ROS Tutorials 1.5-1.7
ROS Tutorials
理解 ROS Nodes
Nodes
A node really isn't much more than an executable file within a ROS package. ROS nodes use a ROS client library to communicate with other nodes. Nodes can publish or subscribe to a Topic. Nodes can also provide or use a Service.
Client Libraries
ROS client libraries allow nodes written in different programming languages to communicate:
- rospy = python client library
- roscpp = c++ client library
roscore
roscore is the first thing you should run when using ROS.
$ roscore
If roscore does not initialize and sends a message about lack of permissions, probably the ~/.ros folder is owned by root, change recursively the ownership of that folder with:
$ sudo chown -R ~/.ros rosnode
rosnode displays information about the ROS nodes that are currently running. The rosnode list command lists these active nodes:
$ rosnode list
/rosout
$ rosnode info /rosout
------------------------------------------------------------------------
Node [/rosout]
Publications:
* /rosout_agg [rosgraph_msgs/Log]
Subscriptions:
* /rosout [unknown type]
Services:
* /rosout/get_loggers
* /rosout/set_logger_level
contacting node http://machine_name:54614/ ...
Pid: 5092rosrun
rosrun allows you to use the package name to directly run a node within a package (without having to know the package path).
$ rosrun [package_name] [node_name]
$ rosrun turtlesim turtlesim_node
use a Remapping Argument to change the node's name:
$ rosrun turtlesim turtlesim_node __name:=my_turtle
cleaning the rosnode list with:
$ rosnode cleanup
Let's use another rosnode command, ping, to test that it's up:
$ rosnode ping my_turtle
rosnode: node is [/my_turtle]
pinging /my_turtle with a timeout of 3.0s
xmlrpc reply from http://aqy:42235/ time=1.152992ms
xmlrpc reply from http://aqy:42235/ time=1.120090ms
xmlrpc reply from http://aqy:42235/ time=1.700878ms
xmlrpc reply from http://aqy:42235/ time=1.127958ms理解 ROS Topics
$ rosrun turtlesim turtle_teleop_key
[ INFO] 1254264546.878445000: Started node [/teleop_turtle], pid [5528], bound on [aqy], xmlrpc port [43918], tcpros port [55936], logging to [~/ros/ros/log/teleop_turtle_5528.log], using [real] time
Reading from keyboard
---------------------------
Use arrow keys to move the turtle.
Now you can use the arrow keys of the keyboard to drive the turtle around.
ROS Topics
The turtlesim_node and the turtle_teleop_key node are communicating with each other over a ROS Topic. turtle_teleop_key is publishing the key strokes on a topic, while turtlesim subscribes to the same topic to receive the key strokes. Let's use rqt_graph which shows the nodes and topics currently running.
$ rosrun rqt_graph rqt_graph
The rostopic tool allows you to get information about ROS topics.
$ rostopic -h
rostopic bw display bandwidth used by topic
rostopic echo print messages to screen
rostopic hz display publishing rate of topic
rostopic list print information about active topics
rostopic pub publish data to topic
rostopic type print topic typerostopic list returns a list of all topics currently subscribed to and published.
$ rostopic list -h
Usage: rostopic list [/topic]
Options:
-h, --help show this help message and exit
-b BAGFILE, --bag=BAGFILE
list topics in .bag file
-v, --verbose list full details about each topic
-p list only publishers
-s list only subscribers
$ rostopic list -v
Published topics:
* /turtle1/color_sensor [turtlesim/Color] 1 publisher
* /turtle1/cmd_vel [geometry_msgs/Twist] 1 publisher
* /rosout [rosgraph_msgs/Log] 2 publishers
* /rosout_agg [rosgraph_msgs/Log] 1 publisher
* /turtle1/pose [turtlesim/Pose] 1 publisher
Subscribed topics:
* /turtle1/cmd_vel [geometry_msgs/Twist] 1 subscriber
* /rosout [rosgraph_msgs/Log] 1 subscriberROS Messages
Communication on topics happens by sending ROS messages between nodes. For the publisher (turtle_teleop_key) and subscriber (turtlesim_node) to communicate, the publisher and subscriber must send and receive the same type of message. This means that a topic type is defined by the message type published on it. The type of the message sent on a topic can be determined using rostopic type.
