CNN卷积神经网络python——计算机视觉的基石
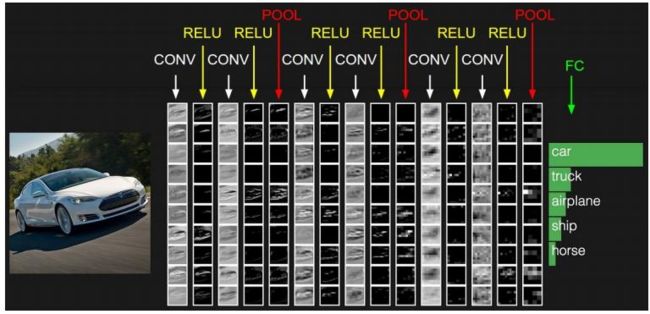
导读:神经网络接受输入图像/特征向量,并通过一系列隐藏层转换,然后使用非线性激活函数。每个隐藏层也由一组神经元组成,其中每个神经元都与前一层中的所有神经元完全连接。神经网络的最后一层(即“输出层”)也是全连接的,代表网络的最终输出分类。
Python人工智能系列学习资料获取和学习问题解答可以扫文末加V
CNN神经网络

一般卷积神经网络有如下结构:
•数据输入层/ Input layer
•卷积计算层/ CONV layer
•ReLU激励层 / ReLU layer
•池化层 / Pooling layer
•全连接层 / FC layer
当然卷积层,Relu激励层与Pooling层可以多次使用
输入层/ Input layer
该层要做的处理主要是对原始图像数据进行预处理,其中包括:
•去均值:把输入数据各个维度都中心化为0,如下图所示,其目的就是把样本的中心拉回到坐标系原点上。
•归一化:幅度归一化到同样的范围,如下所示,即减少各维度数据取值范围的差异而带来的干扰,比如,我们有两个维度的特征A和B,A范围是0到10,而B范围是0到10000,如果直接使用这两个特征是有问题的,好的做法就是归一化,即A和B的数据都变为0到1的范围。
•PCA/白化:用PCA降维;白化是对数据各个特征轴上的幅度归一化
卷积层
卷积层是卷积神经网络的核心构建块。这层参数由一组K 个可学习过滤器(即“内核”)组成,其中每个过滤器都有宽度和高度,并且几乎总是正方形。
对于 CNN 的输入,深度是图像中的通道数(即,处理 RGB 图像时深度为 3,每个通道一个)。对于网络中更深的卷积,深度将是前一层应用的过滤器数量。
为了让这个概念更清晰,让我们考虑 CNN 的前向传递,我们在输入体积的宽度和高度上对K 个滤波器中的每一个进行卷积。更简单地说,我们可以想象我们的K 个内核中的每一个都在输入区域上滑动,计算元素级乘法、求和,然后将输出值存储在二维激活图中。

左:在 CNN 的每个卷积层,有K 个内核。中间:K 个内核中的每一个都与输入进行了卷积。右图:每个内核产生一个 2D 输出,称为激活图。卷积过程可以参考下图
在将所有K 个过滤器应用于输入体积后,我们现在有K个二维激活图。然后我们沿着阵列的深度维度堆叠我们的K 个激活图,以形成最终的输出体积。
获得K个激活图后,将它们堆叠在一起,形成网络中下一层的输入。
因此,输出中的每一个都是一个神经元的输出,它只“观察”输入的一小部分区域。通过这种方式,神经网络“学习”过滤器,当它们在输入中的给定空间位置看到特定类型的特征时激活。在网络的较低层,当过滤器看到类似边缘或类似角落的区域时,它们可能会激活。
这里有三个参数控制输出体积的大小:depth、stride和zero-padding大小
depth
输出图像的深度。每个过滤器都会生成一个激活图,在K个内核的卷积中,激活图的深度将为K,或者只是我们在当前层中学习的过滤器的数量。
stride
考虑我们将卷积操作描述为在大矩阵上“滑动”一个小矩阵,在每个坐标处停止,计算元素乘法求和,然后存储输出。这个描述类似于一个滑动窗口,它从左到右、从上到下在图像上滑动。这里我们有一个 5 × 5 的输入图像和一个 3 × 3 的卷积内核。
使用S = 1,我们的内核从左到右和从上到下滑动,一次一个像素,产生以下输出(左图)。若使用S = 2的步幅,我们一次跳过两个像素(沿x轴的两个像素和沿y轴的两个像素),将会输出更少的数据量(下图)

