- AI大模型的架构演进与最新发展
季风泯灭的季节
AI大模型应用技术二人工智能架构
随着深度学习的发展,AI大模型(LargeLanguageModels,LLMs)在自然语言处理、计算机视觉等领域取得了革命性的进展。本文将详细探讨AI大模型的架构演进,包括从Transformer的提出到GPT、BERT、T5等模型的历史演变,并探讨这些模型的技术细节及其在现代人工智能中的核心作用。一、基础模型介绍:Transformer的核心原理Transformer架构的背景在Transfo
- 个人学习笔记7-6:动手学深度学习pytorch版-李沐
浪子L
深度学习深度学习笔记计算机视觉python人工智能神经网络pytorch
#人工智能##深度学习##语义分割##计算机视觉##神经网络#计算机视觉13.11全卷积网络全卷积网络(fullyconvolutionalnetwork,FCN)采用卷积神经网络实现了从图像像素到像素类别的变换。引入l转置卷积(transposedconvolution)实现的,输出的类别预测与输入图像在像素级别上具有一一对应关系:通道维的输出即该位置对应像素的类别预测。13.11.1构造模型下
- 计算机视觉中,Pooling的作用
Wils0nEdwards
计算机视觉人工智能
在计算机视觉中,Pooling(池化)是一种常见的操作,主要用于卷积神经网络(CNN)中。它通过对特征图进行下采样,减少数据的空间维度,同时保留重要的特征信息。Pooling的作用可以归纳为以下几个方面:1.降低计算复杂度与内存需求Pooling操作通过对特征图进行下采样,减少了特征图的空间分辨率(例如,高度和宽度)。这意味着网络需要处理的数据量会减少,从而降低了计算量和内存需求。这对大型神经网络
- OpenCV图像处理技术(Python)——入门
森屿_
opencv
©FuXianjun.AllRightsReserved.OpenCV入门图像作为人类感知世界的视觉基础,是人类获取信息、表达信息的重要手段,OpenCV作为一个开源的计算机视觉库,它包括几百个易用的图像成像和视觉函数,既可以用于学术研究,也可用于工业邻域,它于1999年由因特尔的GaryBradski启动,OpenCV库主要由C和C++语言编写,它可以在多个操作系统上运行。1.1图像处理基本操作
- CV、NLP、数据控掘推荐、量化
海的那边-
AI算法自然语言处理人工智能
下面是对CV(计算机视觉)、NLP(自然语言处理)、数据挖掘推荐和量化的简要概述及其应用领域的介绍:1.CV(计算机视觉,ComputerVision)定义:计算机视觉是一门让计算机能够从图像或视频中提取有用信息,并做出决策的学科。它通过模拟人类的视觉系统来识别、处理和理解视觉信息。主要任务:图像分类:识别图像中的物体并分类,比如猫、狗、车等。目标检测:在图像或视频中定位并识别多个对象,如人脸检测
- Python计算机视觉编程 第三章 图像到图像的映射
一只小小程序猿
计算机视觉pythonopencv
目录单应性变换直接线性变换算法仿射变换图像扭曲图像中的图像分段仿射扭曲创建全景图RANSAC拼接图像单应性变换单应性变换是将一个平面内的点映射到另一个平面内的二维投影变换。在这里,平面是指图像或者三维中的平面表面。单应性变换具有很强的实用性,比如图像配准、图像纠正和纹理扭曲,以及创建全景图像。单应性变换本质上是一种二维到二维的映射,可以将一个平面内的点映射到另一个平面上的对应点。代码如下:impo
