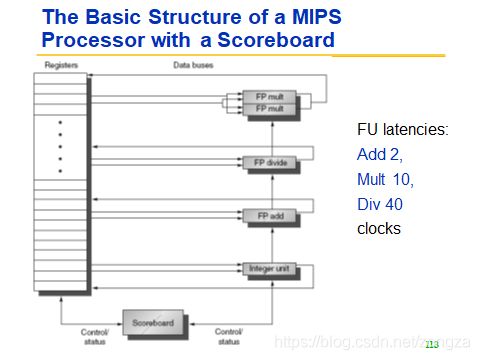
记分牌算法(scoreboard)
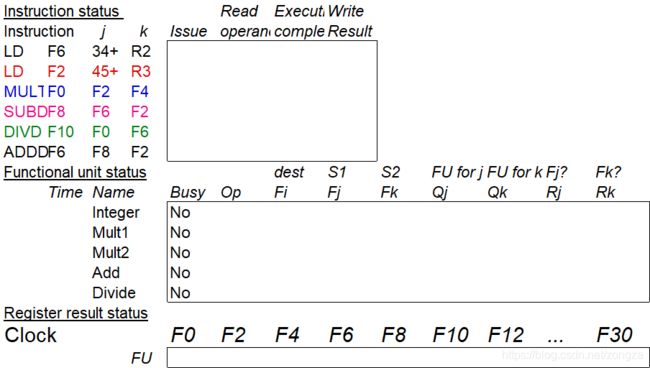
记分牌通过记录指令执行过程中指令的状态,运算部件的状态,寄存器的状态实现集中控制(centralized control),其中记分牌只记录四种指令状态:

记录的三种状态各自有一个表:如下所示
- 指令状态表特点:四个段 :发射 读取 执行 写回
- 功能部件状态表特点: 1+2+2+2
- 寄存器状态表特点:对应功能部件(一对一?)
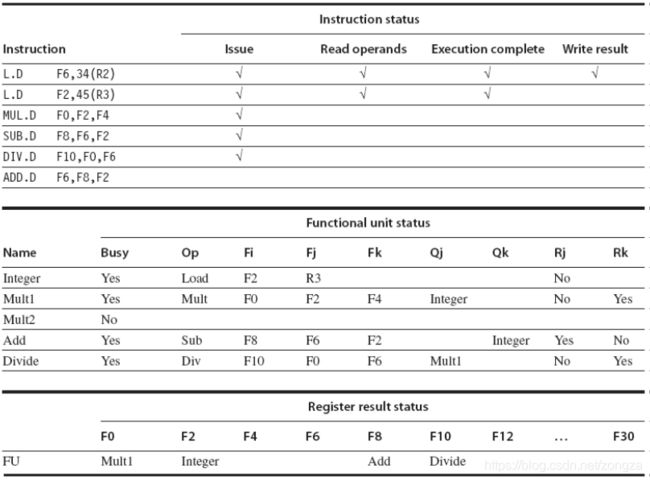
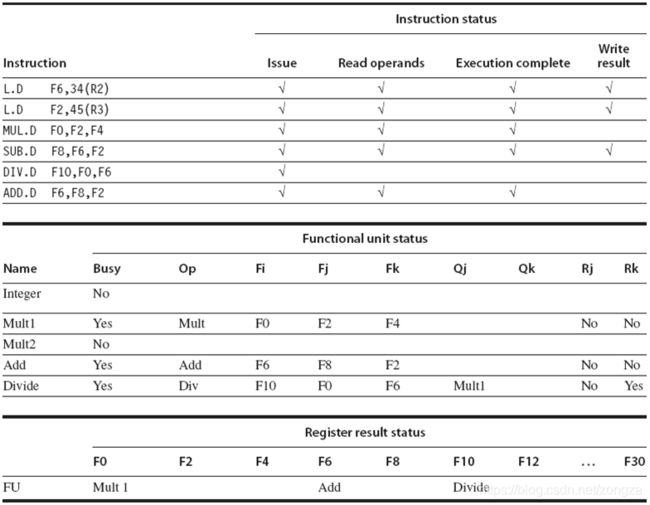
下图显示了第二条LD指令准备写结果之前的三表状态:
指令状态表:
- 此时LD2 处于EX阶段,由于MUL SUB 与LD2有数据相关(F2,RAW)所以两者都只能过issue(无结构冲突)不能进入Read。
- 由于MUL和DIV有数据相关(F0,RAW)所以DIV同理也只能在Issue阶段。
- ADD与SUB有结构冲突(争用加法器)所以连发射都不行。
功能单元状态表:
Fi 目的寄存器 Fj Fk 源寄存器 Qj Qk 源寄存器的来源(来自哪个功能部件) Rj Rk (yes表示就绪待取,no表示取完或者未就绪)
- Integer的Rj表示取完。
- Mult1的Rj表示没就绪,Rk表示就绪待取
寄存器状态表:
- 表示存到F0寄存器的结果来自功能部件Mult1
下图显示了MULT指令准备写结果之前的状态:
- 由于SUB和MUL不存在任何冲突和相关,且SUB 2cycles,MUL 10cycles 因此当MUL到了EX段,SUB一定执行完了
- MUL和DIV有RAW(F0),所以MUL没吧结果写到F0之前DIV只能处于Issue
- DIV和ADD有WAR(F6),所以DIV没读F6之前ADD必须阻塞在EX段
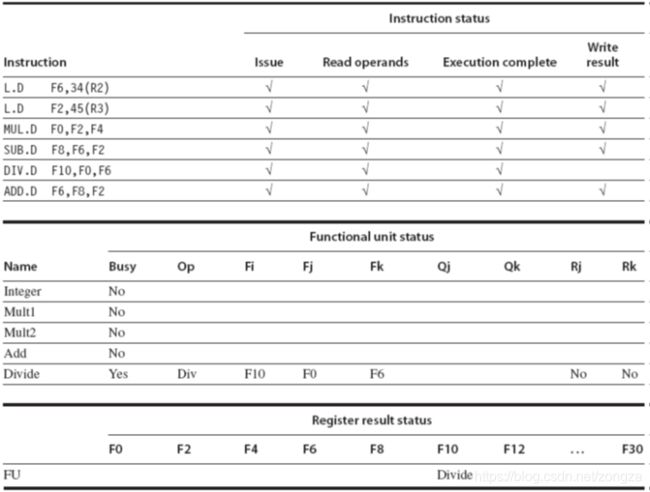
下图显示了DIV指令准备写结果之前的状态:
- DIV写结果前,前面的指令一定都完成了
- DIV要40个周期,ADD只要两个,因此当DIV取走F6后ADD立刻执行完全有足够的时间赶在DIV前面完成。
总结:

