图像质量评估指标:MSE,PSNR,SSIM
文章目录
- MSE与PSNR的计算方法
- MSE与PSNR的问题
- SSIM的理念与计算方法
-
- 理念
- 概念准备
- 公式理解
-
- 基本元素
- 三原则
- 亮度、对比度、结构的相似度指标设计
- 最终公式
- 程序计算方法
-
- 计算公式推导
- 程序
MSE与PSNR的计算方法
MSE: Mean Square Error,均方误差
PSNR: Peak Signal to Noise Ratio,峰值信噪比
假设现在有两个图像,名字分别是 X , Y X, Y X,Y,其中的元素分别记为 x i , y i x_i, y_i xi,yi,Array中包含的元素个数为N,那么MSE和PSNR的计算公式分别为:
MSE:
M S E = 1 N ∑ i N ( x i − y i ) 2 MSE = \frac {1}{N} \sum_{i}^{N}(x_i - y_i)^2 MSE=N1i∑N(xi−yi)2
这里虽然将 X , Y X, Y X,Y表达成一维的形式,但事实上其尺寸可任意。在进行图像质量评估时,MSE越小表明待评估的图像质量越好。
PSNR:
P N S R = 10 log 10 L 2 M S E PNSR = 10\log_{10}{\frac {L^2}{MSE}} PNSR=10log10MSEL2
可以看出,PSNR事实上只是将MSE换成了信号处理中常用的db(分贝)表达形式,所以PSNR与MSE没有什么本质上的不同,只是数字上看起来更加有区分度一些(从数学上讲这算不得什么根本性的东西,但从人的辨识度来讲,这个优势还是挺明显的)。由于PSNR公式将MSE放在了分母上,所以在进行图像质量评估时,PSNR数值越大表明待评估的图像质量越好,这一点与MSE相反。PSNR公式中的L是一个常数,它表示图像数据类型的最大动态范围。比如对于float型的图像数据,其取值范围是[0, 1],所以L=1。对于uint8类型的图像数据,其取值范围是[0, 255],所以L=255。一般情况下L就这两种情况,至于HDR(High Dynamic Range,宽动态范围)的图像,则根据图像的位深另算。
MSE与PSNR的问题
MSE与PSNR的问题是,在计算每个位置上的像素差异时,其结果仅与当前位置的两个像素值有关,与其它任何位置上的像素无关。这也就是说,这种计算差异的方式仅仅将图像看成了一个个孤立的像素点,而忽略了图像内容所包含的一些视觉特征,特别是图像的局部结构信息。而图像质量的好坏极大程度上是一个主观感受,其中结构信息对人主观感受的影响非常之大。
因此,采用这种方式计算出来的差异有时不能很好地反映图像质量。这就是SSIM(Structural Similarity,结构相似性)所希望要解决的问题。
SSIM的理念与计算方法
参考文献:Image Quality Assessment : From Error Visibility to Structural Similarity,Wang et. al., 2004
理念
SSIM是为了解决上述提到的MSE与PSNR的问题而提出的,所以SSIM在理念上,与后面二者最重要最根本的一个不同是,SSIM计算两张图像在每个位置上的差异时,不是在该位置上从两张图中各取一个像素,而是各取了一个区域的像素。个人认为这是大道,而具体的计算方法属于小道,不过也是设计精良的小道。
概念准备
在具体的计算方面,SSIM认为两个图像块之间的差异由以下几个部分组成:
- 亮度,对应于均值
- 对比度,对应于方差或标准差
- 结构,对应于余弦相似度
上述三组对应关系如何理解?下面我们做一个简单的解释。
图像的亮度是图像像素值大小的一种描述。对于单个像素值而言,像素值越大,就越接近白色,也就越亮,反之越暗;对于整个图像而言,所有像素的平均值越大,整张图像就越亮,反之越暗。
图像的对比度是图像像素值在整个动态范围内分布情况的一种描述。图像像素值在动态范围内分布地越宽广,对比度就越好;反之图像像素值分布地越紧凑,对比度就差。而这种分布范围的描述恰恰就对应于方差或标准差的概念。
图像的结构指的是像素间相对位置以及比例关系的描述,它与图像像素值的绝对大小反而没什么关系。比如考虑这样一个简单的图像,图像中只画了一个正方形,如果不考虑数值类型的截断问题的话,那么我们对这张图像乘以任意数值,得到结果仍然是一个结构一模一样的正方形。这正是余弦相似度所表达的概念,余弦相似度又称为余弦夹角,是对两个向量方向差异的一种度量,它不考虑向量的大小。图像结构就可以看作是图像在向量空间中的方向。
这三个维度的信息形成了一种互补的关系,在三者的共同约束下形成了对图像质量的描述。比如余弦相似度可以描述图像结构的差异程度,但是它却无法保证图像绝对数值的差异,比如向量(1, 2, 3),(2, 4, 6),(3, 6, 9)三者两两之间的余弦相似度均为1,但是它们的数值大小和方差却各不相同。反过来看,图像的均值和方差相同的情况下也无法保证图像的结构相同,因为即使我们将图像的像素位置完全打乱,其均值和方差也会保持完全不变,但是结构却发生了翻天覆地得变化。
公式理解
基本元素
假设一个图像块的像素数目为N,其中的元素记为 x i x_i xi(向量的维度不影响公式的理解,并且可以与原文保持一致)。那么图像块的均值、标准差(无偏)分别为:
均值:
