Open3d之八叉树(Octree)
简介
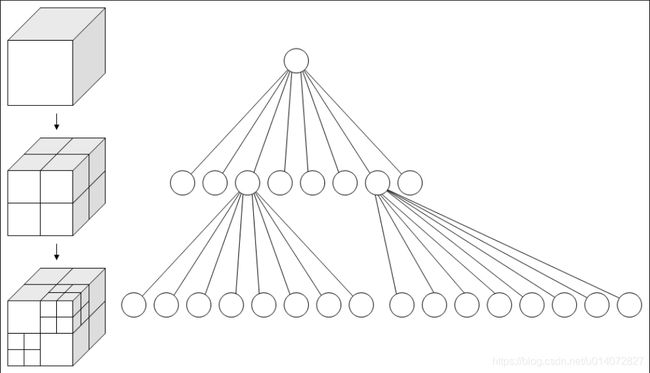
八叉树是一种树数据结构,其中每个内部节点都有八个子节点。八叉树通常用于三维点云的空间划分。 八叉树的非空叶节点包含一个或多个属于同一空间细分的点。 八叉树是一个有用的三维空间描述,可以用来快速找到附近的点。 Open3D的几何类型Octree,可用于创建,搜索和遍历具有用户指定的最大树深度max_depth的八叉树。
从点云中构造八叉树
可以使用convert_from_point_cloud方法从点云中构造八叉树。通过沿着从根节点到深度max_depth处的相应叶节点的路径将每个点插入到树中。 随着树的深度增加,内部(最终是叶子)节点表示3D空间的较小划分。
如果点云具有颜色,则相应的叶节点采用最后插入的点的颜色。 size_expand参数增加了根八叉树节点的大小,因此它比原始点云边界稍大以容纳所有点。
# -*- coding: UTF-8 -*-
import numpy as np
import open3d as o3d
import Open3D.examples.python.open3d_tutorial as o3dtut
# 加载点云,并采样2000个点
N = 2000
pcd = o3dtut.get_armadillo_mesh().sample_points_poisson_disk(N)
# 点云归一化
pcd.scale(1 / np.max(pcd.get_max_bound() - pcd.get_min_bound()),
center=pcd.get_center())
# 点云着色
pcd.colors = o3d.utility.Vector3dVector(np.random.uniform(0, 1, size=(N, 3)))
# 可视化
o3d.visualization.draw_geometries([pcd])
# 创建八叉树, 树深为4
octree = o3d.geometry.Octree(max_depth=4)
# 从点云中构建八叉树,适当扩展边界0.01m
octree.convert_from_point_cloud(pcd, size_expand=0.01)
# 可视化
o3d.visualization.draw_geometries([octree])

从体素网格中构造八叉树
也可以使用create_from_voxel_grid方法从Open3D的VoxelGrid几何结构中构造八叉树。 输入VoxelGrid的每个体素都被视为3D空间中的一个点,其坐标对应于该体素的原点。 每个叶节点都采用其相应体素的颜色。
# 从点云中创建体素网格, 体素大小为0.05m
voxel_grid = o3d.geometry.VoxelGrid.create_from_point_cloud(pcd, voxel_size=0.05)
# 体素可视化
o3d.visualization.draw_geometries([voxel_grid])
# 创建八叉树, 树深为4
octree = o3d.geometry.Octree(max_depth=4)
# 从体素网格中构建八叉树
octree.create_from_voxel_grid(voxel_grid)
# 可视化
o3d.visualization.draw_geometries([octree])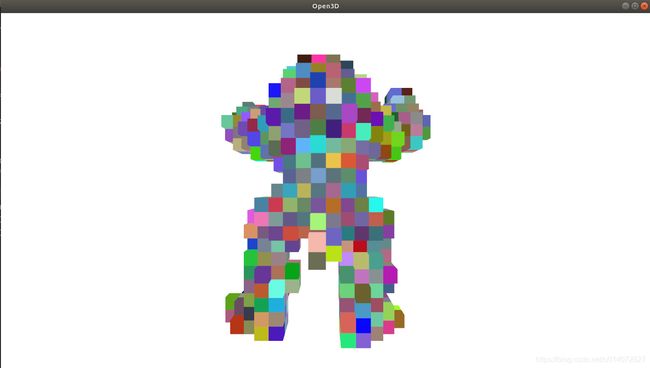

另外,可使用to_voxel_grid将Octree转变为VoxelGrid。
遍历八叉树
可以遍历八叉树,这对于搜索或处理3D几何体的子部分很有用。通过向traverse方法提供回调,每次访问节点(内部或叶)时,都可以执行额外的处理。
在下面的示例中,提前停止标准仅用于处理具有超过特定点数的内部/叶节点。这种提前停止能力可以有效地处理满足一定条件的空间区域。
def f_traverse(node, node_info):
early_stop = False
if isinstance(node, o3d.geometry.OctreeInternalNode):
if isinstance(node, o3d.geometry.OctreeInternalPointNode):
n = 0
for child in node.children:
if child is not None:
n += 1
print(
"{}{}: Internal node at depth {} has {} children and {} points ({})"
.format(' ' * node_info.depth,
node_info.child_index, node_info.depth, n,
len(node.indices), node_info.origin))
# we only want to process nodes / spatial regions with enough points
early_stop = len(node.indices) < 250
elif isinstance(node, o3d.geometry.OctreeLeafNode):
if isinstance(node, o3d.geometry.OctreePointColorLeafNode):
print("{}{}: Leaf node at depth {} has {} points with origin {}".
format(' ' * node_info.depth, node_info.child_index,
node_info.depth, len(node.indices), node_info.origin))
else:
raise NotImplementedError('Node type not recognized!')
# early stopping: if True, traversal of children of the current node will be skipped
return early_stop
# 创建八叉树, 树深为4
octree = o3d.geometry.Octree(max_depth=4)
# 从点云中创建体素网格, 体素大小为0.01m
octree.convert_from_point_cloud(pcd, size_expand=0.01)
# 遍历
octree.traverse(f_traverse)查找包含点的叶节点
使用上述遍历机制,可以快速地在八叉树中搜索包含给定点的叶节点。 通过locate_leaf_node方法提供此功能。
octree.locate_leaf_node(pcd.points[0])