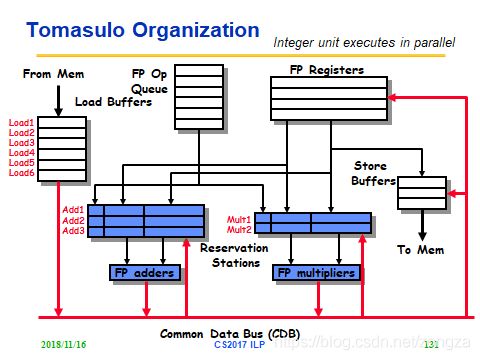
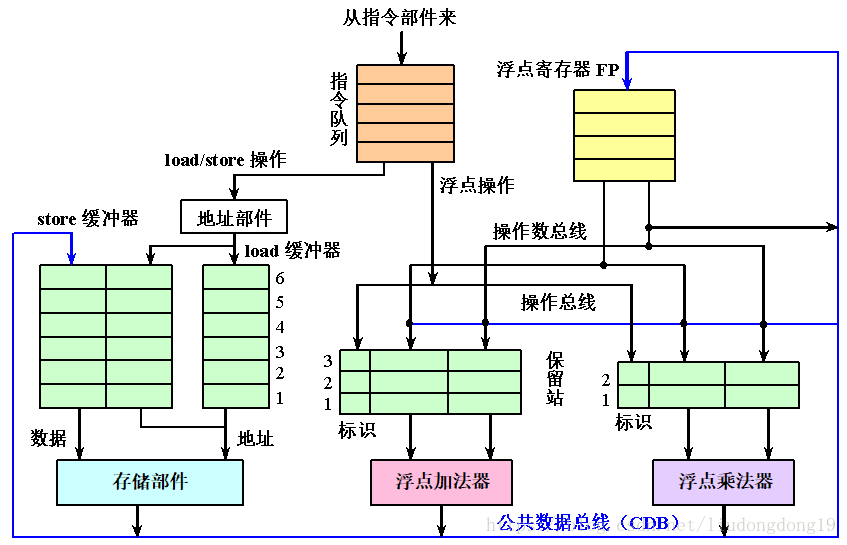
Tomasulo算法
主要思想:
- 将保留站作为虚拟寄存器存储 指令和操作数,实现分布式控制和缓存
- 记录和检测指令相关,功能单元直接从保留站获得操作数(不再从寄存器读),操作数一旦就绪就立即执行,减少RAW(因为读操作的源已被定向(预约)到写的指令,只有操作数就绪时读才执行);
- 通过寄存器换名来消除WAR冲突和WAW冲突。寄存器换名是通过保留站和流出逻辑来共同完成的。(之后的写操作对保留站中的指令不再有影响,因为已换名,也就是指令中寄存器号换成了产生这个操作数的保留站标识,操作数可从CDB得到,不用再从寄存器读)
记分牌和tomasulo比较:
可见:
- tomasulo的控制和缓存分布在各保留站中 而 记分牌中控制和缓存集中在记分牌
- 使用功能单元对操作数进行计算不再是从寄存器取数(记分牌),而是从保留站的操作数缓存中取数(因此减少RAW,从寄存器读可能遇到重名的寄存器导致RAW)
- 寄存器换名
优点:
- 冲突检测逻辑是分布的(通过保留站和CDB实现)
- 消除了WAR和WAW冲突
缺点:
- 实现复杂
- 需要大量的高速相联存储
- 性能受CDB影响大(解决:多CDB)
例题:
下面是采用DLX浮点部件的Tomasulo算法执行过程中用到的状态表,试填写状态表中的相关空白。 假定:浮点流水线的延迟如下:加法2个时钟周期,乘法10个时钟周期,除法40个时钟周期。给出SUBD 将要写结果时状态表的信息。只填写相关部分空格。
|
指令 |
指令状态表 |
||
| IS |
EX |
WR |
|
| LD F6,34(R2) |
√ |
√ |
√ |
| LD F2,45(R3) |
√ |
√ |
√ |
| MULTD FO,F2,F4 |
√ |
|
|
| SUBD F8,F6,F2 |
√ |
√ |
|
| DIVD F10,F0,F6 |
√ |
|
|
| ADDD F6,F8,F2 |
√ |
√ |
|
| 部件 名称 |
保留站 |
||||||
| Busy |
Op |
Vj |
Vk |
Qj |
Qk |
A |
|
| Load1 |
no |
|
|
|
|
|
|
| Load2 |
no |
|
|
|
|
|
|
| Add1 |
yes |
SUBD |
Mem[45+Regs[R3]] |
Mem[34+Regs[R2]] |
|
|
|
| Add2 |
yes |
ADDD |
|
Mem[45+Regs[R3]] |
Add1 |
|
|
| Add3 |
no |
|
|
|
|
|
|
| Mult1 |
yes |
MULTD |
Mem[45+Regs[R3]] |
Regs[4] |
|
|
|
| Mult2 |
yes |
DIVD |
|
Mem[34+Regs[R2]] |
Mult1 |
|
|
|
|
结果寄存器状态表 |
|||||||
| F0 |
F2 |
F4 |
F6 |
F8 |
F10 |
…… |
F30 |
|
| 部件名称 |
Mult1 |
|
|
Add2 |
Add1 |
Mult2 |
…… |
|
前瞻技术(speculation)
前瞻:循序处理器还未判断指令是否能执行之前就提前执行,以克服控制相关。他的实质是数据流执行:只要操作数就绪,指令就执行。
与流水线中的静态分支预测区别:前瞻技术是依靠硬件+动态分支预测技术+动态调度实现的。
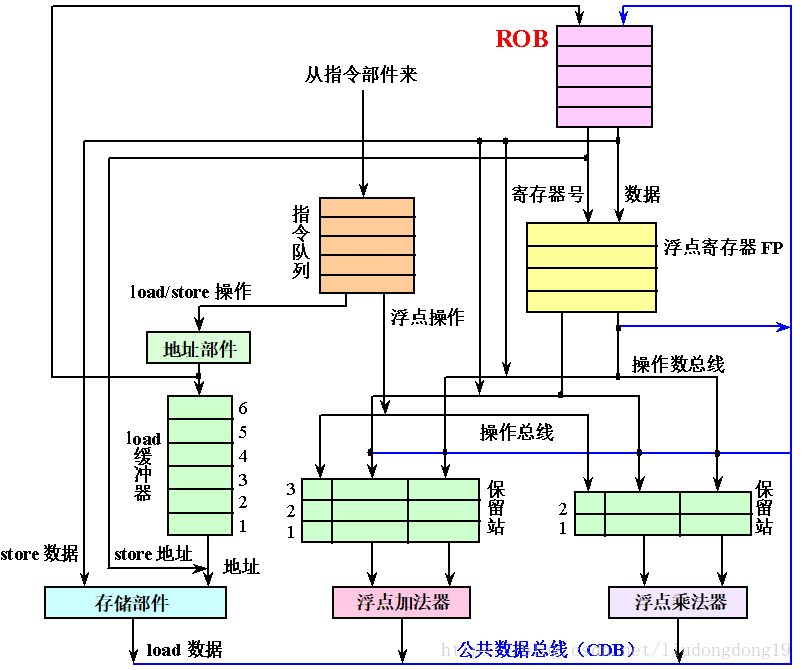
带有前瞻的tomasulo
前瞻是为了让动态调度算法更好地处理分支指令(有控制相关)。tomasulo的指令完成和写结果都在WR段,而在前瞻执行中加以区分,分成两个不同的段:写结果,指令确认,特点是:允许指令乱序执行,但是必须顺序确认(注意不是顺序完成,确认是顺序的,但是完成可以乱序)。
写结果段:前瞻执行的结果写到ROB,并通过CDB传递ROB中的结果到需要他们的指令保留站。
指令确认段:在分支结果出来后,对相应的前瞻执行结果予以确认,如果前瞻是对的,就把ROB中的结果写到寄存器或者存储器,如果是错的,就不予以确认并从那条分支指令的另一条路径重新开始执行。
ROB的每一项:
指令类型(指出该指令是分支指令、store指令或寄存器操作指令)+目标地址( 给出指令执行结果应写入的目标寄存器号(如果是 load和ALU指令)或存储器单元的地址(如果是store指令))+ 数据值字段(用来保存指令前瞻执行的结果,直到指令得到确认)+就绪字段( 指出指令是否已经完成执行并且数据已就绪)+控制字段(设置ROB的某一项是否被占用)
普通tomasulo和带有前瞻的tomasulo对比:
超标量和超长指令字
前面的方法可以提高并行度,但是CPI不可能低于1(最多就是1),想要在一个周期流出(发射)多条指令就得用多指令流出技术,包括超标量和超长指令字两种方法.
超标量和超长指令字都是指具有每个周期多指令流出能力的计算机。他们的区别在于调度方式(动态or静态)。.
静态调度超标量(顺序执行)
通过编译器进行调度+流出指令时用单独硬件检测冲突 == 静态调度+动态流出(所谓动态流出是指流出包中的指令可能不会全部流出,比如某指令与其他存在冲突,就只流出该指令之前的指令)
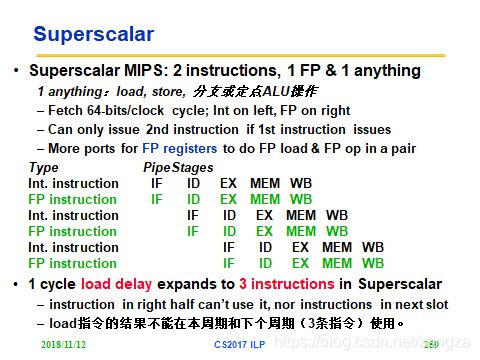
MIPS中的静态超标量实例:
这里是2-流出超标量,每个时钟周期流出1条整型指令和1条浮点指令(load store 分支看做整型)
- 优点:和任意2-流出相比,对硬件要求低(比如1整+1整,就需要两套整型的硬件)
- 缺点1:把load归为整型,如果load是浮点load,可能会和浮点操作并行流出导致浮点寄存器访问冲突
- 缺点2:load有一个时钟延迟,这使得使用load的结果的指令必须和load相隔至少一个周期(在有定向的情况下),因此load之后的三条指令都不能用其结果
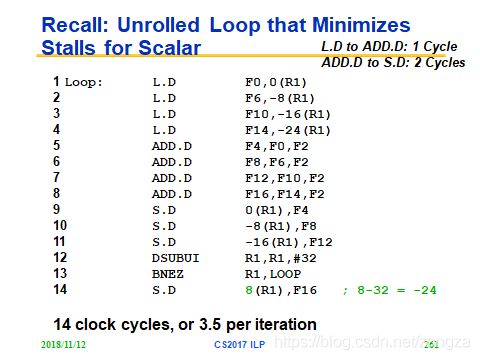
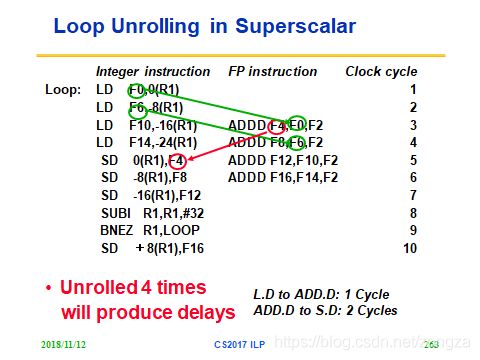
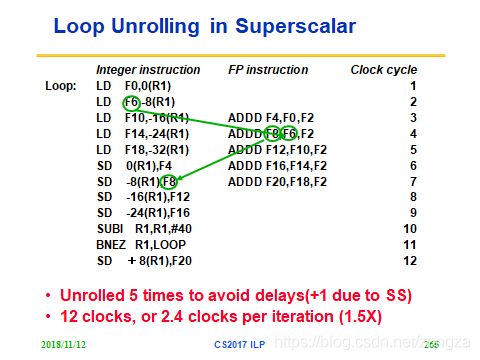
超标量中的循环展开:
需要考虑的问题:LD和ADD之间要有一个时钟的延迟,ADD和SD之间要有两个时钟的延迟
那么如果只展开四次ADD和SD的延迟不可避免,解决方法是进行更多的展开(5次)
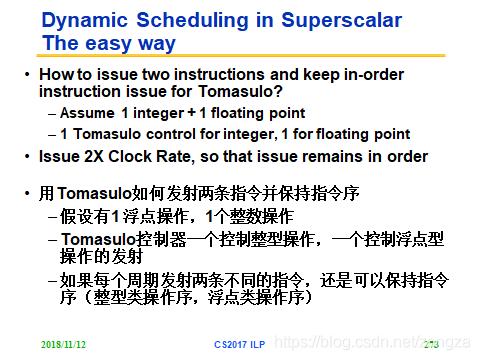
动态调度超标量(乱序执行)
通过硬件进行调度+两个tomasulo控制器(整型和浮点,确保不会乱序流出)== 动态调度+动态流出
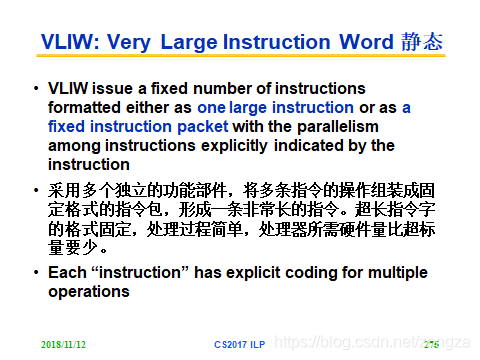
超长指令字
完全靠编译器进行调度 == 静态调度+静态流出(所谓静态流出是指每个时钟周期流出的指令数是固定的,这些指令构成一个长指令或指令包)
- 优点:对硬件依赖低,并行性完全由编译器挖掘。
- 缺点1:同一个指令包中的指令必须保证是不相关的。
- 缺点2:需要优秀的编译技术实现跨分支调度。
- 缺点3:没有冲突检测硬件,而是采用锁步机制(lockstep),某部件停顿整个处理机就停顿。
- 缺点4:操作槽不应定能被填满+为了提高并行性进行了过多循环展开,造成指令长度增加。
- 缺点5:机器代码不兼容。
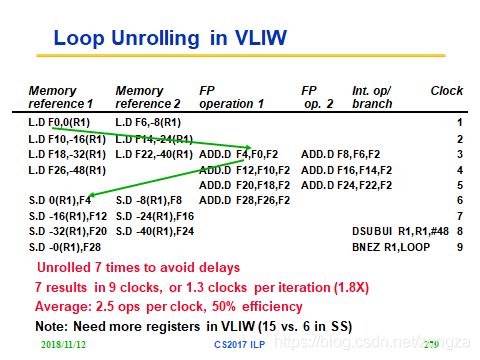
VLIW中的循环展开(指令包长度=2+2+1,注意其中某个指令槽不一定会被填满):
9 clocks/ 7 iterations = 1.3clock_per_interation
超标量和VILW比较(硬件和软件比较)
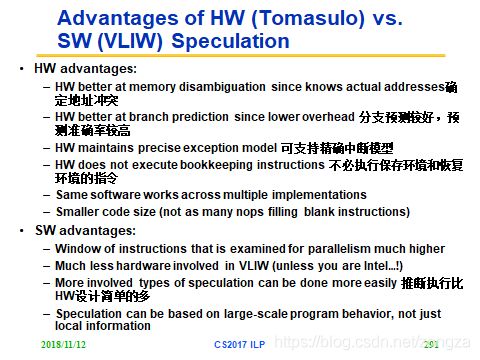
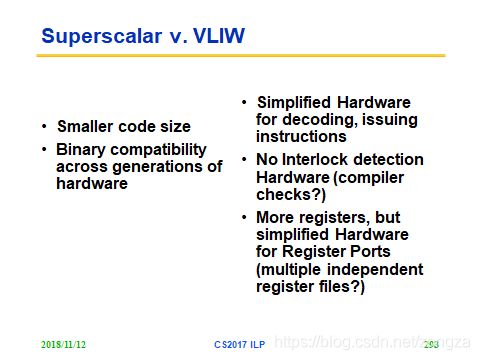
总结:
硬件的分支预测能力好,所需的代码少,但是需要大量的硬件
软件的推断设计简单,所需硬件少,但是代码量大
Chapter 6 Limits to ILP and SMT
nWhat are Limits to ILP
nWhat is instruction window? 指令窗口
nWhat is Thread Level Parallelism (TLP) or MultiThreading * 线程级并行,多线程
nWhat is Data Level Parallelism? 数据级并行
How to switch Multi Threads *
- qfine grain 细粒度切换
- qcoarse grain 粗粒度切换
nWhat is Simultaneous multithreading * 同时多线程
nKnow something about Power5
ILP的limit
- 功耗太高(提升ILP的方法会带来更多的功耗增加)
- 编译器的复杂度太高
- 硬件的复杂度太高
- 适合计算密集型任务,不适合数据密集型任务