- DIODE:超高分辨率室内室外数据集(猫脸码客 第186期)
猫脸码客: catCode2024
开源数据集猫脸码客开源数据集超高分辨率室内室外数据集
亲爱的读者们,您是否在寻找某个特定的数据集,用于研究或项目实践?欢迎您在评论区留言,或者通过公众号私信告诉我,您想要的数据集的类型主题。小编会竭尽全力为您寻找,并在找到后第一时间与您分享。在计算机视觉和深度学习领域,深度信息作为三维空间感知的重要组成部分,对于实现高级视觉任务如场景理解、机器人导航、增强现实等具有至关重要的作用。然而,获取准确且密集的深度数据一直是一个挑战,尤其是在同时涵盖室内和室
- 深度学习入门篇:PyTorch实现手写数字识别
AI_Guru人工智能
深度学习pytorch人工智能
深度学习作为机器学习的一个分支,近年来在图像识别、自然语言处理等领域取得了显著的成就。在众多的深度学习框架中,PyTorch以其动态计算图、易用性强和灵活度高等特点,受到了广泛的喜爱。本篇文章将带领大家使用PyTorch框架,实现一个手写数字识别的基础模型。手写数字识别简介手写数字识别是计算机视觉领域的一个经典问题,目的是让计算机能够识别并理解手写数字图像。这个问题通常作为深度学习入门的练习,因为
- OpenCV高阶操作
富士达幸运星
opencv人工智能计算机视觉
在图像处理与计算机视觉领域,OpenCV(OpenSourceComputerVisionLibrary)无疑是最为强大且广泛使用的工具之一。从基础的图像读取、1.图片的上下,采样下采样(Downsampling)下采样通常用于减小图像的尺寸,从而减少图像中的像素数。这个过程可以通过多种方法实现,但最常见的是通过图像金字塔中的pyrDown函数(在OpenCV中)或其他类似的滤波器(如平均池化、最
- 深入掌握大模型精髓:《实战AI大模型》带你全面理解大模型开发!
努力的光头强
人工智能langchainprompttransformer深度学习
今天,人工智能技术的快速发展和广泛应用已经引起了大众的关注和兴趣,它不仅成为技术发展的核心驱动力,更是推动着社会生活的全方位变革。特别是作为AI重要分支的深度学习,通过不断刷新的表现力已引领并定义了一场科技革命。大型深度学习模型(简称AI大模型)以其强大的表征能力和卓越的性能,在自然语言处理、计算机视觉、推荐系统等领域均取得了突破性的进展。尤其随着AI大模型的广泛应用,无数领域因此受益。AI大模型
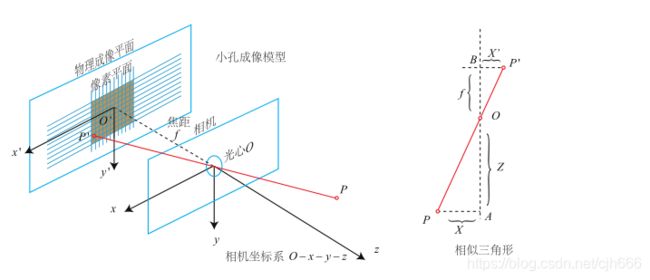
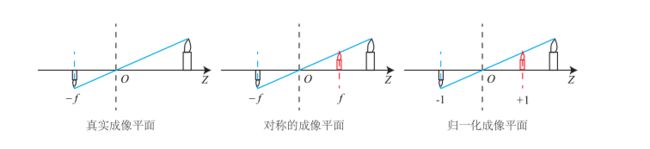
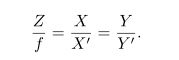
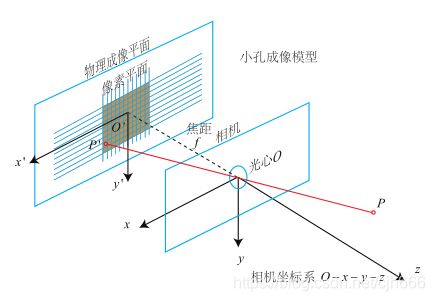
- 计算机视觉—照相机(下)
zidea
封面焦距(FieldofView)同一位置相机用不同焦距,28mmFieldofView就变小,85mm时候的Fieldofview也就是只有28度视野,每一个物体在通常尺寸的胶片上像素也就是越多,chromaticAberration焦距和是波长相关,不同颜色光聚焦在不同位置。这种现象在物体边缘尤为明显。颜色颜色说简单也简单,说复杂也复杂,我们在高中物理已经知道可见光是电磁波,不同颜色对应不同波
- Python OpenCV精讲系列 - 高级图像处理技术(五)
极客代码
PythonOpenCV精讲pythonopencv图像处理开发语言人工智能计算机视觉