μ x = 1 N ∑ i N x i (1) \mu_{x} = \frac{1}{N}\sum_{i}^{N}{x_i} \tag{1} μx=N1i∑Nxi(1)
标准差:
σ x = ( 1 N − 1 ∑ i N ( x i − μ x ) 2 ) 1 / 2 (2) \sigma_{x} = \bigg( \frac{1}{N-1}\sum_{i}^{N}(x_i-\mu_{x})^2 \bigg)^{1/2} \tag{2} σx=(N−11i∑N(xi−μx)2)1/2(2)
假设我们有另外一个图像块,像素数目也为N,其中的元素记为 y i y_i yi,那么两个图像块减去均值后的余弦相似度公式为:
s ( x , y ) = ∑ i N ( x i − μ x ) ( y i − μ y ) ( ∑ i N ( x i − μ x ) 2 ) 1 / 2 ( ∑ i N ( y i − μ y ) 2 ) 1 / 2 = 1 N − 1 ∑ i N ( x i − μ x ) ( y i − μ y ) ( 1 N − 1 ∑ i N ( x i − μ x ) 2 ) 1 / 2 ( 1 N − 1 ∑ i N ( y i − μ y ) 2 ) 1 / 2 = σ x y σ x σ y \begin{aligned} s(x,y) &= \frac {\sum_{i}^{N}(x_i-\mu_{x})(y_i-\mu_{y})} {\bigg(\sum_{i}^{N}(x_i-\mu_{x})^2 \bigg)^{1/2} \bigg(\sum_{i}^{N}(y_i-\mu_{y})^2 \bigg)^{1/2}} \\[8ex] &= \frac {\frac{1}{N-1} \sum_{i}^{N}(x_i-\mu_{x})(y_i-\mu_{y})} {\bigg(\frac{1}{N-1}\sum_{i}^{N}(x_i-\mu_{x})^2 \bigg)^{1/2} \bigg(\frac{1}{N-1}\sum_{i}^{N}(y_i-\mu_{y})^2 \bigg)^{1/2}} \\[8ex] &= \frac {\sigma_{xy}}{\sigma_{x} \sigma_{y}} \end{aligned} s(x,y)=(∑iN(xi−μx)2)1/2(∑iN(yi−μy)2)1/2∑iN(xi−μx)(yi−μy)=(N−11∑iN(xi−μx)2)1/2(N−11∑iN(yi−μy)2)1/2N−11∑iN(xi−μx)(yi−μy)=σxσyσxy
其中 σ x y \sigma_{xy} σxy表示协方差:
σ x y = 1 N − 1 ∑ i N ( x i − μ x ) ( y i − μ y ) (3) \sigma_{xy} = \frac{1}{N-1} \sum_{i}^{N}(x_i-\mu_{x})(y_i-\mu_{y}) \tag{3} σxy=N−11i∑N(xi−μx)(yi−μy)(3)
三原则
本文所讨论的图像质量评估均指有标签(Ground Truth)情况下的图像质量评估,此时待评估图像的质量使用它与标签的相似度进行衡量。
作者认为,相似度指标的设计均应满足以下三个原则:
- 对称性(Symmetry): S i m ( X , Y ) = S i m ( Y , X ) Sim(X,Y) = Sim(Y,X) Sim(X,Y)=Sim(Y,X)
- 存在边界(Boundedness): S i m ( X , Y ) ≤ 1 Sim(X,Y) \le 1 Sim(X,Y)≤1
- 最大值条件唯一(Unique maximum):当且仅当 X = Y X=Y X=Y时, S i m ( X , Y ) = 1 Sim(X,Y)=1 Sim(X,Y)=1成立 。 X = Y X=Y X=Y的离散形式是:对于所有的 i = 0 , 1 , 2 , . . . , N i=0, 1, 2, ..., N i=0,1,2,...,N,均有 x i = y i x_i = y_i xi=yi
以上三个条件很容易理解。
- 对称性不必讲了,很显然应该如此。
- 我们通常对
相似程度的衡量,最高就是100%,这也就是边界定为1的原因。 - 当相似度为100%时,应当,也只能是两张图完全一样的情况。
亮度、对比度、结构的相似度指标设计
在文章中,亮度和对比度的相似度指标设计使用了相同的原则,均使用了我们高中时期学的一个很简单的不等式关系:
a 2 + b 2 ≥ 2 a b a^2 + b^2 \ge 2ab a2+b2≥2ab
当且仅当 a = b a=b a=b时上式的等号关系成立。
将 a 2 + b 2 a^2 + b^2 a2+b2放到分母上,并将亮度(均值)和对比度(标准差)代入其中,即可得到亮度和对比度的相似度指标。
亮度的相似度:
l ( x , y ) = 2 μ x μ y μ x 2 + μ y 2 = s t a b i l i z a t i o n 2 μ x μ y + C 1 μ x 2 + μ y 2 + C 1 (4) l(x,y) = \frac {2\mu_x\mu_y}{\mu_x^2 + \mu_y^2} \xlongequal{stabilization} \frac {2\mu_x\mu_y + C_1}{\mu_x^2 + \mu_y^2 + C_1} \tag{4} l(x,y)=μx2+μy22μxμystabilizationμx2+μy2+C12μxμy+C1(4)
