ORB-SLAM2代码详解08: 局部建图线程LocalMapping
pdf版本笔记的下载地址: ORB-SLAM2代码详解08_局部建图线程LocalMapping,排版更美观一点,这个网站的默认排版太丑了(访问密码:3834)
ORB-SLAM2代码详解08: 局部建图线程LocalMapping
- 各成员函数/变量
-
- 局部建图主函数: `Run()`
- 处理队列中第一个关键帧: `ProcessNewKeyFrame()`
- 剔除坏地图点: `MapPointCulling()`
- 创建新地图点: `CreateNewMapPoints()`
- 融合当前关键帧和其共视帧的地图点: `SearchInNeighbors()`
- 局部BA优化: `Optimizer::LocalBundleAdjustment()`
- 剔除冗余关键帧: `KeyFrameCulling()`
可以看看我录制的视频5小时让你假装大概看懂ORB-SLAM2源码
5小时让你假装大概看懂ORB-SLAM2源码
各成员函数/变量
| 成员函数/变量 | 访问控制 | 意义 |
|---|---|---|
std::list |
protected |
Tracking线程向LocalMapping线程插入关键帧的缓冲队列 |
void InsertKeyFrame(KeyFrame* pKF) |
public |
向缓冲队列mlNewKeyFrames内插入关键帧 |
bool CheckNewKeyFrames() |
protected |
查看缓冲队列mlNewKeyFrames内是否有待处理的新关键帧 |
int KeyframesInQueue() |
public |
查询缓冲队列mlNewKeyFrames内关键帧个数 |
bool mbAcceptKeyFrames |
protected |
LocalMapping线程是否愿意接收Tracking线程传来的新关键帧 |
bool AcceptKeyFrames() |
public |
mbAcceptKeyFrames的get方法 |
void SetAcceptKeyFrames(bool flag) |
public |
mbAcceptKeyFrames的set方法 |
Tracking线程创建的所有关键帧都被插入到LocalMapping线程的缓冲队列mlNewKeyFrames中.
成员函数mbAcceptKeyFrames表示当前LocalMapping线程是否愿意接收关键帧,这会被Tracking线程函数Tracking::NeedNewKeyFrame()用作是否生产关键帧的参考因素之一;但即使mbAcceptKeyFrames为false,在系统很需要关键帧的情况下Tracking线程函数Tracking::NeedNewKeyFrame()也会决定生成关键帧.
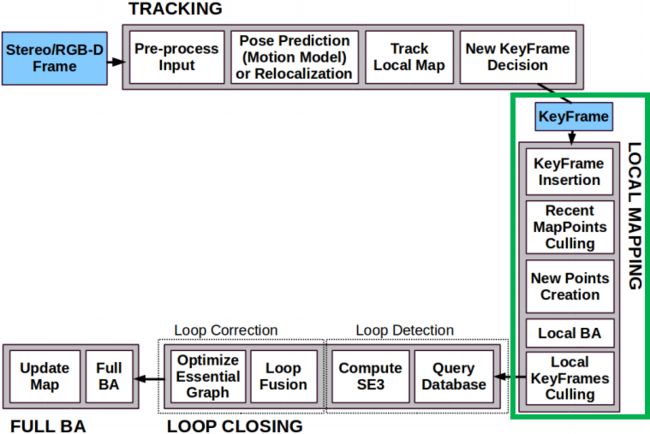
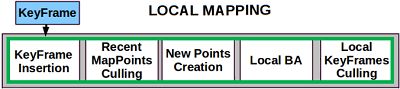
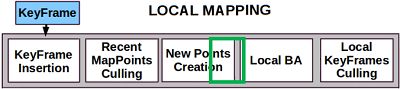
局部建图主函数: Run()
SetAcceptKeyFrames(false)
CheckNewKeyFrames
ProcessNewKeyFrame
MapPointCulling
CreateNewMapPoints
CheckNewKeyFrames
SearchInNeighbors
Optimizer::LocalBundleAdjustment
KeyFrameCulling
SetAcceptKeyFrames(true)
std::this_thread::sleep_for(std::chrono::milliseconds(3))
函数LocalMapping::Run()是LocalMapping线程的主函数,该函数内部是一个死循环,每3毫秒查询一次当前线程缓冲队列mlNewKeyFrames.若查询到了待处理的新关键帧,就进行查询
void LocalMapping::Run() {
while (1) {
SetAcceptKeyFrames(false); // 设置当前LocalMapping线程处于建图状态,不愿意接受Tracking线程传来的关键帧
// step1. 检查缓冲队列内的关键帧
if (CheckNewKeyFrames()) {
// step2. 处理缓冲队列中第一个关键帧