⚡️⚡️专栏:PythonOpenCV精讲⚡️⚡️本专栏聚焦于Python结合OpenCV库进行计算机视觉开发的专业教程。通过系统化的课程设计,从基础概念入手,逐步深入到图像处理、特征检测、物体识别等多个领域。适合希望在计算机视觉方向上建立坚实基础的技术人员及研究者。每一课不仅包含理论讲解,更有实战代码示例,助力读者快速将所学应用于实际项目中,提升解决复杂视觉问题的能力。无论是入门者还是寻求技能进
- 计算机视觉中的数据增强方法总结
CV技术指南(公众号)
CV技术总结计算机视觉深度学习卷积神经网络
前言:在计算机视觉方向,数据增强的本质是人为地引入人视觉上的先验知识,可以很好地提升模型的性能,目前基本成为模型的标配。最近几年逐渐出了很多新的数据增强方法,在本文将对数据增强做一个总结。本文介绍了数据增强的作用,数据增强的分类,数据增强的常用方法,一些特殊的方法,如Cutout,RandomErasing,Mixup,Hide-and-Seek,CutMix,GridMask,FenceMask
- 计算机视觉中,什么是Hide-and-Seek?
Wils0nEdwards
计算机视觉人工智能
是的,Hide-and-Seek技术主要是在弱监督学习领域中使用的,它的核心思想是通过随机遮掩输入图像的一部分,强迫模型学习更全面的特征,而不是仅仅依赖显著的局部信息。由于弱监督场景下的监督信号有限,例如只有少量的点标注、粗略标注或没有任何标注,模型容易过度依赖于图像中最显著的部分,而忽略其他信息。这种现象会导致模型只关注容易识别的局部特征,而无法理解物体的整体结构或捕捉更多的背景信息。1.Hid
- 目标检测YOLO系列从入门到精通技术详解100篇-【目标检测】工业相机
格图素书
数码相机目标检测人工智能
目录知识储备深度相机1TOF2双目视觉3结构光4智能门锁应用5手机应用算法原理相机的成像与标定模型相机标定的实施·标定过程的算法实施相机标定的扩展CCD工业相机、镜头倍率及相关参数计算方法知识储备深度相机1TOF1.1Kinectv2Kinectv2是Microsoft在2014年发售的,如图1-1所示。相比于Kinectv1在硬件和软件上作出了很大的进化,且在深度测量的系统和非系统误差方面表现出
- 计算机视觉——第三章 图像拼接
JMU15980999055
python计算机视觉人工智能
计算机视觉——第三章图像拼接1.图像全景拼接的原理和过程的简要介绍1.1特征点提取和匹配1.2图像配准1.3图像拼接2.实现多图像拼接2.1图片集说明2.2实验代码2.3实验结果及其分析3.两张不同角度的图像拼接3.1图片集说明3.2实验代码3.3实验结果及其分析总结1.图像全景拼接的原理和过程的简要介绍在同一位置拍摄的两幅或者多幅图片是单应性相关的,我们经常使用该约束将很多图像缝补起来,拼成一个
- 计算机视觉学习路线
不会代码的小林
计算机视觉
计算机视觉学习路线是一个系统而全面的过程,涵盖了从基础知识到高级应用的多个方面。以下是一个详细的计算机视觉学习路线,供您参考:一、基础知识学习编程语言与基础库学习Python语言,掌握基础语法、函数、面向对象编程等概念。Python是计算机视觉领域广泛使用的编程语言,因其简洁易读和丰富的库支持而受到青睐。学习Numpy库,用于科学计算和多维数组操作,这是计算机视觉中数据处理的基础。学习OpenCV
- 【Python第三方库】OpenCV库实用指南
墨辰JC
Pythonopencvpython人工智能学习