对比度的相似度:
c ( x , y ) = 2 σ x σ y σ x 2 + σ y 2 = s t a b i l i z a t i o n 2 σ x σ y + C 2 σ x 2 + σ y 2 + C 2 (5) c(x,y) = \frac {2\sigma_x\sigma_y}{\sigma_x^2 + \sigma_y^2} \xlongequal{stabilization} \frac {2\sigma_x\sigma_y + C_2}{\sigma_x^2 + \sigma_y^2 + C_2} \tag{5} c(x,y)=σx2+σy22σxσystabilizationσx2+σy2+C22σxσy+C2(5)
结构的相似度则直接借用了余弦相似度的概念,前面我们已经写过了,现在直接将其罗列如下:
s ( x , y ) = σ x y σ x σ y = s t a b i l i z a t i o n σ x y + C 3 σ x σ y + C 3 (6) s(x,y) = \frac {\sigma_{xy}}{\sigma_{x} \sigma_{y}} \xlongequal{stabilization} \frac {\sigma_{xy} + C_3}{\sigma_{x} \sigma_{y} + C_3} \tag{6} s(x,y)=σxσyσxystabilizationσxσy+C3σxy+C3(6)
上面的 C 1 , C 2 , C 3 C_1, C_2, C_3 C1,C2,C3是常数,用来使计算更加稳定,防止分母出现过小的情况。一般来说,这几个常数相比较 μ , σ \mu, \sigma μ,σ等变量应当是一个小值。
很容易知道,(4)(5)(6)三个公式均满足前面提到的三个原则。
最终公式
有了(4)(5)(6)三个公式后,作者将SSIM定义成了如下形式:
S S I M ( x , y ) = [ L ( x , y ) ] α [ c ( x , y ) ] β [ s ( x , y ) ] γ SSIM(x,y) = [L(x,y)]^\alpha [c(x,y)]^\beta [s(x,y)]^\gamma SSIM(x,y)=[L(x,y)]α[c(x,y)]β[s(x,y)]γ
α , β , γ \alpha, \beta, \gamma α,β,γ用于调节三部分的权重。在实际计算时, 通常取 α = β = γ = 1 \alpha = \beta = \gamma = 1 α=β=γ=1。再令 c 3 = C 2 / 2 c_3 = C_2 / 2 c3=C2/2,然后将(4)(5)(6)代入上式,(5)的分子和(6)的分母可以消去,于是可得:
S S I M ( x , y ) = ( 2 μ x μ y + C 1 ) ( 2 σ x y + C 2 ) ( μ x 2 + μ y 2 + C 1 ) ( σ x 2 + σ y 2 + C 2 ) (7) SSIM(x,y) =\frac {(2\mu_x\mu_y + C_1) (2\sigma_{xy} + C_2)}{(\mu_x^2 + \mu_y^2 + C_1) (\sigma_x^2 + \sigma_y^2 + C_2)} \tag{7} SSIM(x,y)=(μx2+μy2+C1)(σx2+σy2+C2)(2μxμy+C1)(2σxy+C2)(7)
其中
C 1 = ( K 1 L ) 2 (8) C_1 = (K_1L)^2 \tag{8} C1=(K1L)2(8)
C 2 = ( K 2 L ) 2 (9) C_2 = (K_2L)^2 \tag{9} C2=(K2L)2(9)
(7)就是最终用于计算SSIM的公式。
公式(8)(9)之所以这样写,是为了抵消掉图像数值类型的影响。根据文章,在实际计算时,取 K 1 = 0.01 , K 2 = 0.03 K_1=0.01, K_2=0.03 K1=0.01,K2=0.03。
特别注意:按照上述方法,我们计算得到了一个图像块的SSIM值,在实际计算时,一个图像块通常取成正方形,然后将该SSIM值赋给图像块的中心位置。然后滑动这个正方形块,可以得到其他所有位置的SSIM值,于是我们就得到了一个SSIM图。然而在实际中,我们对两张图像进行计算得到的通常是一个SSIM值,这个值在文章中称为mean SSIM(MSSIM),计算方法是对SSIM图取平均:
M S S I M ( X , Y ) = 1 M ∑ j M S S I M ( x j , y j ) (10) MSSIM(X,Y) = \frac{1}{M} \sum_{j}^{M} SSIM(x_j, y_j) \tag{10} MSSIM(X,Y)=M1j∑MSSIM(xj,yj)(10)
程序计算方法
计算公式推导
在真正写程序做计算时,为了让计算更加模块化,条理更清晰,部分公式的推导方式会跟原文不太一样,需要再推导一番。这里有一部分内容参考了skimage.metrics的计算方式。
方差公式:
v a r x = σ x 2 = 1 N − 1 ∑ i N ( x i − μ x ) 2 = 1 N − 1 ∑ i N ( x i 2 − 2 x i μ x + μ x 2 ) = 1 N − 1 ( ∑ i N x i 2 − 2 μ x ∑ i N x i + ∑ i N μ x 2 ) \begin{aligned} var_x = \sigma_x^2 &= \frac {1}{N-1} \sum_{i}^{N} (x_i - \mu_x)^2 \\[4ex] &= \frac {1}{N-1} \sum_{i}^{N} (x_i^2 - 2x_i\mu_x + \mu_x^2) \\[4ex] &= \frac {1}{N-1} (\sum_{i}^{N}x_i^2 - 2\mu_x \sum_{i}^{N} x_i + \sum_{i}^{N} \mu_x^2) \\[4ex] \end{aligned} varx=σx2=N−11i∑N(xi−μx)2=N−11i∑N(xi2−2xiμx+μx2)=N−11(i∑Nxi2−2μxi∑Nxi+i∑Nμx2)
根据公式(1)可知
∑ i N x i = N ⋅ μ x \sum_{i}^{N} x_i = N \cdot \mu_x i∑Nxi=N⋅μx
由于 μ x \mu_x μx是一个标量,所以
∑ i N μ x 2 = N ⋅ μ x 2 \sum_{i}^{N} \mu_x^2 = N \cdot \mu_x^2 i∑Nμx2=N⋅μx2
在此基础上继续上面的推导:
v a r x = 1 N − 1 ( ∑ i N x i 2 − 2 μ x ∑ i N x i + ∑ i N μ x 2 ) = 1 N − 1 ( ∑ i N x i 2 − 2 N ⋅ μ x 2 + N ⋅ μ x 2 ) = 1 N − 1 ( ∑ i N x i 2 − N ⋅ μ x 2 ) = N N − 1 ( 1 N ∑ i N x i 2 − μ x 2 ) = N N − 1 ( μ x 2 − μ x 2 ) (11) \begin{aligned} var_x &= \frac {1}{N-1} (\sum_{i}^{N}x_i^2 - 2\mu_x \sum_{i}^{N} x_i + \sum_{i}^{N} \mu_x^2) \\[4ex] &= \frac {1}{N-1} (\sum_{i}^{N}x_i^2 - 2N \cdot \mu_x^2 + N \cdot \mu_x^2) \\[4ex] &= \frac {1}{N-1} (\sum_{i}^{N}x_i^2 - N \cdot \mu_x^2) \\[4ex] &= \frac {N}{N-1} (\frac {1}{N} \sum_{i}^{N}x_i^2 - \mu_x^2) \\[4ex] &= \frac {N}{N-1} (\mu_{x^2} - \mu_x^2) \end{aligned} \tag{11} varx=N−11(i∑Nxi2−2μxi∑Nxi+i∑Nμx2)=N−11(i∑Nxi2−2N⋅μx2+N⋅μx2)=N−11(i∑Nxi2−N⋅μx2)=N−1N(N1i∑Nxi2−μx2)=N−1N(μx2−μx2)(11)
此时 μ \mu μ可以看做一个算子,它的功能是对其脚标变量求平均。
同理可以推导协方差公式,文章中用 σ x y \sigma_{xy} σxy表示:
σ x y = 1 N − 1 ∑ i N ( x i − μ x ) ( y i − μ y ) = 1 N − 1 ∑ i N ( x i y i − x i μ y − y i μ x + μ x μ y ) = 1 N − 1 ( ∑ i N x i y i − μ y ∑ i N x i − μ x ∑ i N y i + ∑ i N μ x μ y ) = 1 N − 1 ( ∑ i N x i y i − N ⋅ μ y μ x − N ⋅ μ x μ y + N ⋅ μ x μ y ) = 1 N − 1 ( ∑ i N x i y i − N ⋅ μ x μ y ) = N N − 1 ( μ x y − μ x μ y ) (12) \begin{aligned} \sigma_{xy} &= \frac {1}{N-1} \sum_{i}^{N} (x_i - \mu_x) (y_i - \mu_y) \\[4ex] &= \frac {1}{N-1} \sum_{i}^{N} (x_iy_i - x_i\mu_y - y_i\mu_x+ \mu_x \mu_y) \\[4ex] &= \frac {1}{N-1} (\sum_{i}^{N}x_iy_i - \mu_y\sum_{i}^{N}x_i - \mu_x\sum_{i}^{N}y_i+ \sum_{i}^{N}\mu_x \mu_y) \\[4ex] &= \frac {1}{N-1} (\sum_{i}^{N}x_iy_i - N \cdot \mu_y\mu_x - N \cdot \mu_x\mu_y+ N \cdot \mu_x \mu_y) \\[4ex] &= \frac {1}{N-1} (\sum_{i}^{N}x_iy_i - N \cdot \mu_x\mu_y) \\[4ex] &= \frac {N}{N-1} (\mu_{xy} - \mu_x\mu_y) \end{aligned} \tag{12} σxy=N−11i∑N(xi−μx)(yi−μy)=N−11i∑N(xiyi−xiμy−yiμx+μxμy)=N−11(i∑Nxiyi−μyi∑Nxi−μxi∑Nyi+i∑Nμxμy)=N−11(i∑Nxiyi−N⋅μyμx−N⋅μxμy+N⋅μxμy)=N−11(i∑Nxiyi−N⋅μxμy)=N−1N(μxy−μxμy)(12)