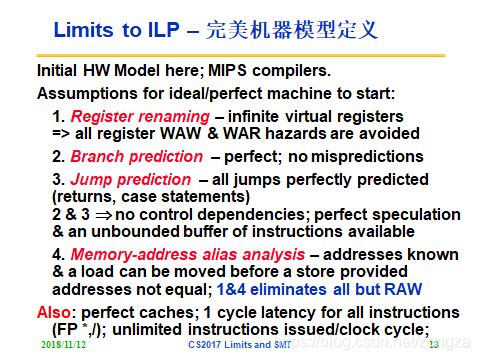
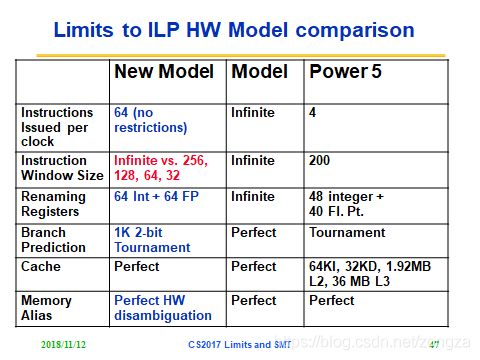
硬件完善度只要体现在以下四个方面:

指令窗口
指等待被检测是否能同时发射的指令总数,大小和检测冲突所需的代价有关(50个指令就需要2500次检测),也和cpu存储大小有关(窗口中的指令都是在处理器中)

什么是TLP?
线程:一个小型的进程,有自己的指令和数据,可以独立执行。线程可以是独立的部分也可以是并行程序中的一小段。
线程级并行是比指令级并行更高的层次,他可以显式地将几个线程并行执行(他们之间共享执行单元)。
什么是DLP?
数据级并行是比指令级并行更低的层次,他允许单一指令对多个操作数进行计算(SIMD)
我们考虑下面这个计算式子:(a+b)*(c+d)
该计算过程被分解为三步:
1. e = a +b
2. f = c +d
3. m = e * f早期的计算机一次只能处理一条指令,它要先算步骤1(加法操作),再算步骤2(加法操作),最后算3(乘法操作)。需要三步(花费三个指令)得到答案。
但是我们观察到:
3的结果依赖于1和2,而1和2都单纯的加法操作,所以开始想办法让1和2同时计算,那么CPU只要两步得到答案,步骤1和2一次算出来的结果,直接进行乘法运算。
它运用了SIMD(Single -Instruction ,Multple -Data)单指令多数据流技术。一个指令执行了(a,b,c,d) 4个操作数。SIMD指令集可以提供更快的图像,声音,视频数据等运行速度。
三种并行的比较:
指令级并行是一种隐式并行,也就是写程序的人不需要关注,通过流水线和超标量,使得一个程序的指令序列中有多条同时乱序运行,顺序提交。这依赖寄存器重命名,多个执行单元,重排序缓冲和指令预测技术。
线程级并行时一种显式并行,也就是程序员要写多线程程序。线程级并行主要指同时多线程(SMT)/超线程(HT)以及多核和多处理器。SMT是在指令级并行的基础上的扩展,可以在一个核上运行多个线程,多个线程共享执行单元,以便提高部件的利用率,提高吞吐量。SMT需要为每个线程单独保持状态,如程序计数器(PC),寄存器堆,重排序缓冲等。
数据级并行是一种显式并行,主要指单指令多数据(SIMD),比如a,b和c都是相同大小的数组,要进行的计算是a的每一个元素与b的响应元素进行运算,结果放入c的对应元素中。如果没有SIMD,就需要写一个循环执行多遍来完成,而SIMD中 一条指令就可以并行地执行运算。 线程的概念就是程序的执行序,每个执行序有执行上下文需要保存。
线程切换方式:
- 细粒度切换(every clock cycle):每条指令之间都可进行线程交换,因此线程之间是交替执行(常采用时间片轮转方法)
- 粗粒度切换(only on big stall):只在某个线程发生长stall(比如L2 cache不命中)时才进行线程交换