文章目录前言安装OpenCV读取图像图像基本操作获取图像信息裁剪图像图像缩放图像转换为灰度图图像模糊处理边缘检测图像翻转图像保存视频相关操作方法讲解读取视频从摄像头读取视频前言OpenCV(OpenSourceComputerVisionLibrary)作为一个强大的计算机视觉库,提供了丰富的图像处理和计算机视觉功能,尤其在图像识别、对象检测、视频分析等领域有着广泛的应用。本文将带领读者使用Pyt
- ESRGAN——老旧照片、视频帧的修复和增强,提高图像的分辨率
爱研究的小牛
AIGC——图像AIGC—视频AIGC人工智能深度学习音视频自动化
ESRGAN(EnhancedSuper-ResolutionGAN):用于提高图像的分辨率,将低质量图像升级为高分辨率版本,常用于老旧照片、视频帧的修复和增强。一、ESRGAN介绍1.1背景超分辨率问题是计算机视觉中的一个重要研究领域,其目标是通过增加像素数量来提高图像的分辨率,恢复出更加细腻的图像。传统的算法(如双三次插值)通常导致放大后的图像模糊、不自然。而深度学习特别是**生成对抗网络(G
- 计算机视觉之旅-进阶-图像滤波处理
撸码猿
计算机视觉图像处理人工智能
1.基本概念1.1.数字图像图像处理的对象是数字图像,它是由像素点阵列表示的图像。需要了解像素、图像分辨率、灰度级、RBG等图像表示方法。用numpy数组表示,每个元素为像素值。例如RGB图像 importnumpyasnp img=np.array([[[255,0,0],[0,255,0]],[[0,0,255],[255,255,255]]]) 1.2.采样和量化数字图像是通过采样和量化得到
- 探秘3D UNet-PyTorch:高效三维图像分割利器
鲍凯印Fox
探秘3DUNet-PyTorch:高效三维图像分割利器在医学影像处理、计算机视觉和自动驾驶等领域,三维图像的理解与分析至关重要。而是一个基于PyTorch实现的深度学习模型,专为三维图像分割任务设计。本文将深入剖析该项目的技术细节,应用场景及特性,以期吸引更多的开发者和研究人员参与其中。项目简介3DUNet是2DUNet的三维扩展,其结构保持了卷积神经网络的对称性,采用跳跃连接的方式保留了不同尺度
- 论文学习笔记 VMamba: Visual State Space Model
Wils0nEdwards
学习笔记
概览这篇论文的动机源于在计算机视觉领域设计计算高效的网络架构的持续需求。当前的视觉模型如卷积神经网络(CNNs)和视觉Transformer(ViTs)在处理大规模视觉任务时展现出良好的表现,但都存在各自的局限性。特别是,ViTs尽管在处理大规模数据上具有优势,但其自注意力机制的二次复杂度对高分辨率图像处理时的计算成本极高。因此,研究者希望通过引入新的架构来降低这种复杂度,并提高视觉任务的效率。现
- 深度学习计算机视觉中 feature modulation 操作是什么?
Wils0nEdwards
深度学习计算机视觉人工智能
什么是特征调制(FeatureModulation)?在深度学习与计算机视觉领域,特征调制(FeatureModulation)是一种用于增强模型灵活性和表达能力的技术,尤其是最近几年,它在许多任务中变得越来越重要。特征调制通过动态调整神经网络中间层的特征,使模型能够根据不同的上下文、输入或任务自适应地调整自身的行为。特征调制的核心概念特征调制的基本思想是通过某种形式的参数调节来改变特征表示的性质
- 计算机视觉中,如何理解自适应和注意力机制的关系?