下面我们通过归一化,将公式中的L去掉。
如果记 x ˉ \bar x xˉ 是 x x x 归一化后的结果,那么有:
x = L ⋅ x ˉ x = L \cdot \bar x x=L⋅xˉ
进而有:
μ x = 1 N ∑ x i = 1 N ∑ x ˉ i ⋅ L = L ⋅ μ x ˉ \mu_x = \frac{1}{N} \sum x_i= \frac{1}{N} \sum \bar x_i \cdot L = L \cdot \mu_{\bar x} \\[6ex] μx=N1∑xi=N1∑xˉi⋅L=L⋅μxˉ
σ x = ( 1 N − 1 ∑ i N ( x i − μ x ) 2 ) 1 / 2 = ( 1 N − 1 ∑ i N ( L ⋅ x ˉ i − L ⋅ μ x ˉ ) 2 ) 1 / 2 = L ⋅ ( 1 N − 1 ∑ i N x ˉ i − μ x ˉ ) 2 ) 1 / 2 = L ⋅ σ x ˉ \begin{aligned} \sigma_x &= \bigg( \frac{1}{N-1}\sum_{i}^{N}(x_i-\mu_{x})^2 \bigg)^{1/2} \\[4ex] &= \bigg( \frac{1}{N-1}\sum_{i}^{N}(L \cdot \bar x_i - L \cdot \mu_{\bar x})^2 \bigg)^{1/2} \\[4ex] &= L \cdot \bigg( \frac{1}{N-1}\sum_{i}^{N} \bar x_i - \mu_{\bar x})^2 \bigg)^{1/2} \\[4ex] &= L \cdot \sigma_{\bar x} \\[6ex] \end{aligned} σx=(N−11i∑N(xi−μx)2)1/2=(N−11i∑N(L⋅xˉi−L⋅μxˉ)2)1/2=L⋅(N−11i∑Nxˉi−μxˉ)2)1/2=L⋅σxˉ
σ x y = 1 N − 1 ∑ i N ( x i − μ x ) ( y i − μ y ) = 1 N − 1 ∑ i N ( L ⋅ x ˉ i − L ⋅ μ x ˉ ) ( L ⋅ y ˉ i − L ⋅ μ y ˉ ) = L 2 ⋅ σ x ˉ y ˉ \begin{aligned} \sigma_{xy} &= \frac {1}{N-1} \sum_{i}^{N} (x_i - \mu_x) (y_i - \mu_y) \\[4ex] &= \frac {1}{N-1} \sum_{i}^{N} (L \cdot \bar x_i - L \cdot \mu_{\bar x}) (L \cdot \bar y_i - L \cdot \mu_{\bar y}) \\[4ex] &= L^2 \cdot \sigma_{\bar x \bar y} \end{aligned} \\[6ex] σxy=N−11i∑N(xi−μx)(yi−μy)=N−11i∑N(L⋅xˉi−L⋅μxˉ)(L⋅yˉi−L⋅μyˉ)=L2⋅σxˉyˉ
有了以上铺垫后,可以把SSIM公式改写为:
S S I M ( x , y ) = ( 2 μ x μ y + C 1 ) ( 2 σ x y + C 2 ) ( μ x 2 + μ y 2 + C 1 ) ( σ x 2 + σ y 2 + C 2 ) = ( 2 L 2 μ x ˉ μ y ˉ + K 1 2 L 2 ) ( 2 L 2 σ x ˉ y ˉ + K 2 2 L 2 ) ( L 2 μ x ˉ 2 + L 2 μ y ˉ 2 + K 1 2 L 2 ) ( L 2 σ x ˉ 2 + L 2 σ y ˉ 2 + K 2 2 L 2 ) = ( 2 μ x ˉ μ y ˉ + K 1 2 ) ( 2 σ x ˉ y ˉ + K 2 2 ) ( μ x ˉ 2 + μ y ˉ 2 + K 1 2 ) ( σ x ˉ 2 + σ y ˉ 2 + K 2 2 ) (13) \begin{aligned} SSIM(x,y) &= \frac {(2\mu_x\mu_y + C_1) (2\sigma_{xy} + C_2)}{(\mu_x^2 + \mu_y^2 + C_1) (\sigma_x^2 + \sigma_y^2 + C_2)} \\[4ex] &= \frac {(2L^2\mu_{\bar x}\mu_{\bar y} + K_1^2L^2) (2L^2\sigma_{\bar x \bar y} + K_2^2L^2)}{(L^2\mu_{\bar x}^2 + L^2\mu_{\bar y}^2 + K_1^2L^2) (L^2\sigma_{\bar x}^2 + L^2\sigma_{\bar y}^2 + K_2^2L^2)} \\[4ex] &= \frac {(2\mu_{\bar x}\mu_{\bar