智能驾驶传感器的工作原理
一、摄像头
自动驾驶核心传感器,实现自动驾驶众多规划、控制的基础,相比激光雷达和毫米波雷达。
优势:识别车辆周边的环境信息和纹理信息,能看到目标类型、信号灯颜色等,类似于人类眼睛。
摄像头的应用
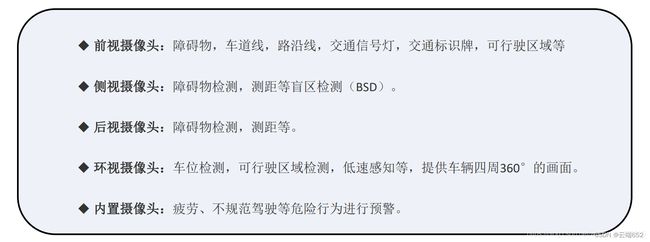
根据安装位置:分为前视、侧视、后视、内置、环视等。在高级自动驾驶车辆上,配置的摄像头有多个甚至十多个。例如特斯拉
性能要求
1、耐高温:车载摄像头在-40°——85°范围内都能正常工作
2、抗震:车辆在路面行驶时会产生较强的震动
3、防水:车辆防水
4、使用寿命至少10年
5、高动态低噪点:光线环境变化剧烈且频繁时、要求摄像头具有高动态性;光线较暗时,具有抑制噪点的产生。
6、对于某些特定功能的摄像头、需要水平视场角比较广。
摄像头优劣势
对比毫米波雷达、摄像头能够对目标类别进行识别,对车道线、红绿灯、交通标志准确的识别,同时还能够检测出车辆行驶的安全边界,对横向移动的目标具有很强的探测能力。
二、雷达
获取位置信息、激光信号的反射率可以区分目标物资的不同材质,激光雷达的线束越多、其测量精度越高。由于激光的频率高、波长短,可以获得极高的角度、距离和速度分辨率。
工作原理
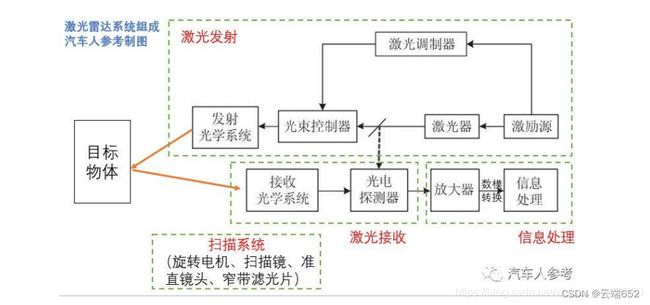
激光雷达一般包括发射系统、接收系统、信息处理三大部分组成,部分激光还包括扫描系统
激光雷达是向目标发射激光探测信号束,然后将收到的从目标反射回来的信号(目标回波)与发射信号进行比较,测量发射信号与接收信号地时间差或者相位差,获得目标的距离信息,然后通过水平旋转扫描来测量角度,建立二维极坐标系,然后通过不同的俯仰角度信息,获得目标的高度信息等,从而完成对目标的探测、跟踪、识别。
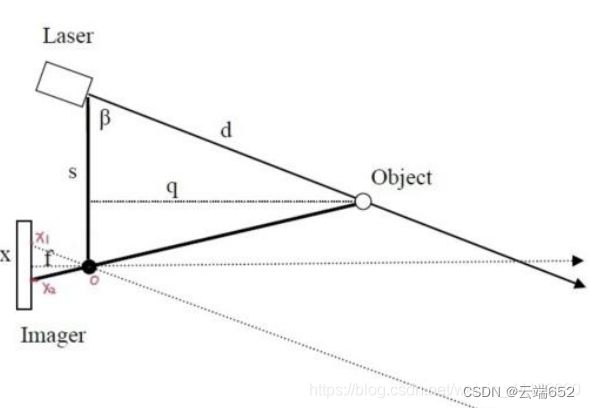
激光雷达的测距有两种,一种是基于时间的测量方法——飞行时间法,另一种是不基于时间的测距法。
基于时间的测量方法分为:脉冲法和三角法。
脉冲法,称为直接法,数学模型: 距离=光速*往返时间/2
激光雷达的特性
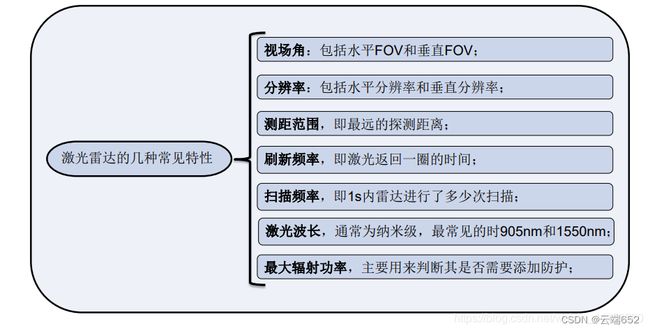
激光雷达有自己的优势
1)不受光线的干扰,激光雷达可以全天候进行运作,它只需要接收激光束的回波信号来获取目标信息,所以,如阴影,黑夜等对激光雷达的影响很小;
2)获取的信息量丰富,可以获取目标的三维信息,距离、角度、反射强度、速度等,生成目标多维度图像;
3)激光雷达波长短,可发射发散角非常小的激光束,其多路径效应小(不会形成定向发射,与微波或者毫米波产生多路径效应),可以探测低空或超低空目标,能有效解决近距离横向视觉盲区问题;