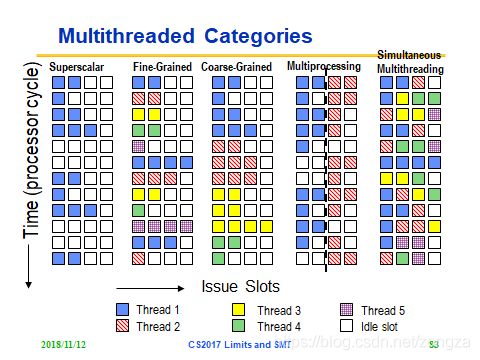
- 细粒度优点:1-CPU中可以同时执行多个线程的指令。2-能降低stall的发生概率(轮转时跳过处于停顿的线程)从而有效增加吞吐率
- 细粒度缺点:1-由于采用轮转(每周期切换另一个线程的指令),因此每个独立线程的执行就被减慢 2-每个周期都要切换,所以对线程切换速度要求高(一个周期内)
- 粗粒度优点:1-不会减慢独立线程的执行,因为只有独立线程发生大的stall才会切换线程。2-对切换线程的速度要求不高
- 粗粒度缺点:1-不能有效减少吞吐率,因为新线程的流水线建立需要时间开销(为啥细粒度不需要?因为细粒度的cpu可以执行多个线程的指令,也就是对他们一视同仁,粗粒度只能执行一个线程的指令,因此发生阻塞时必须排空或者暂停,阻塞后切换的新的线程在指令执行产生结果之前必须先填满整个流水线。所以粗粒度仅仅在pipeline refill << stall time的时候(也就是停顿时间远大于流水线建立时间)有效)
ILP和TLP的结合:SMT同时多线程
ILP的过程中很多功能单元处于闲置状态(由于stall或者相关)这时候就可以在闲置期开发TLP,具体来说就是把其他线程的指令看做不相关指令,并在stall期间执行。

硬件支持:
- 动态调度中由大量虚拟寄存器,可以用来保存线程的寄存器状态
- 动态调度中寄存器换名可以保证线程的数据通路互不干扰
- 额外硬件用来存储线程的状态(PC,重命名表)
SMT的缺点:
- 同时多线程中的TLP实现方式是细粒度切换,因此会影响单个线程的执行时间【解决:设置有限线程,减少对指定线程的性能影响】
- 需要很多的寄存器来保存多个线程的上下文状态
- 并发执行的多个线程可能会引起cache冲突,导致性能下降
- 如果ILP的多流出中每个时钟周期流出的指令过多,会使得时钟周期的开销变大(在issue那个时钟周期需要考虑发射那些指令,在completion段需要考虑提交那些指令,这些都要花时间)
Chapter 7 Memory Hierarchy - 1
nLevels of the Memory Hierarchy * 存储系统的层次结构
nThe Principle of Locality: Temporal Locality and Spatial Locality * 局部性原理
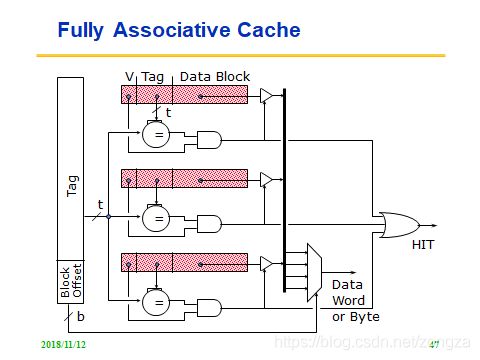
nWhere can a block be placed: Fully associative, direct mapped, n-way set associative * 映像规则
nHow is a block found in the upper level? 查找算法
nWhich block should be replaced on a miss? 替换算法:Random、LRU、FIFO
nWrite Policy: Write-Through and Write-Back; Write allocate and No-write allocate * 写策略:写直达与写回,按写分配与不按写分配
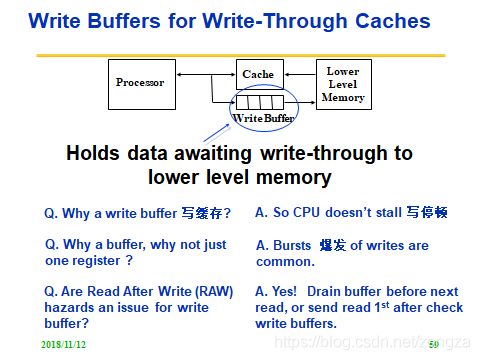
nWhat and Why a write buffer 写缓存
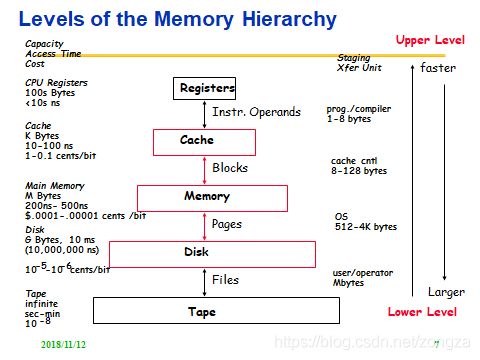
存储器系统层次结构:
80年代CPU速度提升很快而DRAM的速度相对发展缓慢,因此处理器和存储器之间的速度gap越来越大。
为了解决这个问题就有了cache,他作为存储器的一个缩放,工作在CPU和存储器之间,使得程序可以像访问寄存器一样快速访问cache,缓解CPU和DRAM速度差异。
常见的五级存储结构:
寄存器-> cache -> memory(主存) -> disk(辅存) -> tape
局部性原理:
局部性原理是程序能进行随机性访问的基础
时间局部性:当前某项被访问,那么近期他可能还会被访问
空间局部性:当前某项被访问,那么他附近的项也可能被访问
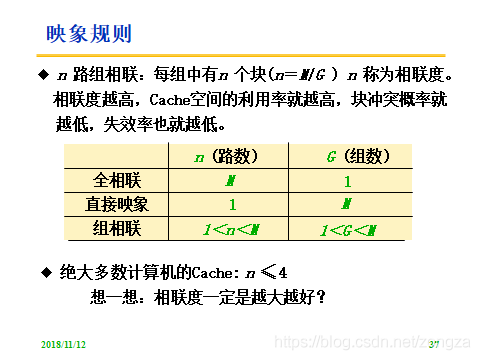
映像规则:组固定,组内不固定
- 全相联映射(组数:1):主存中的块可以映射到cache中任意位置,空间利用率高,冲突概率低,实现复杂
- 直接映射(组数:m):映射到固定位置(k mod 组数),空间利用率低,冲突概率高,实现简单
- n块组相连映射(组数:m/n):映射到固定的组(k mod 组数),组内位置任意(n表示组内块数是n),折中



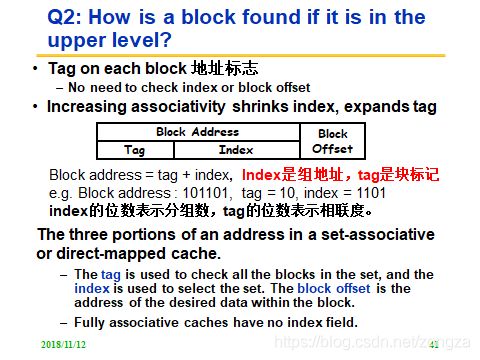
查找算法:
如何确定Cache中是否有所要访问的块?
答案:查找目录表!


