强化学习实验环境 I (MuJoCo, OpenAI Gym, rllab, DeepMind Lab, TORCS, PySC2)
转载:http://blog.csdn.net/jinzhuojun/article/details/77144590
和其它的机器学习方向一样,强化学习(Reinforcement Learning)也有一些经典的实验场景,像Mountain-Car,Cart-Pole等。话说很久以前,因为没有统一的开发测试平台,大家都会自己实现,有用C/C++的,有用Python,还有用Matlab的。所以大家论文中看到的场景虽然相似,但很多时候不完全一样。这样一方面重新造轮子,另一方面还有可能因为实验环境的差别影响结果的比较。于是后面大家渐渐开始建立统一的实验平台,另一方面,由于近年来深度强化学习(Deep Reinforcement Learning)的兴起,各种新的更复杂的实验场景也在不断涌现。于是出现了OpenAI Gym,MuJoCo,rllab, DeepMind Lab, TORCS, PySC2等一系列优秀的平台。你会在大量的强化学习相关论文中看到它们的身影。下面就简单介绍下这些平台在Ubuntu下的搭建过程。关于一些基础环境(如Cuda, Anaconda, TensorFlow)的搭建可参考前面的文章:http://blog.csdn.net/jinzhuojun/article/details/77140806。
MuJoCo
MuJoCo(Multi-Joint dynamics with Contact)是一个物理模拟器,可以用于机器人控制优化等研究。官方网站为http://www.mujoco.org/index.html。最新版本为1.50。下载地址为https://www.roboti.us/index.html。如果是Linux系统可以点mjpro150 linux。下载完成后解压到~/.mujoco下。注意要用是需要license的,可以在https://www.roboti.us/license.html上申请试用版30天免费license。先下载网站上提供的getid_linux,加执行权限在本地运行得到机器id连同其它信息填到申请页面,提交后会收到邮件包含key文件mjkey.txt。下载key文件后,放到~/.mujoco目录下。之后可以运行解压目录下bin里的simulate试下是否正常(需要将key文件也拷到simulate同级目录)。运行后将model目录下的模型拖入窗口,会看到类似下面的输出:
OpenAI对MuJoCo引擎做了Python 3的binding-mujoco-py,源码位于https://github.com/openai/mujoco-py。按readme中你可以通过下面命令安装:
pip3 install -U 'mujoco-py<1.50.2,>=1.50.1'sh: 2: Syntax error: "(" unexpected
ERROR: Invalid activation key
你可以下载源码安装:
git clone https://github.com/openai/mujoco-py
cd mujoco-py
pip install -e . --no-cacheOpenAI Gym
OpenAI Gym是OpenAI出的研究强化学习算法的toolkit,它里边cover的场景非常多,从经典的Cart-Pole, Mountain-Car到Atar,Go,MuJoCo都有。官方网站为https://gym.openai.com/,源码位于https://github.com/openai/gym,它的readme提供了安装和运行示例,按其中的安装方法:最小安装:
git clone https://github.com/openai/gym.git
cd gym
pip install -e .apt-get install -y python-numpy python-dev cmake zlib1g-dev libjpeg-dev xvfb libav-tools xorg-dev python-opengl libboost-all-dev libsdl2-dev swig Pillow libglfw3-dev
pip install -e '.[all]'



通过源码下的examples/scripts/list_envs可以列出所有支持的场景。
如果装了Anaconda,过程中出现下面错误的话:
OSError: /home/jzj/anaconda2/envs/py35/bin/../lib/libstdc++.so.6: version `GLIBCXX_3.4.20' not found (required by /home/jzj/anaconda2/envs/py35/lib/python3.5/site-packages/atari_py/ale_interface/build/libale_c.so)
可以通过在Anaconda环境中安装libgcc解决:
conda install libgcc如果在运行依赖Box2d引擎的sample时出现下面错误:
AttributeError: module 'Box2D._Box2D' has no attribute 'RAND_LIMIT'
可以先uninstall已有版本(如有),然后安装pybox2d:
pip uninstall Box2D-kengz
git clone https://github.com/pybox2d/pybox2d.git
cd pybox2d
python setup.py clean
python setup.py installGym中也可以通过mujoco-py集成MuJoCo。如果出现下面错误,说明mujoco-py版本不对。目前Gym中支持MuJoCo 1.31和mujoco-py 0.5。按前面说明装上相应版本后即可。
DependencyNotInstalled: No module named 'mujoco_py.mjlib'. (HINT: you need to install mujoco_py, and also perform the setup instructions here: https://github.com/openai/mujoco-py/.)