ProcessNewKeyFrame();
// step3. 剔除劣质地图点
MapPointCulling();
// step4. 创建新地图点
CreateNewMapPoints();
if (!CheckNewKeyFrames()) {
// step5. 将当前关键帧与其共视关键帧地图点融合
SearchInNeighbors();
// step6. 局部BA优化: 优化局部地图
mbAbortBA = false;
Optimizer::LocalBundleAdjustment(mpCurrentKeyFrame, &mbAbortBA, mpMap);
// step7. 剔除冗余关键帧
KeyFrameCulling();
}
// step8. 将当前关键帧加入闭环检测中
mpLoopCloser->InsertKeyFrame(mpCurrentKeyFrame);
}
SetAcceptKeyFrames(true); // 设置当前LocalMapping线程处于空闲状态,愿意接受Tracking线程传来的关键帧
// 线程暂停3毫秒再开启下一轮查询
std::this_thread::sleep_for(std::chrono::milliseconds(3));
}
}
处理队列中第一个关键帧: ProcessNewKeyFrame()
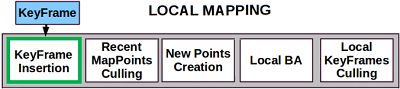

在第3步中处理当前关键点时比较有意思,通过判断该地图点是否观测到当前关键帧(pMP->IsInKeyFrame(mpCurrentKeyFrame))来判断该地图点是否是当前关键帧中新生成的.
-
若地图点是本关键帧跟踪过程中匹配得到的(
Tracking::TrackWithMotionModel()、Tracking::TrackReferenceKeyFrame()、Tracking::Relocalization()和Tracking::SearchLocalPoints()中调用了ORBmatcher::SearchByProjection()和ORBmatcher::SearchByBoW()方法),则是之前关键帧中创建的地图点,只需添加其对当前帧的观测即可. -
若地图点是本关键帧跟踪过程中新生成的(包括:1.单目或双目初始化
Tracking::MonocularInitialization()、Tracking::StereoInitialization();2.创建新关键帧Tracking::CreateNewKeyFrame()),则该地图点中有对当前关键帧的观测,是新生成的地图点,放入容器mlNewKeyFrames中供LocalMapping::MapPointCulling()函数筛选.
void LocalMapping::ProcessNewKeyFrame() {
// step1. 取出队列头的关键帧
{
unique_lock<mutex> lock(mMutexNewKFs);
mpCurrentKeyFrame = mlNewKeyFrames.front();
mlNewKeyFrames.pop_front();
}
// step2. 计算该关键帧的词向量
mpCurrentKeyFrame->ComputeBoW();
// step3. 根据地图点中是否观测到当前关键帧判断该地图是是否是新生成的
const vector<MapPoint *> vpMapPointMatches = mpCurrentKeyFrame->GetMapPointMatches();
for (size_t i = 0; i < vpMapPointMatches.size(); i++) {
MapPoint *pMP = vpMapPointMatches[i];
if (pMP && !pMP->isBad()) {
if (!pMP->IsInKeyFrame(mpCurrentKeyFrame)) {
// step3.1. 该地图点是跟踪本关键帧时匹配得到的,在地图点中加入对当前关键帧的观测
pMP->AddObservation(mpCurrentKeyFrame, i);
pMP->UpdateNormalAndDepth();
pMP->ComputeDistinctiveDescriptors();
} else // this can only happen for new stereo points inserted by the Tracking