Wils0nEdwards
计算机视觉人工智能
自适应和注意力机制之间的关系密切相关,注意力机制本质上是一种自适应的计算方法,它能够根据输入数据的不同特点,自主选择和聚焦于输入的某些部分或特征。以下是两者之间的具体关系和如何理解它们:1.注意力机制的自适应特性注意力机制的核心功能是为不同输入元素(如特征、位置、通道等)分配不同的权重。这些权重是通过学习动态生成的,表示模型对不同输入元素的关注程度。由于这些权重是根据具体的输入数据动态计算的,因此
- 解锁Python中的人脸识别:Face Recognition库详解与应用
码上飞扬
Recognition人脸识别
在当今的人工智能时代,人脸识别技术已经成为了计算机视觉领域的一项重要应用。无论是在安全监控、社交媒体还是智能设备中,人脸识别都扮演着不可或缺的角色。在众多的人脸识别工具和库中,Python的FaceRecognition库以其简单易用和高效性而备受青睐。本文将深入探讨FaceRecognition库的使用方法、工作原理及其应用场景,帮助你快速掌握这一强大的工具。一、什么是FaceRecogniti
- OpenCV3最常用的基本操作
HeoLis
OpenCV介绍OpenCV的全称是OpenSourceComputerVisionLibrary,是一个跨平台的计算机视觉库。OpenCV是由英特尔公司发起并参与开发,以BSD许可证授权发行,可以在商业和研究领域中免费使用。OpenCV可用于开发实时的图像处理、计算机视觉以及模式识别程序。该程序库也可以使用英特尔公司的IPP进行加速处理。以上是维基百科关于OpenCV的介绍,简单来说它就是处理图
- 论文阅读笔记: DINOv2: Learning Robust Visual Features without Supervision
小夏refresh
论文计算机视觉深度学习论文阅读笔记深度学习计算机视觉人工智能
DINOv2:LearningRobustVisualFeatureswithoutSupervision论文地址:https://arxiv.org/abs/2304.07193代码地址:https://github.com/facebookresearch/dinov2摘要大量数据上的预训练模型在NLP方面取得突破,为计算机视觉中的类似基础模型开辟了道路。这些模型可以通过生成通用视觉特征(即无
- Sora文本生成影像模型背后的创新原理与挑战
noVonN
c语言深度学习算法区块链人工智能
引言随着人工智能技术的飞速发展,OpenAI作为行业领导者,在文本生成领域取得重大突破之后,近日又推出了其在影像生成领域的最新力作——Sora。这款模型将自然语言处理与计算机视觉技术相结合,旨在通过输入文本描述来快速创作出逼真的电影场景,为内容创作者提供了前所未有的艺术表达工具。然而,正如OpenAI所指出的那样,尽管Sora展现出了令人惊叹的创造力,但它在仿真复杂物理现象和理解具体事例因果关系方
- 深度学习驱动下的字符识别:挑战与创新
逼子歌
神经网络深度学习字符识别卷积神经网络图像处理特征提取
一、引言1.1研究背景深度学习在字符识别领域具有至关重要的地位。随着信息技术的飞速发展,对字符识别的准确性和效率要求越来越高。字符识别作为计算机视觉领域的一个重要研究方向,其主要目的是将各种形式的字符转换成计算机可识别的文本信息。近年来,深度学习技术在字符识别领域取得了显著的进展。国内研究者主要使用基于模板匹配的方法、基于统计模型的方法、基于神经网络的方法等各种方法进行字符识别研究。目前,国内各大
- 【深度学习实战】行人检测追踪与双向流量计数系统【python源码+Pyqt5界面+数据集+训练代码】YOLOv8、ByteTrack、目标追踪、双向计数、行人检测追踪、过线计数
阿_旭
AI应用软件开发实战深度学习实战深度学习python行人检测行人追踪过线计数
《博主简介》小伙伴们好,我是阿旭。专注于人工智能、AIGC、python、计算机视觉相关分享研究。✌更多学习资源,可关注公-仲-hao:【阿旭算法与机器学习】,共同学习交流~感谢小伙伴们点赞、关注!《------往期经典推荐------》一、AI应用软件开发实战专栏【链接】项目名称项目名称1.【人脸识别与管理系统开发】2.【车牌识别与自动收费管理系统开发】3.【手势识别系统开发】4.【人脸面部活体
- 深入浅出Java Annotation(元注解和自定义注解)
Josh_Persistence
Java Annotation元注解自定义注解
一、基本概述
Annontation是Java5开始引入的新特征。中文名称一般叫注解。它提供了一种安全的类似注释的机制,用来将任何的信息或元数据(metadata)与程序元素(类、方法、成员变量等)进行关联。
更通俗的意思是为程序的元素(类、方法、成员变量)加上更直观更明了的说明,这些说明信息是与程序的业务逻辑无关,并且是供指定的工具或
- mysql优化特定类型的查询
annan211
java工作mysql
本节所介绍的查询优化的技巧都是和特定版本相关的,所以对于未来mysql的版本未必适用。
1 优化count查询
对于count这个函数的网上的大部分资料都是错误的或者是理解的都是一知半解的。在做优化之前我们先来看看
真正的count()函数的作用到底是什么。
