凸优化理论基础1--仿射集
作者简介:秃头小苏,致力于用最通俗的语言描述问题
往期回顾:基于pytorch搭建VGGNet神经网络用于花类识别 基于pytorch搭建AlexNet神经网络用于花类识别
近期目标:拥有5000粉丝
支持小苏:点赞、收藏⭐、留言
文章目录
- 凸优化理论基础1——仿射集
-
- 直线和线段
- 仿射集
- 仿射组合
- 仿射集的子空间
- 仿射包
凸优化理论基础1——仿射集
最近上的数学课着实让人头大,课上听不懂,只能下课慢慢的消化知识凸优化可以说是直接当头一棒,第一节就完全跟不上节奏,甚至于一些基本的概念都理解不了,这样雪球越滚越大,这门课就算是荒废了
若是你和我有一样的尴尬处境,那么这篇文章或许能帮助到你。这一节我打算从一些基础的概念讲起,只有先对这些概率了如指掌,后面才能学的自在✈✈✈现在就让我们一起来看看叭
直线和线段
大家先别喷⛲⛲⛲有人想,我堂堂一位受过高等教育的大学生,你竟然给我讲直线和线段,这不是侮辱还是侮辱啊我们之前学过的直线大多是形如y=kx+b的形式,那么这里我们定义直线的表达式如下:
设 x 1 ≠ x 2 {{\rm{x}}_1} \ne {x_2} x1=x2为 R n {R^n} Rn空间中的两个点,那么具有下列形式的点
y = θ x 1 + ( 1 − θ ) x 2 , θ ∈ R y = \theta {x_1} + (1 - \theta ){x_2},\theta \in R y=θx1+(1−θ)x2,θ∈R
会组成一条穿越 x 1 x_1 x1和 x 2 x_2 x2的直线。乍一看这个公式我是懵逼的,这也是直线的方程!!!?这样我们将这个式子换一种表达方式,即把括号拆开再重新组合,如下:
y = x 2 + θ ( x 1 − x 2 ) , θ ∈ R y = {x_2} + \theta ({x_1} - {x_2}),\theta \in R y=x2+θ(x1−x2),θ∈R
那么上式该怎么解释呢? θ ( x 1 − x 2 ) \theta(x_1-x_2) θ(x1−x2)表示方向从 x 2 x_2 x2指向 x 1 x_1 x1,大小由 θ \theta θ控制,则y表示基点 x 2 x_2 x2和方向 x 1 − x 2 x_1-x_2 x1−x2乘以参数 θ \theta θ的和。当 θ = 0 \theta=0 θ=0时,y在 x 2 x_2 x2点处;当 θ = 1 \theta=1 θ=1时,y在 x 1 x_1 x1点处。 θ \theta θ取不同的值,y对应于不同的值,这样y就可以取遍 x 1 、 x 2 x_1 、x_2 x1、x2所在直线上的所有点,即y表示过 x 1 、 x 2 x_1 、x_2 x1、x2两点的直线。这里给出图示方便大家理解:

既然我们都已经知道了直线的表达方式,那么线段就很容易了,我们只要限定 θ ∈ [ 0 , 1 ] \theta \in [0,1] θ∈[0,1]即可将y限制在 x 1 和 x 2 x_1和x_2 x1和x2之间,也即形成了线段,其公式如下:
y = θ x 1 + ( 1 − θ ) x 2 , θ ∈ [ 0 , 1 ] y = \theta {x_1} + (1 - \theta ){x_2},\theta \in [0,1] y=θx1+(1−θ)x2,θ∈[0,1]
仿射集
- 定义