{
// step3.2. 该地图点是跟踪本关键帧时新生成的,将其加入容器mlpRecentAddedMapPoints待筛选
mlpRecentAddedMapPoints.push_back(pMP);
}
}
}
// step4. 更新共视图关系
mpCurrentKeyFrame->UpdateConnections();
// step5. 将关键帧插入到地图中
mpMap->AddKeyFrame(mpCurrentKeyFrame);
}
剔除坏地图点: MapPointCulling()

冗余地图点的标准:满足以下其中之一就算是坏地图点
- 召回率 = 实 际 观 测 到 该 地 图 点 的 帧 数 m n F o u n d 理 论 上 应 当 观 测 到 该 地 图 点 的 帧 数 m n V i s i b l e < 0.25 =\frac{实际观测到该地图点的帧数mnFound}{理论上应当观测到该地图点的帧数mnVisible} < 0.25 =理论上应当观测到该地图点的帧数mnVisible实际观测到该地图点的帧数mnFound<0.25
- 在创建的3帧内观测数目少于2(双目为3)
若地图点经过了连续3个关键帧仍未被剔除,则被认为是好的地图点
void LocalMapping::MapPointCulling() {
list<MapPoint *>::iterator lit = mlpRecentAddedMapPoints.begin();
const unsigned long int nCurrentKFid = mpCurrentKeyFrame->mnId;
int nThObs;
if (mbMonocular)
nThObs = 2;
else
nThObs = 3;
const int cnThObs = nThObs;
while (lit != mlpRecentAddedMapPoints.end()) {
MapPoint *pMP = *lit;
if (pMP->isBad()) {
// 标准0: 地图点在其他地方被删除了
lit = mlpRecentAddedMapPoints.erase(lit);
} else if (pMP->GetFoundRatio() < 0.25f) {
// 标准1: 召回率<0.25
pMP->SetBadFlag();
lit = mlpRecentAddedMapPoints.erase(lit);
} else if (((int) nCurrentKFid - (int) pMP->mnFirstKFid) >= 2 && pMP->Observations() <= cnThObs) {
// 标准2: 从创建开始连续3个关键帧内观测数目少于cnThObs
pMP->SetBadFlag();
lit = mlpRecentAddedMapPoints.erase(lit);
} else if (((int) nCurrentKFid - (int) pMP->mnFirstKFid) >= 3)
// 通过了3个关键帧的考察,认为是好的地图点
lit = mlpRecentAddedMapPoints.erase(lit);
else
lit++;
}
}
MapPoint类中关于召回率的成员函数和变量如下:
| 成员函数/变量 | 访问控制 | 意义 | 初值 |
|---|---|---|---|
int mnFound |
protected |
实际观测到该地图点的帧数 | 1 |
int mnVisible |
protected |
理论上应当观测到该地图点的帧数 | 1 |
float GetFoundRatio() |
public |
召 回 率 = 实 际 观 测 到 该 地 图 点 的 帧 数 m n F o u n d 理 论 上 应 当 观 测 到 该 地 图 点 的 帧 数 m n V i s i b l e 召回率=\frac{实际观测到该地图点的帧数mnFound}{理论上应当观测到该地图点的帧数mnVisible} 召回率=理论上应当观测到该地图点的帧数mnVisible实际观测到该地图点的帧数mnFound | |
void IncreaseFound(int n=1) |
public |
mnFound加1 |
|
void IncreaseVisible(int n=1) |
public |
mnVisible加1 |
这两个成员变量主要用于Tracking线程.
