经典算法研究系列:二之续、彻底理解Dijkstra算法
经典算法研究系列:二之续、彻底理解Dijkstra算法
作者:July 二零一一年二月十三日。
参考代码:introduction to algorithms,Second Edition。
---------------------------------------
了解什么是Dijkstra 算法,请参考:
经典算法研究系列:二、Dijkstra 算法初探
http://blog.csdn.net/v_JULY_v/archive/2010/12/24/6096981.aspx
本文由单源最短路径路径问题开始,而后描述Bellman-Ford算法,到具体阐述Dijkstra算法,
阐述详细剖析Dijkstra算法的每一个步骤,教你彻底理解此Dijkstra算法。
一、单源最短路径问题
我们知道,单源最短路径问题:已知图G=(V,E),要求找出从某个定源顶点s<-V,到每个v<-V的最短路径。
简单来说,就是一个图G中,找到一个定点s,然后以s为起点,要求找出s到图G中其余各个点的最短距离或路径。
此单源最短路径问题有以下几个变形:
I、 单终点最短路径问题:
每个顶点v到指定终点t的最短路径问题。即单源最短路径问题的相对问题。
II、 单对顶点最短路径问题:
给定顶点u和v,找出从u到v的一条最短路径。
III、每对顶点间最短路径问题:
针对任意每俩个顶点u和v,找出从u到v的最短路径。
最简单的想法是,将每个顶点作为源点,运行一次单源算法即可以解决这个问题。
当然,还有更好的办法,日后在本BOlG内阐述。
二、Bellman-Ford 算法
1、回路问题
一条最短路径不能包含负权回路,也不能包含正权回路。
一些最短路径的算法,如Dijkstra 算法,要求图中所有的边的权值都是非负的,如在公路地图上,找一条从定点s到目的顶点v的最短路径问题。
2、Bellman-Ford 算法
而Bellman-Ford 算法,则允许输入图中存在负权边,只要不存在从源点可达的负权回路,即可。
简单的说,图中可以存在负权边,但此条负权边,构不成负权回路,不影响回路的形成。
且,Bellman-Ford 算法本身,便是可判断图中是否存在从源点可达的负权回路,
若存在负权回路,算法返回FALSE,若不存在,返回TRUE。
Bellman-Ford 算法的具体描述
BELLMAN-FORD(G, w, s)
1 INITIALIZE-SINGLE-SOURCE(G, s) //对每个顶点初始化 ,O(V)
2 for i ← 1 to |V[G]| - 1
3 do for each edge (u, v) ∈ E[G]
4 do RELAX(u, v, w) //针对每个顶点(V-1个),都运用松弛技术O(E),计为O((v-1)*E))
5 for each edge (u, v) ∈ E[G]
6 do if d[v] > d[u] + w(u, v)
7 then return FALSE //检测图中每条边,判断是否包含负权回路,
//若d[v]>d[u]+w(u,v),则表示包含,返回FALSE,
8 return TRUE //不包含负权回路,返回TRUE
Bellman-Ford 算法的时间复杂度,由上可得为O(V*E)。
3、关于判断图中是否包含负权回路的问题:
根据定理,我们假定,u是v的父辈,或父母,那么
当G(V,E)是一个有向图或无向图(且不包含任何负权回路),s<-V,s为G的任意一个顶点,则对任意边(u,v)<-V,有
d[s,v] <= d[s,u]+1
此定理的详细证明,可参考算法导论一书上,第22章中引理22.1的证明。
或者根据第24章中通过三角不等式论证Bellman-Ford算法的正确性,也可得出上述定理的变形。
即假设图G中不包含负权回路,可证得
d[v]=$(s,u)
<=$(s,u)+w(u,v) //根据三角不等式
=d[u]+w[u,v]
所以,在不包含负权回路的图中,是可以得出d[v]<=d[u]+w(u,v)。
于是,就不难理解,在上述Bellman-Ford 算法中,
if d[v] > d[u]+w(u,v),=> 包含负权回路,返回FASLE
else if =>不包含负权回路,返回TRUE。
ok,咱们,接下来,立马切入Dijkstra 算法。
三、深入浅出,彻底解剖Dijkstra 算法
I、松弛技术RELAX的介绍
Dijkstra 算法使用了松弛技术,对每个顶点v<-V,都设置一个属性d[v],用来描述从源点s到v的最短路径上权值的上界,
称为最短路径的估计。
首先,得用O(V)的时间,来对最短路径的估计,和对前驱进行初始化工作。
INITIALIZE-SINGLE-SOURCE(G, s)
1 for each vertex v ∈ V[G]
2 do d[v] ← ∞
3 π[v] ← NIL //O(V)
4 d[s] 0
RELAX(u, v, w)
1 if d[v] > d[u] + w(u, v)
2 then d[v] ← d[u] + w(u, v)
3 π[v] ← u //O(E)