rostopic type [topic]
$ rostopic type /turtle1/cmd_vel
geometry_msgs/Twist
$ rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 zrostopic continued
rostopic pub publishes data on to a topic currently advertised.
rostopic pub [topic] [msg_type] [args]
$ rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
You may have noticed that the turtle has stopped moving; this is because the turtle requires a steady stream of commands at 1 Hz to keep moving. We can publish a steady stream of commands using rostopic pub -r command:
$ rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
rostopic hz reports the rate at which data is published.
rostopic hz [topic]
$ rostopic hz /turtle1/pose
subscribed to [/turtle1/pose]
average rate: 59.354
min: 0.005s max: 0.027s std dev: 0.00284s window: 58
average rate: 59.459
min: 0.005s max: 0.027s std dev: 0.00271s window: 118
average rate: 59.539
min: 0.004s max: 0.030s std dev: 0.00339s window: 177
average rate: 59.492
min: 0.004s max: 0.030s std dev: 0.00380s window: 237
average rate: 59.463
min: 0.004s max: 0.030s std dev: 0.00380s window: 290Using rqt_plot
rqt_plot displays a scrolling time plot of the data published on topics. Here we'll use rqt_plot to plot the data being published on the /turtle1/pose topic. First, start rqt_plot by typing
$ rosrun rqt_plot rqt_plot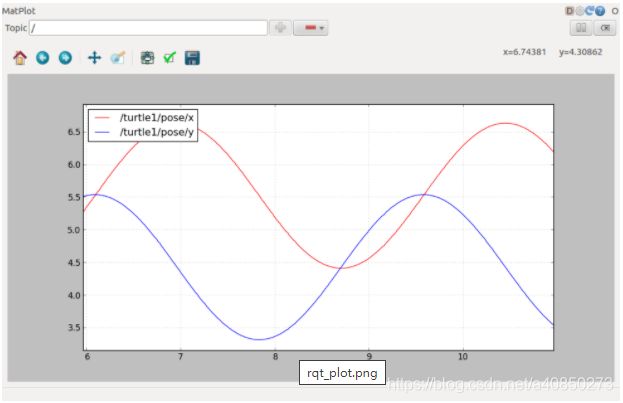
理解 ROS Services and Parameters
ROS Services
Services are another way that nodes can communicate with each other. Services allow nodes to send a request and receive a response.
rosservice can easily attach to ROS's client/service framework with services. rosservice has many commands that can be used on services, as shown below:
rosservice list print information about active services
rosservice call call the service with the provided args
rosservice type print service type
rosservice find find services by service type
rosservice uri print service ROSRPC uri$ rosservice list
/clear
/kill
/reset
/rosout/get_loggers
/rosout/set_logger_level
/spawn
/teleop_turtle/get_loggers
/teleop_turtle/set_logger_level
/turtle1/set_pen
/turtle1/teleport_absolute
/turtle1/teleport_relative
/turtlesim/get_loggers
/turtlesim/set_logger_levelrosservice type [service]
$ rosservice type /clear
std_srvs/EmptyThis service is empty, this means when the service call is made it takes no arguments (i.e. it sends no data when making a request and receives no data when receiving a response).
rosservice call [service] [args]
$ rosservice call /clear
This does what we expect, it clears the background of the turtlesim_node.
Let's look at the case where the service has arguments by looking at the information for the service spawn:
$ rosservice type /spawn | rossrv show
float32 x
float32 y
float32 theta
string name
---
string nameThis service lets us spawn a new turtle at a given location and orientation. The name field is optional, so let's not give our new turtle a name and let turtlesim create one for us.
$ rosservice call /spawn 2 2 0.2 ""
name: turtle2
Using rosparam
rosparam allows you to store and manipulate data on the ROS Parameter Server. The Parameter Server can store integers, floats, boolean, dictionaries, and lists. rosparam uses the YAML markup language for syntax. In simple cases, YAML looks very natural: 1 is an integer, 1.0 is a float, one is a string, true is a boolean, [1, 2, 3] is a list of integers, and {a: b, c: d} is a dictionary. rosparam has many commands that can be used on parameters, as shown below:
rosparam set set parameter
rosparam get get parameter
rosparam load load parameters from file
rosparam dump dump parameters to file
rosparam delete delete parameter
rosparam list list parameter names