count()是一个特殊的函数,有两种非常不同的作用,他可以统计某个列值的数量,也可以统计行数。
在统
- MAC下安装多版本JDK和切换几种方式
棋子chessman
jdk
环境:
MAC AIR,OS X 10.10,64位
历史:
过去 Mac 上的 Java 都是由 Apple 自己提供,只支持到 Java 6,并且OS X 10.7 开始系统并不自带(而是可选安装)(原自带的是1.6)。
后来 Apple 加入 OpenJDK 继续支持 Java 6,而 Java 7 将由 Oracle 负责提供。
在终端中输入jav
- javaScript (1)
Array_06
JavaScriptjava浏览器
JavaScript
1、运算符
运算符就是完成操作的一系列符号,它有七类: 赋值运算符(=,+=,-=,*=,/=,%=,<<=,>>=,|=,&=)、算术运算符(+,-,*,/,++,--,%)、比较运算符(>,<,<=,>=,==,===,!=,!==)、逻辑运算符(||,&&,!)、条件运算(?:)、位
- 国内顶级代码分享网站
袁潇含
javajdkoracle.netPHP
现在国内很多开源网站感觉都是为了利益而做的
当然利益是肯定的,否则谁也不会免费的去做网站
&
- Elasticsearch、MongoDB和Hadoop比较
随意而生
mongodbhadoop搜索引擎
IT界在过去几年中出现了一个有趣的现象。很多新的技术出现并立即拥抱了“大数据”。稍微老一点的技术也会将大数据添进自己的特性,避免落大部队太远,我们看到了不同技术之间的边际的模糊化。假如你有诸如Elasticsearch或者Solr这样的搜索引擎,它们存储着JSON文档,MongoDB存着JSON文档,或者一堆JSON文档存放在一个Hadoop集群的HDFS中。你可以使用这三种配
- mac os 系统科研软件总结
张亚雄
mac os
1.1 Microsoft Office for Mac 2011
大客户版,自行搜索。
1.2 Latex (MacTex):
系统环境:https://tug.org/mactex/
&nb
- Maven实战(四)生命周期
AdyZhang
maven
1. 三套生命周期 Maven拥有三套相互独立的生命周期,它们分别为clean,default和site。 每个生命周期包含一些阶段,这些阶段是有顺序的,并且后面的阶段依赖于前面的阶段,用户和Maven最直接的交互方式就是调用这些生命周期阶段。 以clean生命周期为例,它包含的阶段有pre-clean, clean 和 post
- Linux下Jenkins迁移
aijuans
Jenkins
1. 将Jenkins程序目录copy过去 源程序在/export/data/tomcatRoot/ofctest-jenkins.jd.com下面 tar -cvzf jenkins.tar.gz ofctest-jenkins.jd.com &
- request.getInputStream()只能获取一次的问题
ayaoxinchao
requestInputstream
问题:在使用HTTP协议实现应用间接口通信时,服务端读取客户端请求过来的数据,会用到request.getInputStream(),第一次读取的时候可以读取到数据,但是接下来的读取操作都读取不到数据
原因: 1. 一个InputStream对象在被读取完成后,将无法被再次读取,始终返回-1; 2. InputStream并没有实现reset方法(可以重
- 数据库SQL优化大总结之 百万级数据库优化方案
BigBird2012
SQL优化
网上关于SQL优化的教程很多,但是比较杂乱。近日有空整理了一下,写出来跟大家分享一下,其中有错误和不足的地方,还请大家纠正补充。
这篇文章我花费了大量的时间查找资料、修改、排版,希望大家阅读之后,感觉好的话推荐给更多的人,让更多的人看到、纠正以及补充。
1.对查询进行优化,要尽量避免全表扫描,首先应考虑在 where 及 order by 涉及的列上建立索引。
2.应尽量避免在 where
- jsonObject的使用
bijian1013
javajson
在项目中难免会用java处理json格式的数据,因此封装了一个JSONUtil工具类。
JSONUtil.java
package com.bijian.json.study;
import java.util.ArrayList;
import java.util.Date;
import java.util.HashMap;
- [Zookeeper学习笔记之六]Zookeeper源代码分析之Zookeeper.WatchRegistration
bit1129
zookeeper
Zookeeper类是Zookeeper提供给用户访问Zookeeper service的主要API,它包含了如下几个内部类
首先分析它的内部类,从WatchRegistration开始,为指定的znode path注册一个Watcher,
/**
* Register a watcher for a particular p
- 【Scala十三】Scala核心七:部分应用函数
bit1129
scala
何为部分应用函数?