-
在函数
Tracking::SearchLocalPoints()中,会对所有处于当前帧视锥内的地图点调用成员函数MapPoint::IncreaseVisible().(这些点未必真的被当前帧观测到了,只是地理位置上处于当前帧视锥范围内).void Tracking::SearchLocalPoints() { // 当前关键帧的地图点 for (MapPoint *pMP : mCurrentFrame.mvpMapPoints) { pMP->IncreaseVisible(); } } } // 局部关键帧中不属于当前帧,但在当前帧视锥范围内的地图点 for (MapPoint *pMP = *vit : mvpLocalMapPoints.begin()) { if (mCurrentFrame.isInFrustum(pMP, 0.5)) { pMP->IncreaseVisible(); } } // ... } -
在函数
Tracking::TrackLocalMap()中,会对所有当前帧观测到的地图点调用MaoPoint::IncreaseFound().bool Tracking::TrackLocalMap() { // ... for (int i = 0; i < mCurrentFrame.N; i++) { if (mCurrentFrame.mvpMapPoints[i]) { if (!mCurrentFrame.mvbOutlier[i]) { // 当前帧观测到的地图点 mCurrentFrame.mvpMapPoints[i]->IncreaseFound(); // ... } } } // ... }
创建新地图点: CreateNewMapPoints()
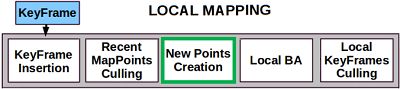
将当前关键帧分别与共视程度最高的前10(单目相机取20)个共视关键帧两两进行特征匹配,生成地图点.
对于双目相机的匹配特征点对,可以根据某帧特征点深度恢复地图点,也可以根据两帧间对极几何三角化地图点,这里取视差角最大的方式来生成地图点.

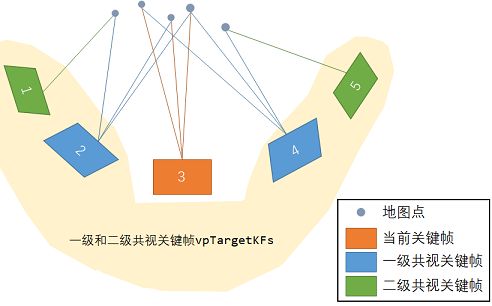
融合当前关键帧和其共视帧的地图点: SearchInNeighbors()
本函数将当前关键帧与其一级和二级共视关键帧做地图点融合,分两步:
- 正向融合: 将当前关键帧的地图点融合到各共视关键帧中.
- 反向融合: 将各共视关键帧的地图点融合到当前关键帧中.
void LocalMapping::SearchInNeighbors() {
// step1. 取当前关键帧的一级共视关键帧
const vector<KeyFrame *> vpNeighKFs = mpCurrentKeyFrame->GetBestCovisibilityKeyFrames(10);
// step2. 遍历一级关键帧,寻找二级关键帧
vector<KeyFrame *> vpTargetKFs;
for (KeyFrame *pKFi : vpNeighKFs) {
if (pKFi->isBad() || pKFi->mnFuseTargetForKF == mpCurrentKeyFrame->mnId)
continue;
vpTargetKFs.push_back(pKFi);
pKFi->mnFuseTargetForKF = mpCurrentKeyFrame->mnId;
const vector<KeyFrame *> vpSecondNeighKFs = pKFi->GetBestCovisibilityKeyFrames(5);
for (KeyFrame *pKFi2 : vpSecondNeighKFs) {
if (pKFi2->isBad() || pKFi2->mnFuseTargetForKF == mpCurrentKeyFrame->mnId || pKFi2->mnId == mpCurrentKeyFrame->mnId)
continue;
vpTargetKFs.push_back(pKFi2);
}
}
// step3. 正向融合: 将当前帧的地图点融合到各共视关键帧中
vector<MapPoint *> vpMapPointMatches = mpCurrentKeyFrame->GetMapPointMatches();
ORBmatcher matcher;
for (KeyFrame *pKFi : vpTargetKFs) {
matcher.Fuse(pKFi, vpMapPointMatches);
}
// step4. 反向融合: 将各共视关键帧的地图点融合到当前关键帧中
// step4.1. 取出各共视关键帧的地图点存入vpFuseCandidates
vector<MapPoint *> vpFuseCandidates;
for (KeyFrame *pKFi : vpTargetKFs) {
vector<MapPoint *> vpMapPointsKFi = pKFi->GetMapPointMatches();
for (MapPoint *pMP : vpMapPointsKFi.begin()) {