先来给出仿射集的定义:如果通过集合 C ∈ R n C\in R^n C∈Rn中任意两个不同点的直线仍然在集合C中,那么称集合C是仿射的。 由于我们前面已经给出了直线的表达式,因此这里 C ∈ R n C\in R^n C∈Rn是仿射集可以等价为 ⇔ \Leftrightarrow ⇔对任意的 x 1 , x 2 ∈ C x_1,x_2 \in C x1,x2∈C 及 θ ∈ R \theta \in R θ∈R 有 θ x 1 + ( 1 − θ ) x 2 ∈ C \theta {x_1} + (1 - \theta ){x_2} \in C θx1+(1−θ)x2∈C 。 换而言之,C包含了C中任意两点的系数之和为1的线性组合。
- 仿射集例子
直线、空集、点、全空间。【个人感觉只要直线会有一点研究价值,按照定义来说空集和点是仿射集我觉得是有点牵强的】
仿射组合
上文谈到仿射集的概率,这是针对两个点的,其实这个概念可以推广到多个点上。即如果 θ 1 + ⋯ + θ k = 1 \theta_1 + \cdots +\theta_k=1 θ1+⋯+θk=1,我们即称 θ 1 x 1 + ⋯ + θ k x k \theta_1x_1 + \cdots +\theta_kx_k θ1x1+⋯+θkxk形式的点为 x 1 , ⋯ , x k x_1 , \cdots ,x_k x1,⋯,xk的仿射组合。
我们通过仿射集的定义可以得出结论:一个仿射集包含任意点的仿射组合,即若C是一个仿射集合, x 1 , ⋯ , x k ∈ C x_1 , \cdots ,x_k \in C x1,⋯,xk∈C,且 θ 1 + ⋯ + θ k = 1 \theta_1 + \cdots +\theta_k=1 θ1+⋯+θk=1,则 θ 1 x 1 + ⋯ + θ k x k \theta_1x_1 + \cdots +\theta_kx_k θ1x1+⋯+θkxk仍然在C中。
这里我们做一个简要的证明,证明含3个点的仿射组合仍然在C中,证明如下:
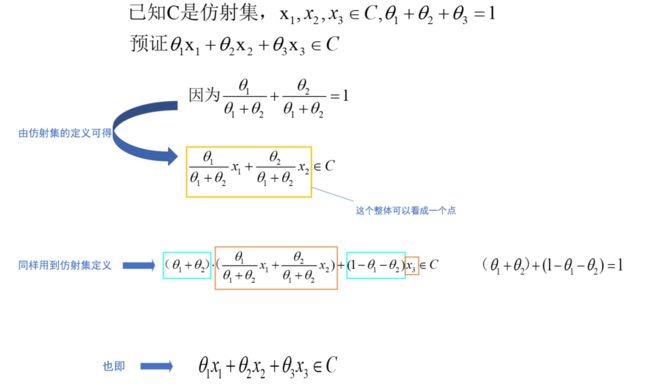
证明了仿射集C中的三个点的仿射组合仍然在C中,那么就可进一步证明仿射集中包含任意点的仿射组合仍在仿射集中。
仿射集的子空间
定义:若C是仿射集并且 x 0 ∈ C x_0 \in C x0∈C,则集合
V = C − x 0 = { x − x 0 ∣ x ∈ C } V=C-x_0=\{x-x_0|x \in C \} V=C−x0={x−x0∣x∈C}
定义为仿射集C的一个子空间。
这里还给出一个结论,即仿射集C的子空间V也是仿射的,证明如下:
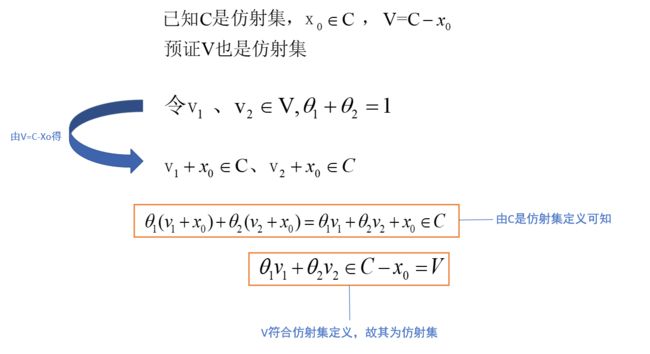
此外,仿射集的子空间关于加法和数乘是封闭的,即指子空间V中的点经过加法和数乘运算后仍然属于子空间V,证明如下:
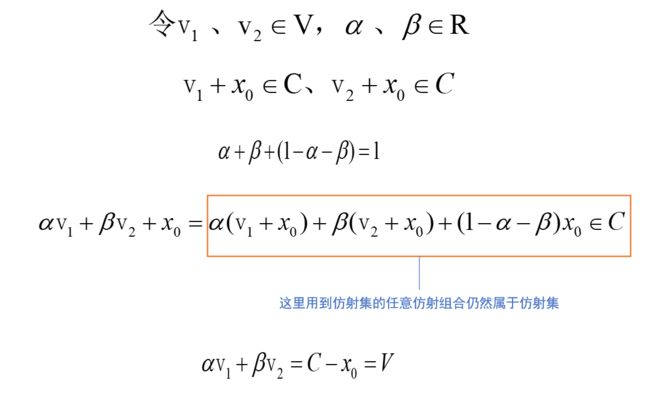
子空间相当于是基 x 0 x_0 x0 做了一个平移,使之必过原点,子空间是仿射集。具体可参考视频:https://www.bilibili.com/video/BV1Xi4y1b7eF/?spm_id_from=333.788.recommend_more_video.-1
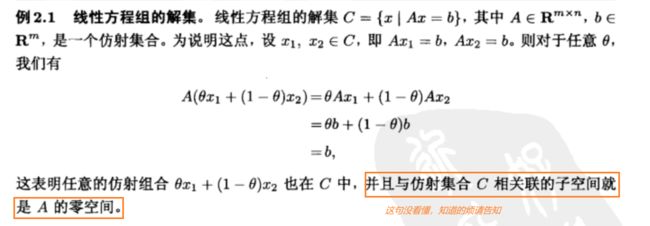
讲了这么多,我们先来看一个例题进行巩固,如下:
仿射包
这个我不想再给出定义了,估计大家也都看烦了,那什么是仿射包呢?其实很容易理解,仿射包就是包含集和C的最小的仿射集。 这里我举几个例子大家可能就明白了
- 集合C为2点,那么仿射包就是过这两点的直线
- 集合C为3点,那么仿射包就是包括这三点的全平面
- 集合C为4点,那么仿射包就是包括这四点的全空间
- 仿射集的仿射包是它自身
如若文章对你有所帮助,那就
咻咻咻咻~~duang~~点个赞呗