替换算法:
- 对于直接映射:不需要替换算法(位置唯一,缺失必须替换对应位置的页)
- 对于全相连和n块组相连:随机,LRU,先入先出
写策略:
CPU和cache的交互如下所示:
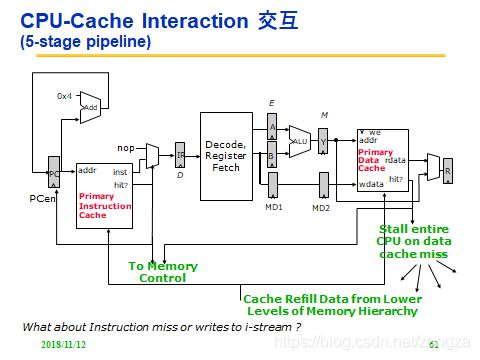
可知写操作必须在确认是命中后才可进行,因此将写策略分成两部分讨论:
当write miss时(要写的部分不再data cache里):
- write allocate :先把缺失单元调入cache,再写入(read miss 的处理和他一样)
- no-write allocate :直接在memory中写入,不调入cache了
当write hit时:
- write-through:cache和mem都写
- write-back:只写cache,等该单元被替换回mem的时候再写mem
常用组合:
- write-through + no-write allocate
- write-back + write allocate
写缓存:
写直达中因为要同时写cache和主存因此有了写缓存,减少CPU停顿
Chapter 7 Memory Hierarchy - 2
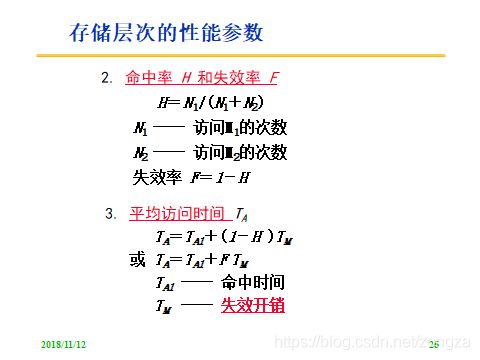
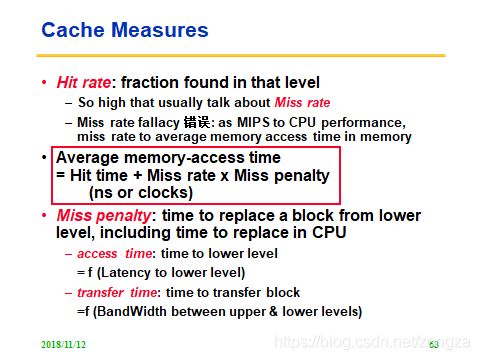
nCache Measures: Average memory-access time ** Cache性能:平均访问时间,命中与失效
- q= Hit time + Miss rate x Miss penalty *
- q= Hit timeL1+ Miss rateL1x (Hit timeL2+ Miss rateL2x Miss penaltyL2)
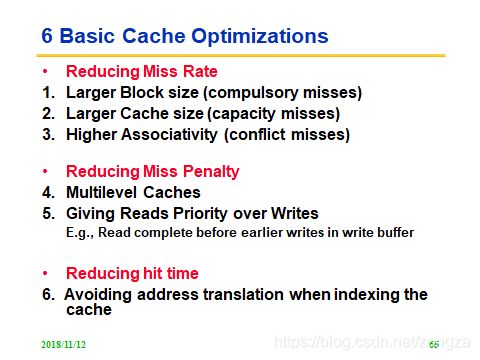
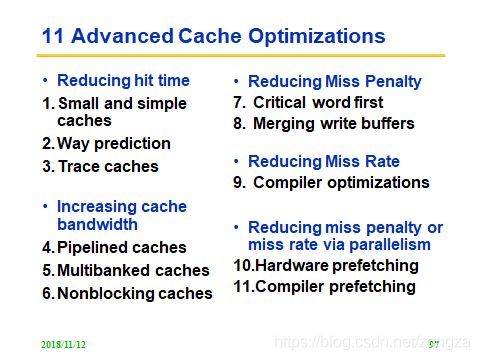
nBasic Cache Optimizations
nThree Major Categories of Cache Misses: Compulsory, Capacity and Conflict * 强制、容量与冲突不命中
nWhat is virtual address space 虚存空间
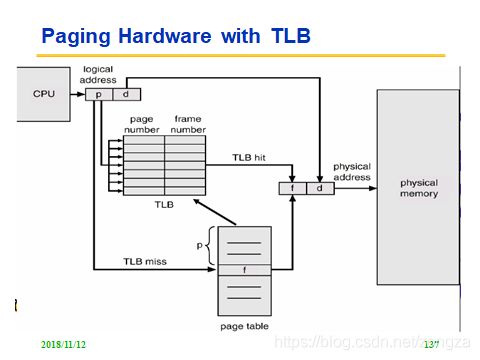
nHow page table works 页表
nTranslation Look-Aside Buffer (TLB)地址变换后备缓存
cache 性能:
- 平均访问时间= Hit time + Miss rate x Miss penalty *
- 平均访问时间= Hit timeL1+ Miss rateL1x (Hit timeL2+ Miss rateL2x Miss penaltyL2)
cache优化策略:
cache优化从平均访问时间公式中的的三个要素入手
- 降低缺失率(提高block size)
- 降低缺失开销
- 降低命中时间

造成cache缺失的原因:
- 强制:首次访问失效(某块的第一次访问时cache一定miss)
- 容量:cache容量不够
- 冲突不命中:组相连和直接映射中的cache组满了,造成碰撞失效(这里也属于容量不足,组内容量,上一个是整体容量)
辅存对应的虚存和主存中的页表:
虚存定义:由主存和辅存构成,通过必须的软件(页表)和硬件(地址转换)支持,使得cpu访问的存储器可以有主存的速度和辅存的容量。
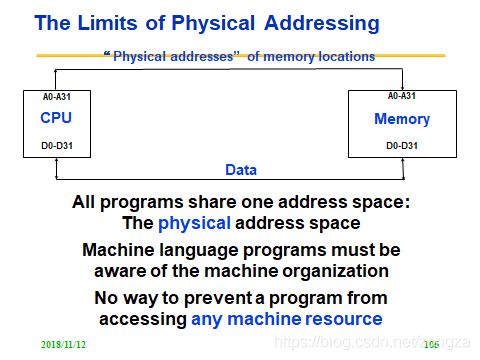

虚存的三个优点:
- 通过访问权限管理来保护数据
- 虚拟地址连续,方便编程
- 用户共享物理地址(但是有不同的虚拟地址),使得多线程成为可能

其中sharing指 :每个用户有一个页表 ,每一个用户页在页表中有一行,操作系统确保不同的页表不交叠(如下所示)

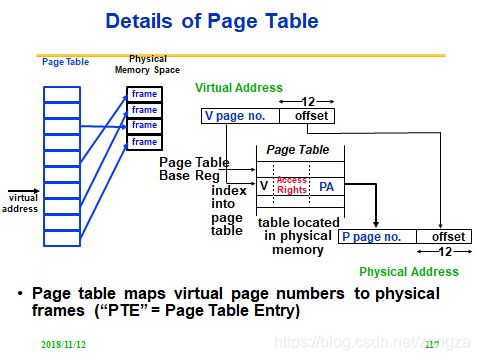
有关页表计算:
32位虚地址空间(按照字节寻址),每页4KB,页表每项4字节(32bit),页表大小是?
Given a 32-bit virtual address,4 KB pages, and 4 bytes per Page Table Entry (PTE), the size of the page table would be ?
首先页表有 2^32B / 2^12B 个项,每项大小是4B(4B的PTE),所以页表总大小为两者积=4MB。
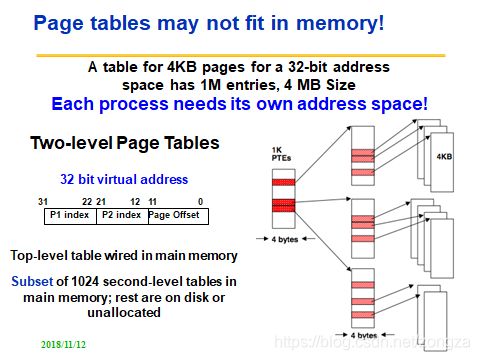
每个进程都要有自己的页表,每个页表要4MB,页表可能太多无法装入内存(页表存在内存中 ),所以有了二级页表:
一级页表索引了1K(1024)个二级页表,他们都在主存中,后面白的对应辅存中的实际块。
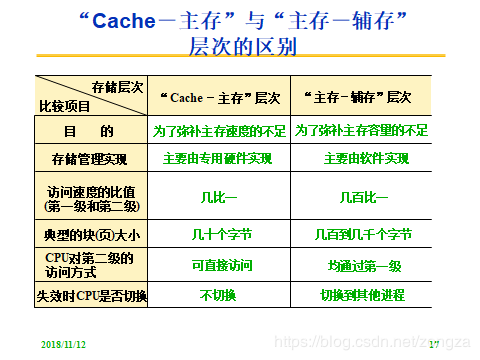
cache和虚存的区别:
- cache缺失靠硬件弥补 , 虚存缺失靠软件(操作系统)
- 指令中的地址长度决定了虚存大小,cache大小与之没有关系
- cache是为了缓解CPU和主存之间的速度问题,虚存是为了缓解主存容量不足问题
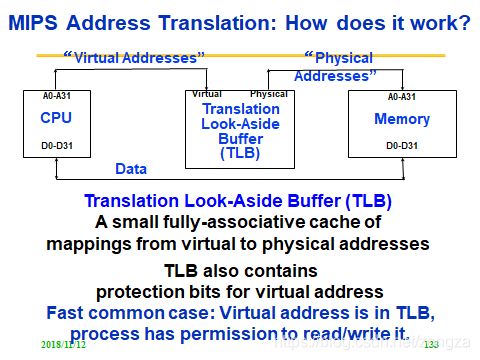
TLB地址变换缓存
目的:减少地址变换的时间(页表在主存,每次data/instruction都要两次访问内存,一次查页表一次取d/i,时间长)
TLB相当于一个全相连的cache,CPU直接查TLB,比查页表快得多
为什么主存可以有虚地址,cache不能用虚地址?
会有同义字问题:如果两个虚地址指向同一个实地址,那么cache中会有两个相同的块,浪费资源的同时也很难维持数据一致性