rllab
和OpenAI Gym类似,rllab也是一个研究强化学习算法的框架。官方网站为https://github.com/openai/rllab。官方支持python 3.5+,基于Theano。与OpenAI Gym的区别在于OpenAI Gym支持更广泛的环境,且提供在线的scoreboard可以用于共享训练结果。rllab自己也提供一个基于pygame的可视环境,同时它也可兼容OpenAI Gym。除此之外,它提供了一些强化学习算法的实现,这些参考实现和一些组件可以使得强化学习算法的开发更快上手。安装步骤可按照官方网站:https://rllab.readthedocs.io/en/latest/user/installation.html。export PYTHONPATH=path_to_rllab:$PYTHONPATH
./scripts/setup_linux.sh./scripts/setup_mujoco.shsource activate rllab3python examples/trpo_gym_cartpole.py这些sample中默认是无UI的,如果要有UI,可以搜索其中的plot=True,将之反注释即可。
如果你很和我一样穷,用的是贫民版GPU,加速时分不出memory的话:
RuntimeError: Cuda error: kernel_reduce_ccontig_node_m28488bfe450723ef20f18edd8e611eb0_0: out of memory. (grid: 1 x 1; block: 256 x 1 x 1)
可以退一步让Theano用纯CPU跑:
export THEANO_FLAGS=device=cpuDeepMind Lab
DeepMind Lab(原Labyrinth)是由DeepMind发布的3D迷宫场景强化学习平台。之前是DeepMind内部使用的,后来开源了。官方介绍https://deepmind.com/blog/open-sourcing-deepmind-lab/。论文 https://arxiv.org/pdf/1612.03801.pdf。源码位于https://github.com/deepmind/lab。最好在Python 2.7环境下编译运行。比如用Anaconda创建Python 2.7环境并进入:
conda create --name py27 python=2.7
source activate py27sudo apt-get install lua5.1 liblua5.1-0-dev libffi-dev gettext freeglut3-dev libsdl2-dev libosmesa6-dev python-dev python-numpy realpath
git clone https://github.com/deepmind/lab
cd lab
bazel build :deepmind_lab.so --define headless=glx
bazel run :python_module_test --define headless=glxImportError: cannot import name multiarray
表面上是缺少numpy,可以先看下numpy有没有装,没有的话可以用conda install numpy安装。如果装了有可能是串到~/.local或者/usr/lib/下的python package了(可以通过python -c "import sys; from pprint import pprint as p; p(sys.path)"检查)。简单点的方法就是将除了Anaconda环境下的numpy删除。
sudo apt-get remove python-numpy
sudo ~/.local/bin/pip2.7 uninstall numpy接下来,按readme说明,通过下面命令可以分别跑agent玩家和人类玩家的迷宫场景:
bazel run :random_agent --define headless=false -- --length=10000 --width=640 --height=480
bazel run :game -- --level_script tests/demo_map
然后通过python api(https://github.com/deepmind/lab/blob/master/docs/python_api.md)就可以让强化学习算法利用该环境进行训练了。
TORCS
TORCS(The Open Racing Car Simulator)是一个跨平台的赛车游戏模拟器,也可作为强化学习的研究平台。官方网站:http://torcs.sourceforge.net/。但我们不需直接从官网下。gym_torcs是一个TORCS的强化学习环境,提供类似前面OpenAI Gym的接口,网站为https://github.com/ugo-nama-kun/gym_torcs。假设已安装了上面提到的OpenAI Gym。还需要安装依赖:
sudo apt-get install xautomationsource activate py35下载源码:
git clone https://github.com/ugo-nama-kun/gym_torcs.gitpython example_experiment.py 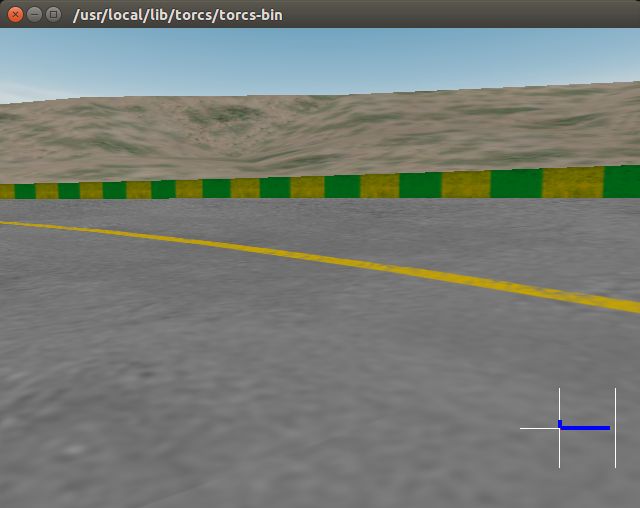
ps:截图还是用了默认分辨率,因为64x64太小看不清。
Readme中的Simple How-To示例了如何在Python中与该环境交互,然后就可以开发测试强化学习算法了。网上有个实现DDPG算法的例子可以参考:https://yanpanlau.github.io/2016/10/11/Torcs-Keras.html
PySC2(StarCraft II)
DeepMind的AlphaGo把围棋搞定之后,业界开始把目光投向即时策略游戏,如StarCraft II(星际争霸II)。最近DeepMind和Blizzard合作出了个StarCraft II的研究平台,称为PySC2。介绍网站:https://deepmind.com/blog/deepmind-and-blizzard-open-starcraft-ii-ai-research-environment/。论文:https://deepmind.com/documents/110/sc2le.pdf。PySC2是基于Blizzard的StarCraft II Machine Learning API(https://github.com/Blizzard/s2client-proto)的Python下强化学习环境。源码位于:https://github.com/deepmind/pysc2 。按照readme最简单的安装方法就是:
pip install pysc2python -m pysc2.bin.agent --map Simple64
python -m pysc2.bin.play --map Simple64
OpenAI Baselines
严格来说它本身不是一个开发环境。它是OpenAI出的一些深度强化学习算法(DQN, PPO, TRPO, DDPG)的实现,基于TensorFlow和OpenAI Gym,最新版需要Python 3。源码位于:https://github.com/openai/baselines。按readme中使用下面命令安装:
pip install baselinesgit clone https://github.com/openai/baselines
cd baselines
python setup.py installconda install Pillow atari-py另外如果用GPU加速但不幸碰到memory分不出的情况(CUDA_OUT_OF_MEMORY),可以强制TensorFlow使用CPU:
export CUDA_VISIBLE_DEVICES=""-------------------------------------------------
欢迎关注微信公众号:AITBOOK