y} + K_1^2) (2\sigma_{\bar x \bar y} + K_2^2)}{(\mu_{\bar x}^2 + \mu_{\bar y}^2 + K_1^2) (\sigma_{\bar x}^2 +\sigma_{\bar y}^2 + K_2^2)} \end{aligned} \tag{13} SSIM(x,y)=(μx2+μy2+C1)(σx2+σy2+C2)(2μxμy+C1)(2σxy+C2)=(L2μxˉ2+L2μyˉ2+K12L2)(L2σxˉ2+L2σyˉ2+K22L2)(2L2μxˉμyˉ+K12L2)(2L2σxˉyˉ+K22L2)=(μxˉ2+μyˉ2+K12)(σxˉ2+σyˉ2+K22)(2μxˉμyˉ+K12)(2σxˉyˉ+K22)(13)
可以看出,只要一开始的时候用L把图像数据归一化一下,后面就可以再也不用L了。另外我们也知道,对于图像数据而言,如果不考虑uint8类型的截断误差,那么不同数据类型(float,uint8)只是相差一个因子而已,而这个因子在SSIM公式中可以消掉,所以数据类型不影响SSIM的计算结果。然而因为uint8有截断误差,所以如果图像原本是float,转成uint8后,SSIM的结果将有少许差异。
程序
下面的程序使用了两种方式计算MSE,PSNR,SSIM。一种是自己按照公式写代码,一种是直接调用了skimage的metrics模块,用于验证自己写的代码的正确性。
MSE和PSNR公式比较简单,没有那么多弯弯绕绕,所以两种方式计算出来的结果相同。
SSIM的结果就有差异了,差异来自两个原因。
- 虽然都使用卷积的方式对图像块求滑动平均,但是我对图像边界的处理时填0,而skimage.metrics对边界的处理是镜像填充,这个无所谓哪个更好,我只是觉得填0是更加通用一些的操作;
- skimage.metrics的卷积存在很严重的截断误差(可以单步追进去看看它调用的uniform_filter函数),导致的结果是,图像数据分别为float型和uint8型时,ssim的计算结果相差甚远,这显然不太合理。所以感觉要慎重使用skimage.metrics对SSIM的计算。
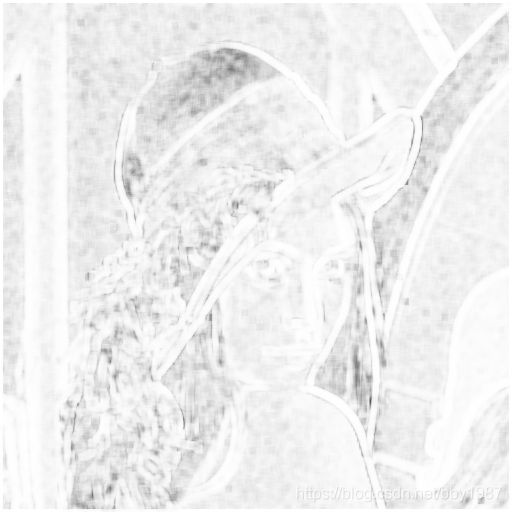
验证的例子是lena图像,一张是原图,一张是对图像先做两倍下采样,再做两倍上采样得到的结果,我们可以看看重采样会给图像带来多大的损失。
计算得到的mssim和ssim_map如下:
- 一个是转成灰度图计算的结果:mssim = 0.9356
- 一个是彩图计算的结果:mssim = 0.8965
图像中越亮的地方表明损失越小,越暗的地方表明损失越大。

# -*- coding: utf-8 -*-
import cv2
import numpy as np
from skimage import metrics
from scipy import signal
def compute_mse(X, Y):
"""
compute mean square error of two images
Parameters:
-----------
X, Y: numpy array
two images data
Returns:
--------
mse: float
mean square error
"""
X = np.float32(X)
Y = np.float32(Y)
mse = np.mean((X - Y) ** 2, dtype=np.float64)
return mse
def compute_psnr(X, Y, data_range):
"""
compute peak signal to noise ratio of two images
Parameters:
-----------
X, Y: numpy array
two images data
Returns:
--------
psnr: float
peak signal to noise ratio
"""
mse = compute_mse(X, Y)
psnr = 10 * np.log10((data_range ** 2) / mse)
return psnr
def compute_ssim(X, Y, win_size=7, data_range=None):
"""
compute structural similarity of two images
Parameters:
-----------
X, Y: numpy array
two images data
win_size: int
window size of image patch for computing ssim of one single position
data_range: int or float
maximum dynamic range of image data type
Returns:
--------
mssim: float
mean structural similarity
ssim_map: numpy array (float)
structural similarity map, same shape as input images
"""
assert X.shape == Y.shape, "X, Y must have same shape"