if (!pMP || pMP->isBad() || pMP->mnFuseCandidateForKF == mpCurrentKeyFrame->mnId)
continue;
pMP->mnFuseCandidateForKF = mpCurrentKeyFrame->mnId;
vpFuseCandidates.push_back(pMP);
}
}
// step 4.2. 进行反向融合
matcher.Fuse(mpCurrentKeyFrame, vpFuseCandidates);
// step5. 更新当前关键帧的地图点信息
vpMapPointMatches = mpCurrentKeyFrame->GetMapPointMatches();
for (MapPoint *pMP : vpMapPointMatches) {
if (pMP and !pMP->isBad()) {
pMP->ComputeDistinctiveDescriptors();
pMP->UpdateNormalAndDepth();
}
}
// step6. 更新共视图
mpCurrentKeyFrame->UpdateConnections();
}
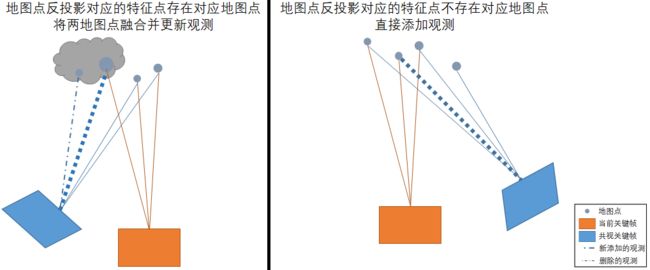
ORBmatcher::Fuse()将地图点与帧中图像的特征点匹配,实现地图点融合.
在将地图点反投影到帧中的过程中,存在以下两种情况:
- 若地图点反投影对应位置上不存在地图点,则直接添加观测.
- 若地图点反投影位置上存在对应地图点,则将两个地图点合并到其中观测较多的那个.
int ORBmatcher::Fuse(KeyFrame *pKF, const vector<MapPoint *> &vpMapPoints, const float th) {
// 遍历所有的待投影地图点
for(MapPoint* pMP : vpMapPoints) {
// step1. 将地图点反投影到相机成像平面上
const float invz = 1/p3Dc.at<float>(2);
const float x = p3Dc.at<float>(0)*invz;
const float y = p3Dc.at<float>(1)*invz;
const float u = fx*x+cx;
const float v = fy*y+cy;
const float ur = u-bf*invz;
const float maxDistance = pMP->GetMaxDistanceInvariance();
const float minDistance = pMP->GetMinDistanceInvariance();
cv::Mat PO = p3Dw-Ow;
const float dist3D = cv::norm(PO);
// step2. 地图点观测距离
if(dist3D<minDistance || dist3D>maxDistance )
continue;
// step3. 地图点的观测距离和观测方向不能太离谱
if (dist3D < minDistance || dist3D > maxDistance)
continue;
cv::Mat Pn = pMP->GetNormal();
if (PO.dot(Pn) < 0.5 * dist3D)
continue;
// step4. 在投影位置寻找图像特征点
int nPredictedLevel = pMP->PredictScale(dist3D, pKF);
const float radius = th * pKF->mvScaleFactors[nPredictedLevel];
const vector<size_t> vIndices = pKF->GetFeaturesInArea(u, v, radius);
const cv::Mat dMP = pMP->GetDescriptor();
int bestDist = 256;
int bestIdx = -1;
for (size_t idx : vIndices) {
const size_t idx = *vit;
const cv::KeyPoint &kp = pKF->mvKeysUn[idx];
const int &kpLevel = kp.octave;
// step4.1. 金字塔层级要接近
if (kpLevel < nPredictedLevel - 1 || kpLevel > nPredictedLevel)
continue;
// step4.2. 使用卡方检验检查重投影误差,单目和双目的自由度不同
if (pKF->mvuRight[idx] >= 0) {
const float ex = u - kp.pt.x;
const float ey = v - kp.pt.y;
const float er = ur - pKF->mvuRight[idx];
const float e2 = ex * ex + ey * ey + er * er;
if (e2 * pKF->mvInvLevelSigma2[kpLevel] > 7.8)
continue;
} else {
const float ex = u - kp.pt.x;