cache例题
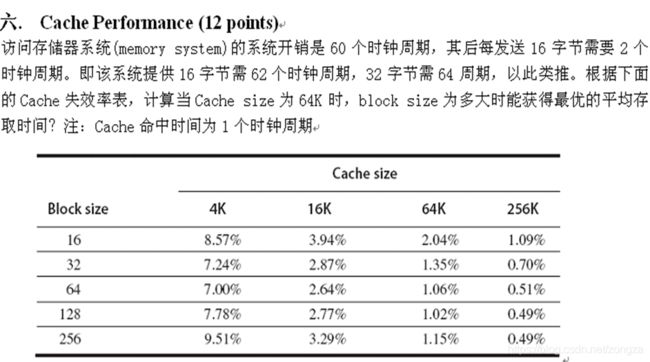
以Bs=16为例:64k的cache 缺失率为2.04%,所以命中率为1-2.04%
平均存取时间 = hit_time + miss_rate*(miss_pernalty) = 1+ 2.04%*(62)
如果Bs = 32:
平均存取时间 = hit_time + miss_rate*(miss_pernalty) = 1+ 1.35%*(64)
Chapter 8 I/O Systems
nWhat is a bus? Types of Buses
nDisk Drive Performance
nReliability, Availability and Dependability of the Storage Device * 可靠性、可用性与可信性
- qMTTF, MTTR and MTBF
nRedundant Arrays of Inexpensive Disks (RAID): Type, Characteristics and Read/Write Algorithm ** 廉价磁盘冗余阵列
nI/O Benchmarks: Metrics and TPC
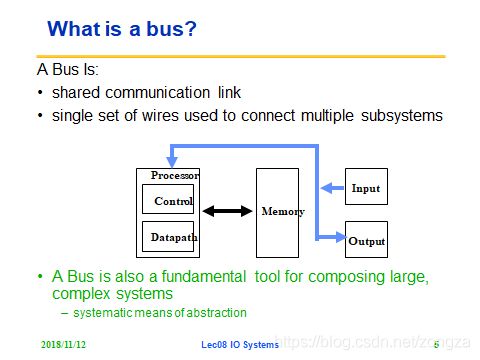
总线
总线就是共享的通信链路,连接多个子系统
存储器的性能
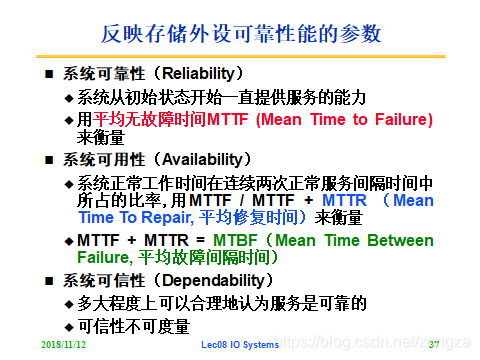
- 平均失效时间MTTF---可靠性 mean time to failure
- 平均恢复时间MTTR---可用性 mean time to repair
- 平均故障间隔时间MTBF---可用性 = MTTR+MTTF mean time between failure
硬盘驱动器的性能
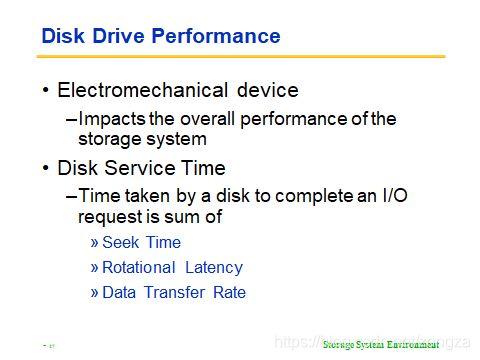
服务时间 = 找道时间+旋转时间+数据传输时间
RAID(Redundant Arrays of (Inexpensive) Disks)
基本思想:将多个容量较小、相对廉价的磁盘进行有机组合,从而以较低的成本获得与昂贵大容量磁盘相当的容量、性能、可靠性。
这种disk array的思想可以明显提高存储容量以及IO率,但是可靠性大大降低(反映在MTTF低),如下图所示:
70个IBM3.5虽然获得了9倍于3390k的容量和6倍的IO率,但是MTTF却从6年降低到1个月(new_MTTF=6年/70盘)
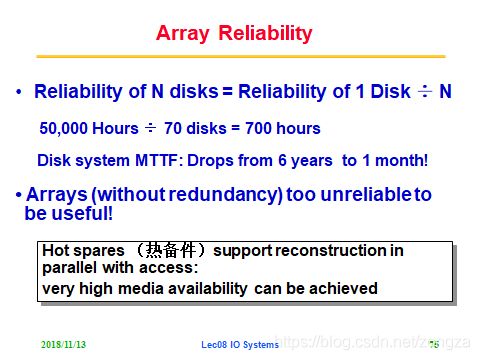
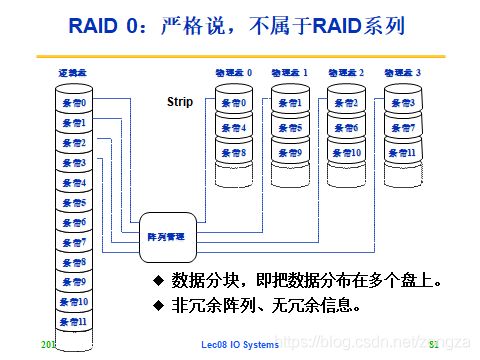
解决方法:数据被视为由多个条带组成(如下下图RAID 0 所示),这些条带分布存储在不同disk,因此可以利用冗余信息(redundancy),来提高设备的可用性
注意disk仍会有故障(也就是可靠性不变)但是由于其他没故障的disk有备份数据(此时冗余信息为备份信息)或者可以计算出丢失的数据(此时冗余信息为校验信息,可以结合无故障的数据计算出丢失的信息),所以整体服务没有中断(可用性),这种做法也有缺点:
- 容量损失:为了存冗余信息占用空闲disk
- 带宽损失:为了更新冗余信息占用带宽

RAID 0 (条带)
RAID0 基本思想:
- 文件按照条带分布式存储
- 无备份(冗余信息)
RAID 1(冗余镜像)
RAID1 基本思想:
- 每个disk都有自己的完全复制体(可以实现很高的可用性,读性能好,但是写操作的时候要写两个盘,带宽消耗大)
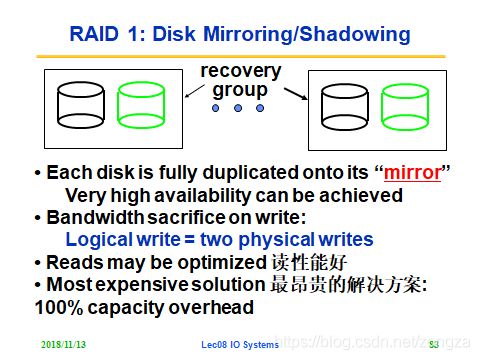
读写特点:
逻辑读 = 一次读操作
逻辑写 = 两次写操作
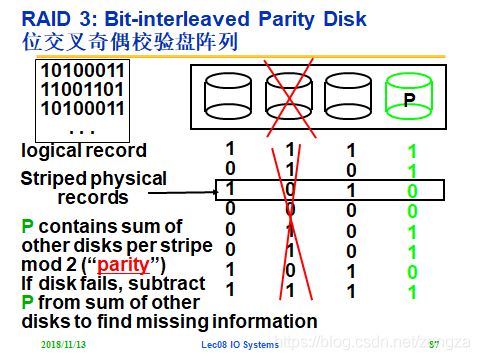
RAID3 位交叉(检验)
基本思想:冗余信息不再是备份,而是对条带中逻辑位的校验信息,只可容忍单盘除错。
校验信息是条带中所有位的和。下图冗余代价为1/3=33%。利用率为3/4。
读写特点:
逻辑读 = 五次读操作
逻辑写 = 三次读操作(计算新的校验位)+两次写操作(写目标数据和检验数据)
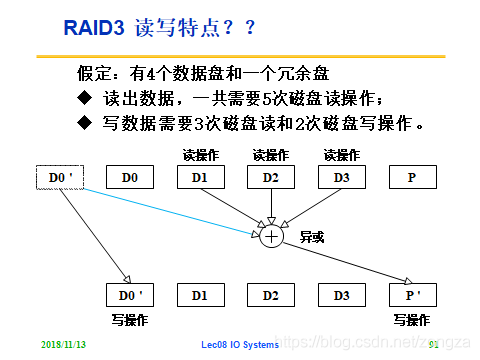
缺点: 一次磁盘访问(读或写)需要对阵列中所有磁盘进行操作【解决:RAID4】
RAID4 块交叉(检验)
基本思想:条带中的信息由位变成块,每个扇区有自己的检错码,因此读操作不会访问校验盘和其他数据盘,使得每个磁盘可以独立地进行读,提高并行度。