assert X.dtype == Y.dtype, "X, Y must have same dtype"
assert win_size <= np.min(X.shape[0:2]), \
"win_size should be <= shorter edge of image"
assert win_size % 2 == 1, "win_size must be odd"
if data_range is None:
if 'float' in str(X.dtype):
data_range = 1
elif 'uint8' in str(X.dtype):
data_range = 255
else:
raise ValueError(
'image dtype must be uint8 or float when data_range is None')
X = np.squeeze(X)
Y = np.squeeze(Y)
if X.ndim == 2:
mssim, ssim_map = _ssim_one_channel(X, Y, win_size, data_range)
elif X.ndim == 3:
ssim_map = np.zeros(X.shape)
for i in range(X.shape[2]):
_, ssim_map[:, :, i] = _ssim_one_channel(
X[:, :, i], Y[:, :, i], win_size, data_range)
mssim = np.mean(ssim_map)
else:
raise ValueError("image dimension must be 2 or 3")
return mssim, ssim_map
def _ssim_one_channel(X, Y, win_size, data_range):
"""
compute structural similarity of two single channel images
Parameters:
-----------
X, Y: numpy array
two images data
win_size: int
window size of image patch for computing ssim of one single position
data_range: int or float
maximum dynamic range of image data type
Returns:
--------
mssim: float
mean structural similarity
ssim_map: numpy array (float)
structural similarity map, same shape as input images
"""
X, Y = normalize(X, Y, data_range)
C1 = 0.01 ** 2
C2 = 0.03 ** 2
num = win_size ** 2
kernel = np.ones([win_size, win_size]) / num
mean_map_x = convolve2d(X, kernel)
mean_map_y = convolve2d(Y, kernel)
mean_map_xx = convolve2d(X * X, kernel)
mean_map_yy = convolve2d(Y * Y, kernel)
mean_map_xy = convolve2d(X * Y, kernel)
cov_norm = num / (num - 1)
var_x = cov_norm * (mean_map_xx - mean_map_x ** 2)
var_y = cov_norm * (mean_map_yy - mean_map_y ** 2)
covar_xy = cov_norm * (mean_map_xy - mean_map_x * mean_map_y)
A1 = 2 * mean_map_x * mean_map_y + C1
A2 = 2 * covar_xy + C2
B1 = mean_map_x ** 2 + mean_map_y ** 2 + C1
B2 = var_x + var_y + C2
ssim_map = (A1 * A2) / (B1 * B2)
mssim = np.mean(ssim_map)
return mssim, ssim_map
def normalize(X, Y, data_range):
"""
convert dtype of two images to float64, and then normalize them by
data_range
Paramters:
----------
X, Y: numpy array
two images data
data_range: int or float
maximum dynamic range of image data type
Returns:
--------
X, Y: numpy array
two images
"""
X = X.astype(np.float64) / data_range