4)激光雷达的有效距离比摄像头远,在低速时,视觉采样点不足,拟合的车道线准确度较低,而激光有效的采样点较多,精准度远高于视觉系统;相比于毫米波雷达,激光雷达的工作频率高于毫米波数个量级,具有极高的距离分辨率、角分辨率和速度分辨率;
5)低速近距离状态下,对于未知物体或者有遮挡物体,激光雷达的目标检测能力要优于摄像头;
6)点云前处理算力较低,可以直接通过点云进行高密度绘制,输出通行空间,无需二次转化。
激光雷达在自动驾驶中的应用
1、感知
2、标定:一般标定方法首先采用最小张树方法和连接图算法实现数据间的邻接关系,再采用关键点、线、面匹配的方法,求解出传感器的姿态信息
3、里程计与定位:当使用当前帧与整个点云地图进行匹配时,就可以得到传感器在整个地图中的位姿,从而实现在地图中的定位
毫米波雷达
毫米波是一种波长介于 1-10mm 的电磁波,其波长短、频段宽,比较容易实现窄波束,具有分辨率高,不易受干扰等特点。毫米波雷达是采用毫米波对目标进行探测,获取目标的相对距离、相对速度、方位的高精度传感器。
工作原理
毫米波雷达的工作原理分为测距原理、测速原理及测角原理
测距:通过给目标连续发送电磁波,然后利用传感器接收从物体返回的电磁波,通过探测电磁波的飞行(往返)时间来获得目标物距离。
测速:根据多普勒效应,通过计算返回接收天线的雷达波的频率变化就可以得到目标相对于雷达的运动速度,简单来说就是相对速度正比于频率变化量。
测方位角:通过并列的接收天线收到同一目标反射的雷达波的相位差来计算得到目标的方位角。
在自动驾驶行业中的应用

77GHz毫米波:指频率在76-81GHz的车载雷达。
77GHz毫米波雷达有等效同性各向辐射功率(EIRP)的优势,可用于前端远程雷达,探测前车与本车的相对距离和相对速度,实现如自适应巡航控制等功能。
V2X
称为车用无线通信技术,本质是一种物联网技术,V代表车辆、X代表道路、人、车、设备等一切可连接设备
V2X:本质就是通过道路、行人、车辆间的协调实现整个道路运输的智能化。
V2X场景细分
V2V
V2V是最经典的场景,指的是道路上车辆之间的通信。典型的就是前方车辆并道,后方车辆避让。
V2I
V2I是指车载设备与路侧基础设施(如红绿灯、交通摄像头、路侧单元等)进行通信,路侧基础设施也可以获取附近区域车辆的信息并发布各种实时信息。V2I通信主要应用于实时信息服务、车辆监控管理、不停车收费等。
V2P
V2P是指弱势交通群体(包括行人、骑行者等)使用用户设备(如手机、笔记本电脑等)与车载设备进行通信。V2P通信主要应用于避免或减少交通事故、信息服务等。
V2N
V2N是指车载设备通过接入网/核心网与云平台连接,云平台与车辆之间进行数据交互,并对获取的数据进行存储和处理,提供车辆所需要的各类应用服务。V2N通信主要应用于车辆导航、车辆远程监控、紧急救援、信息娱乐服务等。
GNSS
无人车一般使用RTK(载波相位差分技术)定位、频率相对较低、10Hz左右。