Partially applied function: A function that’s used in an expression and that misses some of its arguments.For instance, if function f has type Int => Int => Int, then f and f(1) are p
- Tomcat Error listenerStart 终极大法
ronin47
tomcat
Tomcat报的错太含糊了,什么错都没报出来,只提示了Error listenerStart。为了调试,我们要获得更详细的日志。可以在WEB-INF/classes目录下新建一个文件叫logging.properties,内容如下
Java代码
handlers = org.apache.juli.FileHandler, java.util.logging.ConsoleHa
- 不用加减符号实现加减法
BrokenDreams
实现
今天有群友发了一个问题,要求不用加减符号(包括负号)来实现加减法。
分析一下,先看最简单的情况,假设1+1,按二进制算的话结果是10,可以看到从右往左的第一位变为0,第二位由于进位变为1。
- 读《研磨设计模式》-代码笔记-状态模式-State
bylijinnan
java设计模式
声明: 本文只为方便我个人查阅和理解,详细的分析以及源代码请移步 原作者的博客http://chjavach.iteye.com/
/*
当一个对象的内在状态改变时允许改变其行为,这个对象看起来像是改变了其类
状态模式主要解决的是当控制一个对象状态的条件表达式过于复杂时的情况
把状态的判断逻辑转移到表示不同状态的一系列类中,可以把复杂的判断逻辑简化
如果在
- CUDA程序block和thread超出硬件允许值时的异常
cherishLC
CUDA
调用CUDA的核函数时指定block 和 thread大小,该大小可以是dim3类型的(三维数组),只用一维时可以是usigned int型的。
以下程序验证了当block或thread大小超出硬件允许值时会产生异常!!!GPU根本不会执行运算!!!
所以验证结果的正确性很重要!!!