Y = Y.astype(np.float64) / data_range
return X, Y
def convolve2d(image, kernel):
"""
convolve single channel image and kernel
Parameters:
-----------
image: numpy array
single channel image data
kernel: numpy array
kernel data
Returns:
--------
result: numpy array
image data, same shape as input image
"""
result = signal.convolve2d(image, kernel, mode='same', boundary='fill')
return result
def color_to_gray(image, normalization=False):
"""
convert color image to gray image
Parameters:
-----------
image: numpy array
color image data
normalization: bool
whether to do nomalization
Returns:
--------
image: numpy array
gray image data
"""
image = cv2.cvtColor(image, code=cv2.COLOR_BGR2GRAY)
if normalization and 'uint8' in str(image.dtype):
image = image.astype(np.float64) / 255
return image
def resample(image, factor, interpolation):
"""
down sample and then upsample image by factor using a certain interpolation
method
Parameters:
-----------
image: numpy array
image data
factor:
sampling factor
interpolation: enum
interpolation type
Returns:
--------
image_resample: numpy array
resampled image data
"""
height, width = image.shape[0:2]
downsample_size = (int(width / factor), int(height / factor))
image_resample = cv2.resize(image,
dsize=downsample_size,
interpolation=interpolation)
image_resample = cv2.resize(image_resample, dsize=(width, height),
interpolation=interpolation)
return image_resample
if __name__ == '__main__':
image_original = cv2.imread('lena512color.tiff')
image_resample = resample(image_original, 2, cv2.INTER_CUBIC)
# psnr
psnr = compute_psnr(image_original, image_resample, 255)
psnr_skimage = metrics.peak_signal_noise_ratio(image_original,
image_resample,
data_range=255)
print(psnr)
print(psnr_skimage)
# ssim
image_original = color_to_gray(image_original, normalization=False)
image_resample = color_to_gray(image_resample, normalization=False)
mssim, ssim_map = compute_ssim(image_original,
image_resample)
# set multichannel as False if using gray image, else True
mssim_skimage = metrics.structural_similarity(image_original,
image_resample,
multichannel=False)
print(mssim)
print(mssim_skimage)
cv2.imshow('original', image_original)
cv2.imshow('resample', image_resample)
cv2.imshow('ssim_map', ssim_map)
cv2.waitKey(0)
cv2.destroyAllWindows()