图。
II、Dijkstra 算法
此Dijkstra 算法分三个步骤,
INSERT (第3行), EXTRACT-MIN (第5行), 和DECREASE-KEY(第8行的RELAX,调用此减小关键字的操作)。
DIJKSTRA(G, w, s)
1 INITIALIZE-SINGLE-SOURCE(G, s) //对每个顶点初始化 ,O(V)
2 S ← Ø
3 Q ← V[G] //INSERT,O(1)
4 while Q ≠ Ø
5 do u ← EXTRACT-MIN(Q) //简单的O(V*V);二叉/项堆,和FIB-HEAP的话,则都为O(V*lgV)。
6 S ← S ∪{u}
7 for each vertex v ∈ Adj[u]
8 do RELAX(u, v, w) //简单方式:O(E),二叉/项堆,E*O(lgV),FIB-HEAP,E*O(1)。
四、Dijkstra 算法的运行时间
在继续阐述之前,得先声明一个问题,DIJKSTRA(G,w,s)算法中的第5行,EXTRACT-MIN(Q),最小优先队列的具体实现。
而Dijkstra 算法的运行时间,则与此最小优先队列的采取何种具体实现,有关。
最小优先队列三种实现方法:
1、利用从1至|V| 编好号的顶点,简单地将每一个d[v]存入一个数组中对应的第v项,
如上述DIJKSTRA(G,w,s)所示,Dijkstra 算法的运行时间为O(V^2+E)。
2、如果是二叉/项堆实现最小优先队列的话,EXTRACT-MIN(Q)的运行时间为O(V*lgV),
所以,Dijkstra 算法的运行时间为O(V*lgV+E*lgV),
若所有顶点都是从源点可达的话,O((V+E)*lgV)=O(E*lgV)。
当是稀疏图时,则E=O(V^2/lgV),此Dijkstra 算法的运行时间为O(V^2)。
3、采用斐波那契堆实现最小优先队列的话,EXTRACT-MIN(Q)的运行时间为O(V*lgV),
所以,此Dijkstra 算法的运行时间即为O(V*lgV+E)。
综上所述,此最小优先队列的三种实现方法比较如下:
EXTRACT-MIN + RELAX
I、 简单方式: O(V*V + E*1)
II、 二叉/项堆: O(V*lgV + |E|*lgV)
源点可达:O(E*lgV)
稀疏图时,有E=o(V^2/lgV),
=> O(V^2)
III、斐波那契堆:O(V*lgV + E)
当|V|<<|E|时,采用DIJKSTRA(G,w,s)+ FIB-HEAP-EXTRACT-MIN(Q),即斐波那契堆实现最小优先队列的话,
优势就体现出来了。
五、Dijkstra 算法 + FIB-HEAP-EXTRACT-MIN(H),斐波那契堆实现最小优先队列
由以上内容,我们已经知道,用斐波那契堆来实现最小优先队列,可以将运行时间提升到O(VlgV+E)。
|V|个EXTRACT-MIN 操作,每个平摊代价为O(lgV),|E|个DECREASE-KEY操作的每个平摊时间为O(1)。
下面,重点阐述DIJKSTRA(G, w, s)中,斐波那契堆实现最小优先队列的操作。
由上,我们已经知道,DIJKSTRA算法包含以下的三个步骤:
INSERT (第3行), EXTRACT-MIN (第5行), 和DECREASE-KEY(第8行的RELAX)。
先直接给出Dijkstra 算法 + FIB-HEAP-EXTRACT-MIN(H)的算法:
DIJKSTRA(G, w, s)
1 INITIALIZE-SINGLE-SOURCE(G, s)
2 S ← Ø
3 Q ← V[G] //第3行,INSERT操作,O(1)
4 while Q ≠ Ø
5 do u ← EXTRACT-MIN(Q) //第5行,EXTRACT-MIN操作,V*lgV
6 S ← S ∪{u}
7 for each vertex v ∈ Adj[u]
8 do RELAX(u, v, w) //第8行,RELAX操作,E*O(1)
FIB-HEAP-EXTRACT-MIN(H) //平摊代价为O(lgV)
1 z ← min[H]
2 if z ≠ NIL
3 then for each child x of z
4 do add x to the root list of H
5 p[x] ← NIL
6 remove z from the root list of H
7 if z = right[z]
8 then min[H] ← NIL
9 else min[H] ← right[z]
10 CONSOLIDATE(H)
11 n[H] ← n[H] - 1
12 return z
--------------------------------------------------------------------------------------
六、Dijkstra 算法 +fibonacci堆各项步骤的具体分析
ok,接下来,具体分步骤阐述以上各个操作:
第3行的INSERT操作:
FIB-HEAP-INSERT(H, x) //平摊代价,O(1).