左: 1 × 1 步长的卷积输出。右图: 2 × 2 步长的卷积输出
zero-padding
在应用卷积时,我们需要“填充”输入图像的边界以保留经过CNN卷积后的原始图像大小。使用zero-padding,我们可以沿着边界“填充”我们的输入图像,使得我们经过CNN后输出体积大小与我们的输入体积大小完全一样。我们应用的填充量由参数P控制。
为了可视化zero-padding,我们将 3 × 3 卷积内核应用于步长为S = 1的 5 × 5 输入图像
从上图中,我们可以看到卷积后的图片尺寸为3*3,如果我们改为设置P = 1,我们可以用零填充我们的输入图片(右)以创建一个 7 × 7 的图片尺寸,然后应用卷积操作,得到5*5的输出图片,这跟输入图片的尺寸大小完全一致。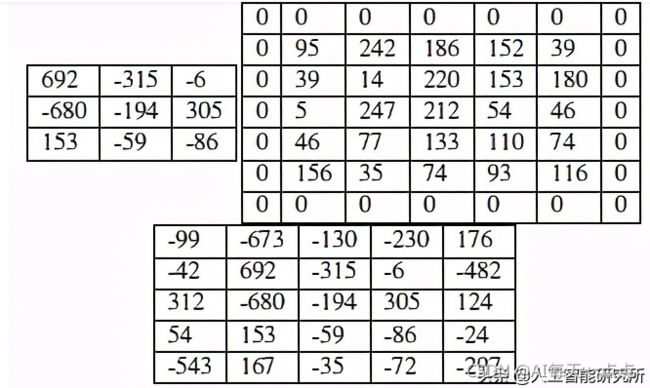
•ReLU激励层 / ReLU layer

左上角:阶跃函数。右上角: Sigmoid 激活函数。左中:双曲正切。中右: ReLU 激活(深度神经网络最常用的激活函数)。左下: Leaky ReLU,允许负数的 ReLU 变体。右下: ELU,ReLU 的另一种变体,其性能通常优于 Leaky ReLU。
CNN采用的激励函数一般为ReLU(The Rectified Linear Unit/修正线性单元),它的特点是收敛快,求梯度简单,但较脆弱,图像如下。
在输入图片进行CNN卷积后,通常我们需要使用激励函数对输出的图片数据进行激励,一般神经网络最常见的是ReLU激励函数,说白一点,此函数便是当小于0的数据全部替换成0,大于0的数据是y=x,直接是输入的值
此层接受大小为W input ×H input ×D input的输入图片,然后应用给定的激活函数。由于激活函数以元素方式应用,激活层的输出始终与输入维度相同,W input = W output,H input = H output,D input = D output。

激活函数
池化层 / Pooling layer
有两种方法可以减小输入图片的大小,CNN 以及pooling,常见的卷积神经网络的步骤为
输入 = >CNN = > RELU = >pooling= >CNN = > RELU = >pooling = > FC
池化层夹在连续的卷积层中间, 用于压缩数据和参数的量,减小过拟合。简而言之,如果输入是图像的话,那么池化层的最主要作用就是压缩图像。池化层用的方法有Max pooling 和 average pooling,而实际用得较多的是Max pooling。
通常我们使用 2 × 2的池大小,我们还将步幅设置为S = 1 或S = 2。下图应用最大池化的示例,其中池大小为 2 × 2,步幅为S = 1。每 2 × 2 块,我们只保留最大值,从而产生 3 × 3的输出体积大小。
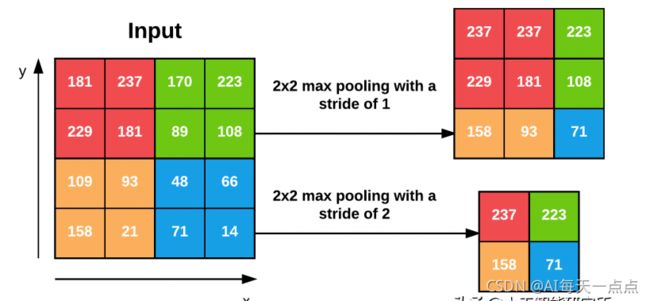
我们可以通过增加步幅来进一步减小输出体积的大小——这里我们将S = 2 应用于相同的输入。对于输入中的每个 2 × 2 块,我们只保留最大值,然后以两个像素为步长,再次应用该操作,我们得到2*2的输出图片大小。
全连接层
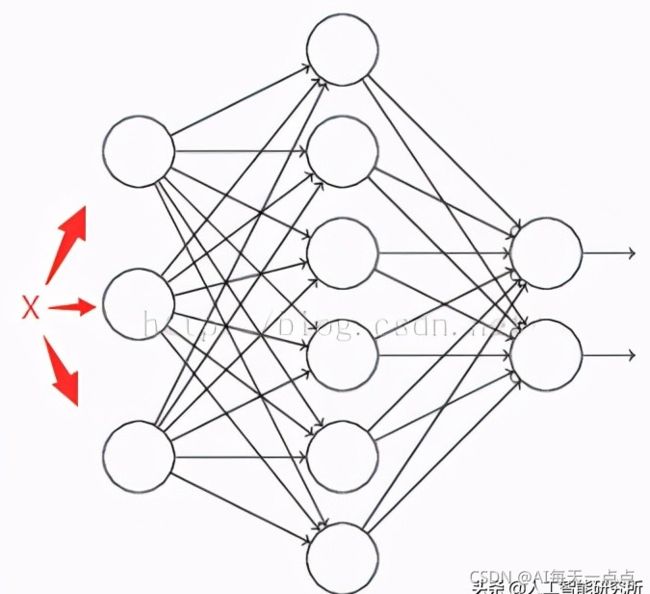
深度神经网络的最后一层往往是全连接层+Softmax(分类网络),如下图所示