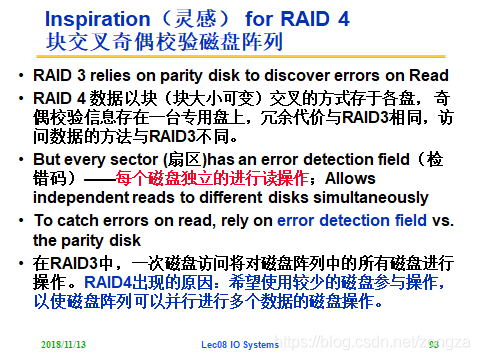
读写特点:
逻辑读 = 一次读操作
逻辑写 = 两次读操作(计算新的校验位)+两次写操作(写目标数据和检验数据)
缺点:多个盘同时进行写操作时,P盘的IO压力较大(每个盘的写都要重写P,而且重写必须串行)【解决:RAID5】
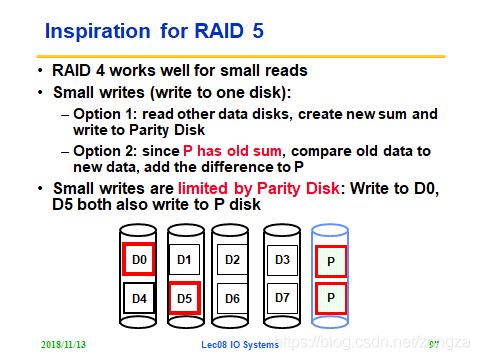
RAID5 块交叉+分布式(检验)
基本思想:检验块均匀分布在所有磁盘上,(而不是单独指定校验盘)这样在写操作修改P的时候不同盘的写可以并行(因为要修改的P不一样了,RAID4中写入D0 D5 需要串行得写disk4(唯一的P),RAID5中可以并行地写disk3,4)。
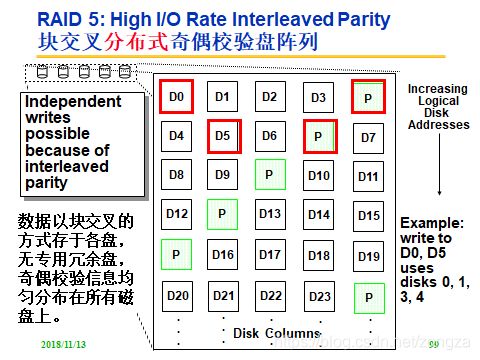
读写特点:
逻辑读 = 一次读操作
逻辑写 = 两次读操作(计算新的校验位)+两次写操作(写目标数据和检验数据)
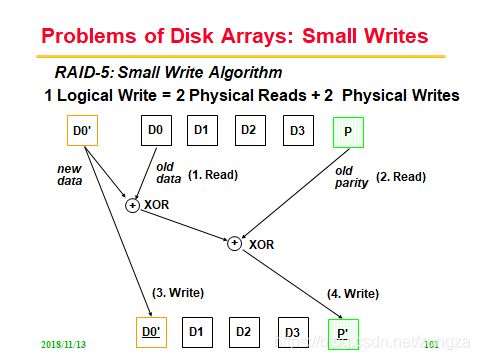
缺点: 只能纠错检错一个盘【解决:RAID6】
RAID6 块交叉+分布式+独立(检验)
基本思想:在RAID5的基础上再增加一个均匀分布的检验块,(两个独立的奇偶系统使用不同的算法)从而容忍双盘出错。
参考:https://www.cnblogs.com/chuncn/p/6008173.html
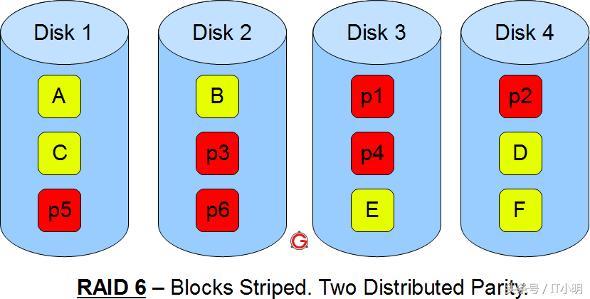
读写特点:
逻辑读 = 一次读操作
逻辑写 = 三次读操作(计算新的校验位)+三次写操作(写目标数据和检验数据)
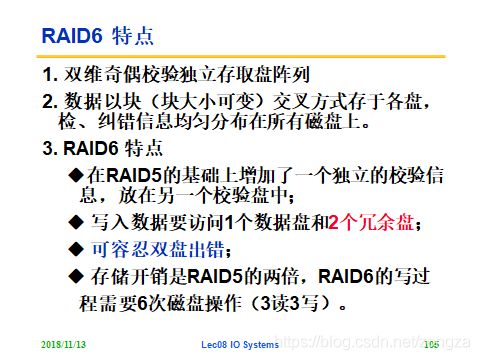
缺点:写性能损失太大。
Chapter 9 Multiprocessor - 1
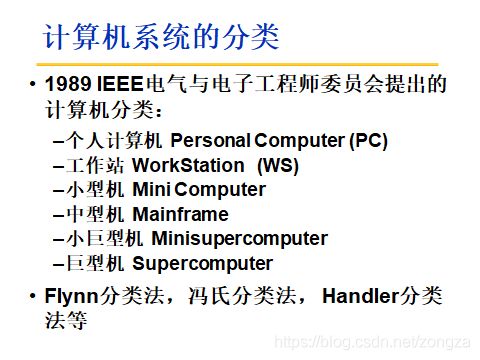
nClassifications of Computers (IEEE) * 计算机分类
nFlynn’s Taxonomy * Flynn分类法
nWhy Vector Computers? * 冲突在哪里?
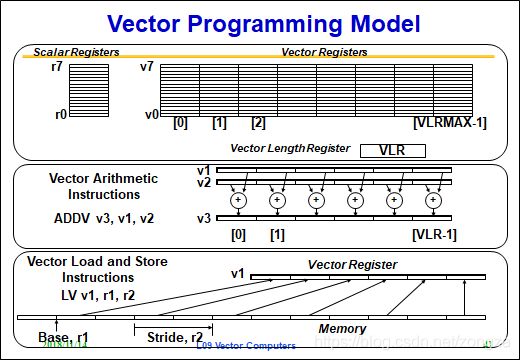
nVector Programming Model and SIMD extensions *
nHow Vector Processors Work: deep pipeline and multiple independent memory banks
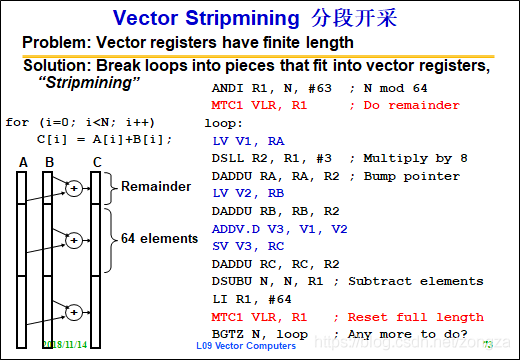
nWhat is Vector Strip-mining 分段开采技术
nWhat is Vector Stride 向量跨距/步长
nMulti-processors & Multi-computers *多处理机与多计算机
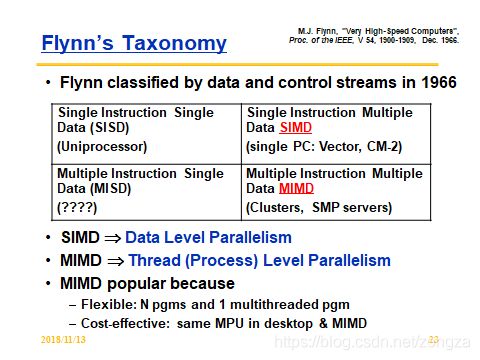
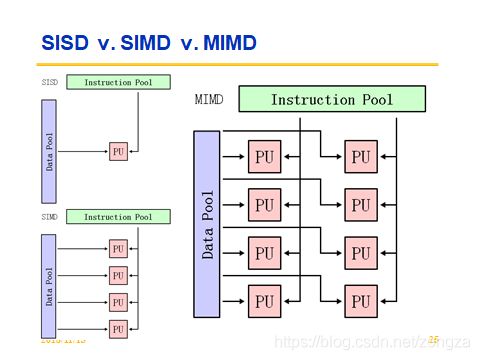
计算机分类(Flynn分类法)
普通分类:
Flynn分类:
基本思想:根据指令流和数据流的多倍性进行分类
值得注意的是SIMD就是前面的数据级并行,MIMD就是线程级并行。

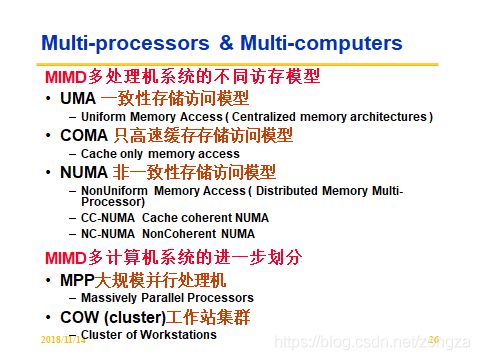
下图显示了MIMD的扩展分类,其中红圈为常用的 架构(多核+共享存储 与 多计算机+分布存储).