const float ey = v - kp.pt.y;
const float e2 = ex * ex + ey * ey;
if (e2 * pKF->mvInvLevelSigma2[kpLevel] > 5.99)
continue;
}
// step4.3. 检验描述子距离
const cv::Mat &dKF = pKF->mDescriptors.row(idx);
const int dist = DescriptorDistance(dMP, dKF);
if (dist < bestDist) {
bestDist = dist;
bestIdx = idx;
}
}
// step5. 与最近特征点的描述子距离足够小,就进行地图点融合
if (bestDist <= TH_LOW) {
MapPoint *pMPinKF = pKF->GetMapPoint(bestIdx);
if (pMPinKF) {
// step5.1. 地图点反投影位置上存在对应地图点,则将两个地图点合并到其中观测较多的那个则直接添加观测
if (!pMPinKF->isBad()) {
if (pMPinKF->Observations() > pMP->Observations())
pMP->Replace(pMPinKF);
else
pMPinKF->Replace(pMP);
}
} else {
// step5.2. 地图点反投影对应位置上不存在地图点,
pMP->AddObservation(pKF, bestIdx);
pKF->AddMapPoint(pMP, bestIdx);
}
nFused++;
}
}
return nFused;
}
局部BA优化: Optimizer::LocalBundleAdjustment()

局部BA优化当前帧的局部地图.
-
当前关键帧的一级共视关键帧位姿会被优化;二极共视关键帧会加入优化图,但其位姿不会被优化.
-
所有局部地图点位姿都会被优化.
Tracking线程中定义了局部地图成员变量mvpLocalKeyFrames和mvpLocalMapPoints,但是这些变量并没有被LocalMapping线程管理,因此在函数Optimizer::LocalBundleAdjustment()中还要重新构造局部地图变量,这种设计有些多此一举了.
剔除冗余关键帧: KeyFrameCulling()
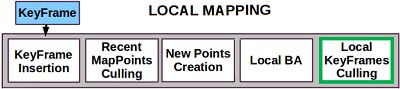
冗余关键帧标准: 90%以上的地图点能被超过3个其他关键帧观测到.
void LocalMapping::KeyFrameCulling() {
// step1. 遍历当前关键帧的所有共视关键帧
vector<KeyFrame *> vpLocalKeyFrames = mpCurrentKeyFrame->GetVectorCovisibleKeyFrames();
for (KeyFrame *pKF : vpLocalKeyFrames) {
// step2. 遍历所有局部地图点
const vector<MapPoint *> vpMapPoints = pKF->GetMapPointMatches();
int nRedundantObservations = 0;
int nMPs = 0;
for (MapPoint *pMP : vpMapPoints) {
if (pMP && !pMP->isBad()) {
if (!mbMonocular) {
// 双目相机只能看到不超过相机基线35倍的地图点
if (pKF->mvDepth[i] > pKF->mThDepth || pKF->mvDepth[i] < 0)
continue;
}
nMPs++;
int nObs = 0;
for (KeyFrame *pKFi : pMP->GetObservations()) {
= mit->first;
if (pKFi->mvKeysUn[mit->second].octave <= pKF->mvKeysUn[i].octave + 1) {
nObs++;
if (nObs >= 3)
break;
}
}
if (nObs >= 3) {
nRedundantObservations++;
}
}
}
}
// step3. 若关键帧超过90%的地图点能被超过3个其它关键帧观测到,则视为冗余关键帧
if (nRedundantObservations > 0.9 * nMPs)
pKF->SetBadFlag();
}
pdf版本笔记的下载地址: ORB-SLAM2代码详解08_局部建图线程LocalMapping,排版更美观一点,这个网站的默认排版太丑了(访问密码:3834)
ProcessNewKeyFrame()
mlNewKeyFrames头部第一个关键帧
则将其存入容器
mlpRecentAddedMapPoints中
则在地图点中接入对当前关键帧的观测
1. 单目与地图点平均深度比较
2. 双目/RBGD与相机基线比较
1.相机1双目视差角
cosParallaxStereo1
2.相机2双目视差角
cosParallaxStereo2
3.相机1与相机2间对极视差角
cosParallaxRays
参考
Initializer::Triangulate