1 degree[x] ← 0
2 p[x] ← NIL
3 child[x] ← NIL
4 left[x] ← x
5 right[x] ← x
6 mark[x] ← FALSE
7 concatenate the root list containing x with root list H
8 if min[H] = NIL or key[x] < key[min[H]]
9 then min[H] ← x
10 n[H] ← n[H] + 1
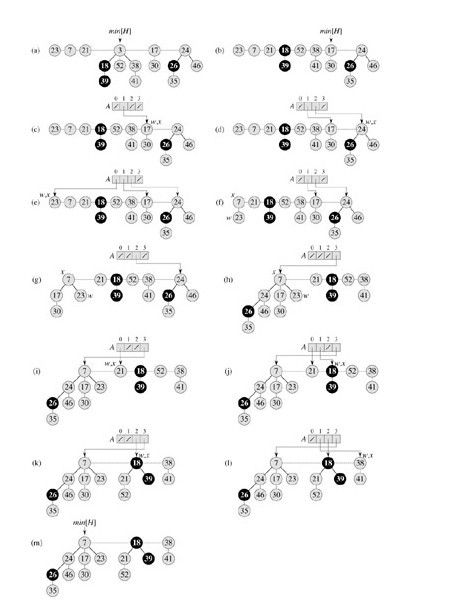
第5行的EXTRACT-MIN操作:
FIB-HEAP-EXTRACT-MIN(H) //平摊代价为O(lgV)
1 z ← min[H]
2 if z ≠ NIL
3 then for each child x of z
4 do add x to the root list of H
5 p[x] ← NIL
6 remove z from the root list of H
7 if z = right[z]
8 then min[H] ← NIL
9 else min[H] ← right[z]
10 CONSOLIDATE(H) //CONSOLIDATE算法在下面,给出。
11 n[H] ← n[H] - 1
12 return z
下图是FIB-HEAP-EXTRACT-MIN 的过程示意图:
CONSOLIDATE(H)
1 for i ← 0 to D(n[H])
2 do A[i] ← NIL
3 for each node w in the root list of H
4 do x ← w
5 d ← degree[x] //子女数
6 while A[d] ≠ NIL
7 do y ← A[d]
8 if key[x] > key[y]
9 then exchange x <-> y
10 FIB-HEAP-LINK(H, y, x) //下面给出。
11 A[d] ← NIL
12 d ← d + 1
13 A[d] ← x
14 min[H] ← NIL
15 for i ← 0 to D(n[H])
16 do if A[i] ≠ NIL
17 then add A[i] to the root list of H
18 if min[H] = NIL or key[A[i]] < key[min[H]]
19 then min[H] ← A[i]
FIB-HEAP-LINK(H, y, x) //y链接至 x。
1 remove y from the root list of H
2 make y a child of x, incrementing degree[x]
3 mark[y] ← FALSE
第8行的RELAX的操作,已上已经给出:
RELAX(u, v, w)
1 if d[v] > d[u] + w(u, v)
2 then d[v] ← d[u] + w(u, v)
3 π[v] ← u //O(E)
一般来说,在Dijkstra 算法中,DECREASE-KEY的调用次数远多于EXTRACT-MIN的调用,
所以在不增加EXTRACT-MIN 操作的平摊时间前提下,尽量减小DECREASE-KEY操作的平摊时间,都能获得对比二叉堆更快的实现。
以下,是二叉堆,二项堆,斐波那契堆的各项操作的时间复杂度的比较:
操作 二叉堆(最坏) 二项堆(最坏) 斐波那契堆(平摊)
__________________________________
MAKE-HEAP Θ(1) Θ(1) Θ(1)
INSERT Θ(lg n) O(lg n) Θ(1)
MINIMUM Θ(1) O(lg n) Θ(1)
EXTRACT-MIN Θ(lg n) Θ(lg n) O(lg n)
UNION Θ(n) O(lg n) Θ(1)
DECREASE-KEY Θ(lg n) Θ(lg n) Θ(1)
DELETE Θ(lg n) Θ(lg n) O(lg n)
斐波那契堆,日后会在本BLOG内,更进一步的深入与具体阐述。
且同时,此文,会不断的加深与扩展。
完。
本人July对本博客所有任何文章、内容和资料享有版权。
转载务必注明作者本人及出处,并通知本人。谢谢。
July、二零一一年二月十三日。