全连接层将权重矩阵与输入向量相乘再加上偏置,将n个(−∞,+∞)的实数映射为K个(−∞,+∞)的实数(分数);Softmax将K个(−∞,+∞)的实数映射为K个(0,1)的实数(概率),同时保证它们之和为1。具体如下:

其中,x为全连接层的输入,Wn*K为权重,b为偏置,y^为Softmax输出的概率,Softmax的计算方式如下:

dropout
Dropout 实际上是一种正则化形式,旨在通过提高测试准确性来帮助防止过度拟合,可能会以牺牲训练准确性为代价。对于我们训练集中的每个小批量,dropout 层以概率p随机断开网络架构中从前一层到下一层的输入。
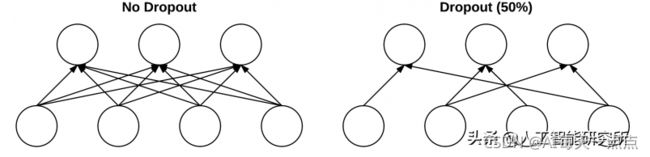
我们应用 dropout 的原因是通过在训练时,改变网络架构来减少过拟合

如上图:图中黑色曲线是正常模型,绿色曲线就是overfitting模型。尽管绿色曲线很精确地区分了所有的训练数据,但是并没有描述数据的整体特征,对新测试数据的适应性较差,且训练模型太复杂,后期的训练数据会很庞大。
假设有一个神经网络:
按照之前的方法,根据输入X,先正向更新神经网络,得到输出值,然后反向根据backpropagation算法来更新权重和偏向。而Dropout不同的是,
1)在开始,随机删除掉隐藏层一半的神经元,如图,虚线部分为开始时随机删除的神经元:
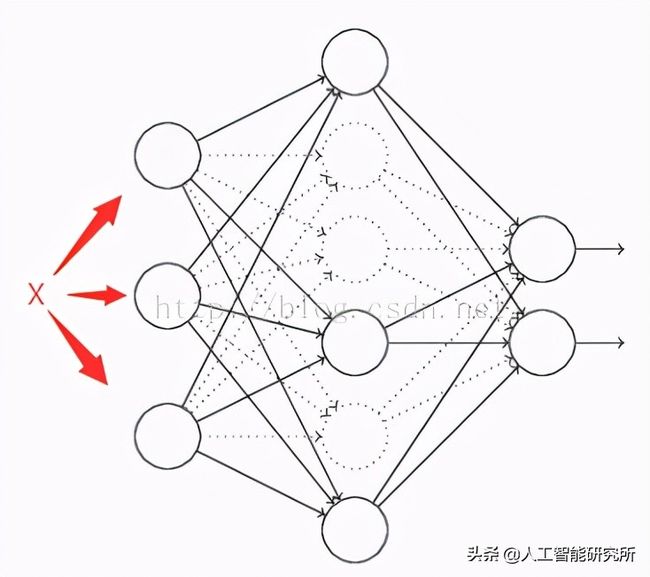
2)然后,在删除后的剩下一半的神经元上正向和反向更新权重和偏差;
3)再恢复之前删除的神经元,再重新随机删除一半的神经元,进行正向和反向更新w和b;
4)重复上述过程。
Python人工智能系列学习资料获取和学习问题解答扫码加微(更方便)
还有200G的人工智能资源包无任何套路免费提供,也可以进人工智能技术交流群:966367816