在VS中创建CUDA项目会有一个模板,里面有更详细的状态验证。
以下程序在K5000GPU上跑的。
- 诡异的超长时间GC问题定位
chenchao051
jvmcmsGChbaseswap
HBase的GC策略采用PawNew+CMS, 这是大众化的配置,ParNew经常会出现停顿时间特别长的情况,有时候甚至长到令人发指的地步,例如请看如下日志:
2012-10-17T05:54:54.293+0800: 739594.224: [GC 739606.508: [ParNew: 996800K->110720K(996800K), 178.8826900 secs] 3700
- maven环境快速搭建
daizj
安装mavne环境配置
一 下载maven
安装maven之前,要先安装jdk及配置JAVA_HOME环境变量。这个安装和配置java环境不用多说。
maven下载地址:http://maven.apache.org/download.html,目前最新的是这个apache-maven-3.2.5-bin.zip,然后解压在任意位置,最好地址中不要带中文字符,这个做java 的都知道,地址中出现中文会出现很多
- PHP网站安全,避免PHP网站受到攻击的方法
dcj3sjt126com
PHP
对于PHP网站安全主要存在这样几种攻击方式:1、命令注入(Command Injection)2、eval注入(Eval Injection)3、客户端脚本攻击(Script Insertion)4、跨网站脚本攻击(Cross Site Scripting, XSS)5、SQL注入攻击(SQL injection)6、跨网站请求伪造攻击(Cross Site Request Forgerie
- yii中给CGridView设置默认的排序根据时间倒序的方法
dcj3sjt126com
GridView
public function searchWithRelated() {
$criteria = new CDbCriteria;
$criteria->together = true; //without th
- Java集合对象和数组对象的转换
dyy_gusi
java集合
在开发中,我们经常需要将集合对象(List,Set)转换为数组对象,或者将数组对象转换为集合对象。Java提供了相互转换的工具,但是我们使用的时候需要注意,不能乱用滥用。
1、数组对象转换为集合对象
最暴力的方式是new一个集合对象,然后遍历数组,依次将数组中的元素放入到新的集合中,但是这样做显然过
- nginx同一主机部署多个应用
geeksun
nginx
近日有一需求,需要在一台主机上用nginx部署2个php应用,分别是wordpress和wiki,探索了半天,终于部署好了,下面把过程记录下来。
1. 在nginx下创建vhosts目录,用以放置vhost文件。
mkdir vhosts
2. 修改nginx.conf的配置, 在http节点增加下面内容设置,用来包含vhosts里的配置文件
#
- ubuntu添加admin权限的用户账号
hongtoushizi
ubuntuuseradd
ubuntu创建账号的方式通常用到两种:useradd 和adduser . 本人尝试了useradd方法,步骤如下:
1:useradd
使用useradd时,如果后面不加任何参数的话,如:sudo useradd sysadm 创建出来的用户将是默认的三无用户:无home directory ,无密码,无系统shell。
顾应该如下操作:
- 第五章 常用Lua开发库2-JSON库、编码转换、字符串处理
jinnianshilongnian
nginxlua
JSON库
在进行数据传输时JSON格式目前应用广泛,因此从Lua对象与JSON字符串之间相互转换是一个非常常见的功能;目前Lua也有几个JSON库,本人用过cjson、dkjson。其中cjson的语法严格(比如unicode \u0020\u7eaf),要求符合规范否则会解析失败(如\u002),而dkjson相对宽松,当然也可以通过修改cjson的源码来完成
- Spring定时器配置的两种实现方式OpenSymphony Quartz和java Timer详解
yaerfeng1989
timerquartz定时器
原创整理不易,转载请注明出处:Spring定时器配置的两种实现方式OpenSymphony Quartz和java Timer详解
代码下载地址:http://www.zuidaima.com/share/1772648445103104.htm
有两种流行Spring定时器配置:Java的Timer类和OpenSymphony的Quartz。
1.Java Timer定时
首先继承jav
- Linux下df与du两个命令的差别?
pda158
linux
一、df显示文件系统的使用情况,与du比較,就是更全盘化。 最经常使用的就是 df -T,显示文件系统的使用情况并显示文件系统的类型。 举比例如以下: [root@localhost ~]# df -T Filesystem Type &n
- [转]SQLite的工具类 ---- 通过反射把Cursor封装到VO对象
ctfzh
VOandroidsqlite反射Cursor
在写DAO层时,觉得从Cursor里一个一个的取出字段值再装到VO(值对象)里太麻烦了,就写了一个工具类,用到了反射,可以把查询记录的值装到对应的VO里,也可以生成该VO的List。
使用时需要注意:
考虑到Android的性能问题,VO没有使用Setter和Getter,而是直接用public的属性。
表中的字段名需要和VO的属性名一样,要是不一样就得在查询的SQL中
- 该学习笔记用到的Employee表
vipbooks
oraclesql工作
这是我在学习Oracle是用到的Employee表,在该笔记中用到的就是这张表,大家可以用它来学习和练习。
drop table Employee;
-- 员工信息表
create table Employee(
-- 员工编号
EmpNo number(3) primary key,
-- 姓