SIMD-向量机
为什么会有向量机(向量机比标量机好在那)?
- 同一个向量里的元素(element)之间是相互独立的,因此使用向量指令处理向量数据时硬件不必去检测(向量内)数据冲突
- 两个向量之间的还是有可能回冲突的,但是硬件只需要check一次(check两条向量指令是否有相关),而不需要为向量里的每个元素都check一次,减少了冲突检测的开销
- 向量指令访问内存有已知的访问模式,也就是访存模式固定(也就是向量访存模式固定,不像标量随机存取到处乱放不连续)
- 减少了控制冲突(向量指令替代了整个循环期间的标量指令,前者的行为可以predetermined)
A = [a1 , a2, a3, ..., an]
B = [b1 , b2, b3, ..., bn]a1 a2..之间是相互独立的,但是a1和b1之间可能存在冲突.
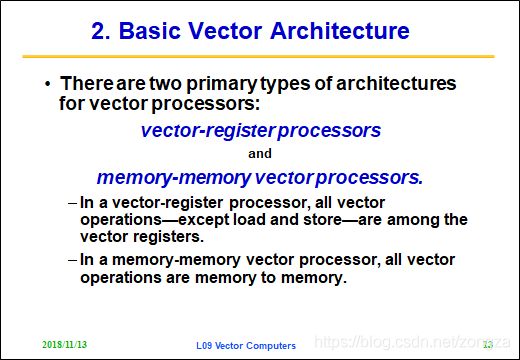
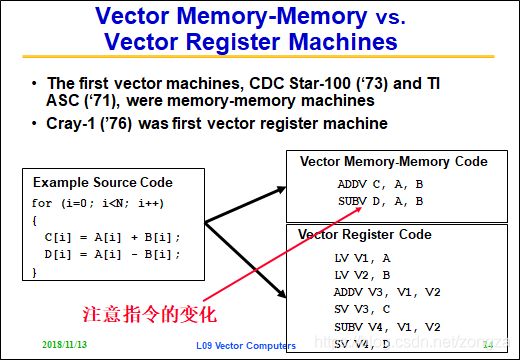
两种向量架构:
因为MM架构的读和写全都在内存,所以会主存带宽要求高,同时由于冲突检测需要在内存进行,因此并行性能低,初始化的时延高,所以MM已经被淘汰了.

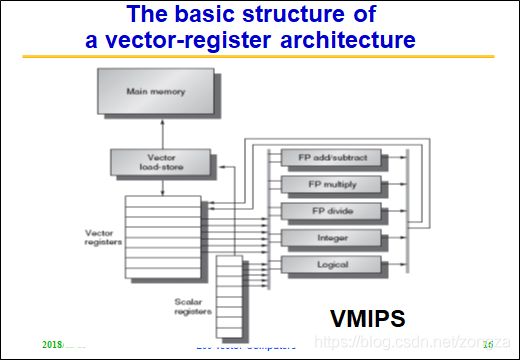
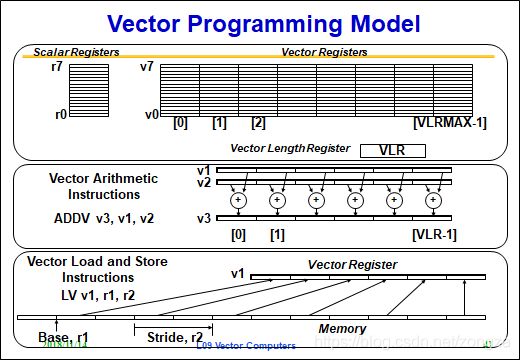
向量编程模型与SIMD扩展:

分段开采和向量步长
分段开采:当向量长度大于向量寄存器的长度时,必须把长向量分成长度固定的段,然后循环分段处理,每次只处理一个向量段。(分段操作是系统自动完成,对程序员透明)

例如N = 68,则循环次数为N / 64 =1 ,余数为4,在循环开始前要先对余数个元素进行计算(Remainder段)
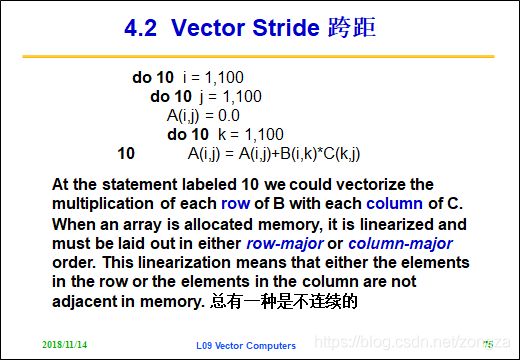
向量步长:mem中向量要提取部分的元素之间的距离 。
例如下面的矩阵乘法中,B的每一行要和C的每一列相乘,矩阵在mem中都是顺序存储的,这就意味着B和C一定有一个不能顺序读出,此时对于不能顺序读出的(假设按照行优先存储)就需要利用stride来提取C中对应的列元素。
下图反映了从mem中使用stride提取向量部分元素值的情况。
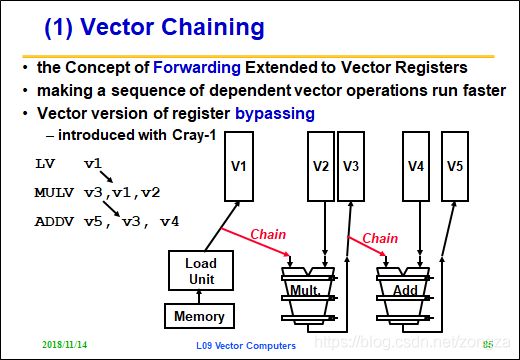
向量链
链接技术相当于流水线定向技术在向量处理机中的应用。
向量流水线链接:有RAW相关的两条指令,在不出现功能部件冲突和其他冲突的情况下,可以把功能部件链接起来进行流水处理。
MIMD
MIMD分成两种:
多核: 基于共享存储器(shared memory),所有处理器共享同一地址空间 ,由load和store实现通信
多计算机: 基于消息传递(message passing),每个处理器有私有局部存储器,处理器之间以传递消息的方式传递数据


Chapter 9 Multiprocessor - 2
nWhat is Computer cluster, SMP, MPP? * 机群、对称式共享存储多处理机、大规模并行处理机
nFlynn-Johnson classification **
n2 classes of multiprocessors with respect to memory: *
- qCentralized Memory Multiprocessor 集中式存储器
- qPhysically Distributed-Memory Multiprocessor 分布式存储器
n2 Models for Communication: *
- qmessage-passing 消息传递
- qShared memory 共享存储
nChallenges of Parallel Processing ** 计算
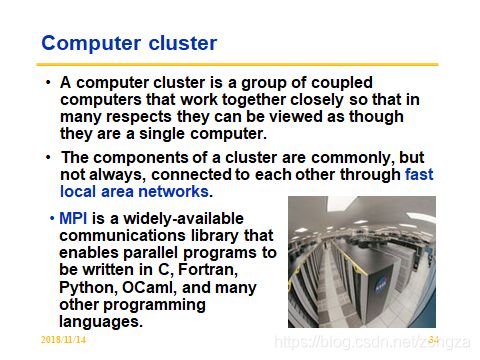
什么是集群,SMP,MPP?
集群: 是一组通过本地高速网络互联的计算机机群,他们可以一起工作.
SMP: 是指使用集中式共享存储器的多核计算机(所谓对称是指MEM与所有处理器的关系都一样)
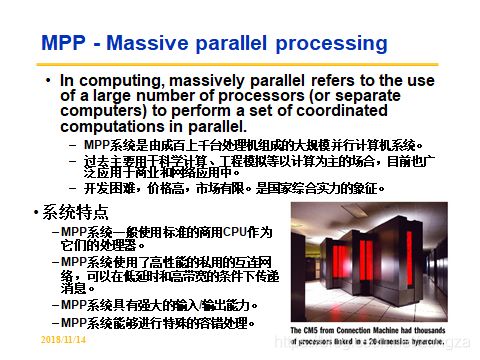
MPP: 是由成百上千台处理器组成的大规模并行计算机系统

两种memory实现
多核的共享存储器可以有两种实现:
集中式存储 分布式存储
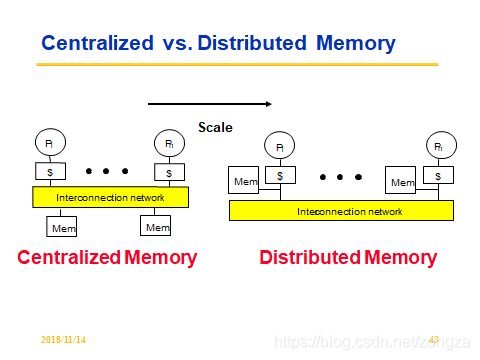
对比:
分布式优点:
- 减少互联网络的带宽占用(如果大多数访存都是针对本地mem)
- 本地存储器访问时延低
分布式缺点:
- 处理器间的通信复杂
- 需要好的软件调度来充分利用增加的带宽
- 处理器之间的访问时延高
两种通信方式
消息传递 和 共享存储 (具体见上一chapter内容)
计算题