深度 | 一文搞懂相机标定
相机标定,是图像测量和机器视觉应用时,绕不过去的关键步骤。通过标定,可以获得相机成像几何模型的参数,也就是三维空间中点与二维图像中点的对应关系。本文通过拆解相机成像的原理、过程及相机畸变,探讨相机标定的重要性,并介绍分析了几种常见的相机标定方法。
01 相机成像的原理
相机成像,实际上是一个光学成像过程。
我们将相机的镜头看作一个凸透镜,光线通过透镜在感光元件(CCD/CMOS)上成像,感光元件将光电信号转换为数字信号,再经数字信息处理(DSP)成数字图像,存储到存储介质当中。
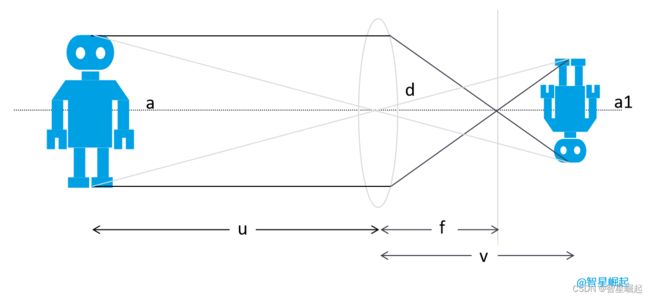 透镜成像原理,凸透镜的中心为光心,光线平行于主光轴(虚线)穿过透镜时,会汇聚到焦点,然后折射成像。其中,机器人a为实物,u为物距;机器人a1为成像,v为相距;f为焦距,表示焦点到光心的距离。
透镜成像原理,凸透镜的中心为光心,光线平行于主光轴(虚线)穿过透镜时,会汇聚到焦点,然后折射成像。其中,机器人a为实物,u为物距;机器人a1为成像,v为相距;f为焦距,表示焦点到光心的距离。
当相机感光元件位于凸透镜焦点附近,焦距与光心到感光元件距离无限接近时,即![]() ,相机成像模型就成了我们熟悉的「小孔成像」。
,相机成像模型就成了我们熟悉的「小孔成像」。
 小孔成像模型
小孔成像模型
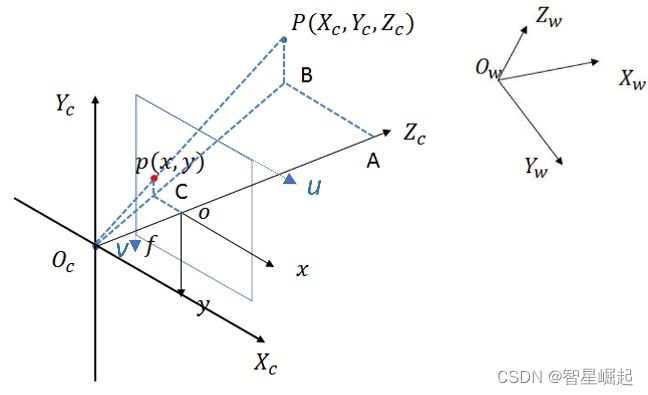
在相机成像过程中,一共涉及4个坐标系:
-
世界坐标系:由用户定义的三维世界坐标系,描述物体和相机在真实世界中的位置,原点可以任意选择。
-
相机坐标系:以相机的光心为坐标原点,x轴和y轴平行于图像坐标系的x轴和y轴,z轴为相机的光轴。
-
图像坐标系:与成像平面重合,以成像平面的中心(光轴与成像平面的交点)为坐标原点,x 轴和 y轴分别平行于成像平面的两条边。
-
像素坐标系:与成像平面重合,以成像平面的左上角顶点为原点,x 轴和 y 轴分别平行于图像坐标系的x轴和y轴。
举个例子,世界坐标系下的点 ![]() ,在相机坐标系中的坐标为
,在相机坐标系中的坐标为![]() ,投影到图像坐标系后坐标为
,投影到图像坐标系后坐标为![]() ,对应在像素坐标系中的坐标为
,对应在像素坐标系中的坐标为![]() 。
。
为了便于计算,我们将成像平面和物体放到了同一侧:
 相机成像模型
相机成像模型
02 用数学语言拆解相机成像
相机成像过程可以理解为坐标系间的三次变换。在理想情况下(不考虑畸变),变换过程如图:
 相机成像过程
相机成像过程
首先,世界坐标系→相机坐标系
世界坐标系到相机坐标系的转换属于刚体变换,通过旋转和平移即可获得,其中旋转矩阵为  ,平移矩阵为
,平移矩阵为  。
。
![\left[\begin{array}{c} x_c \\ y_c \\ z_c \\ 1 \end{array}\right]=\left[\begin{array}{ll} R & T \\ 0 & 1 \end{array}\right]\left[\begin{array}{c} x_w \\ y_w \\ z_w \\ 1 \end{array}\right]](http://img.e-com-net.com/image/info8/766965ca7d9f49fca0cbd9c6ba2bdd58.gif)
然后,相机坐标系→图像坐标系
从相机坐标系到图像坐标系满足透视投影关系:
最后,图像坐标系→像素坐标系
像素坐标系的单位为pixel,其中 ![]() 为成像平面中心点在像素坐标系下的坐标,
为成像平面中心点在像素坐标系下的坐标, 和
和 ![]() 分别表示在像素坐标系下,
分别表示在像素坐标系下,  轴和
轴和  轴方向每个像素的物理尺寸。
轴方向每个像素的物理尺寸。
综合公式,我们就可以直接得到,从世界坐标系到像素坐标系的转换关系式:
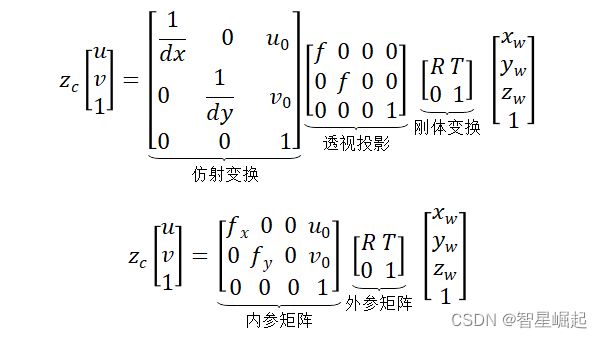
其中, ![]() 。
。
内参矩阵取决于相机内部参数,外参矩阵取决于相机坐标系和世界坐标系的位置。而相机标定,就可以帮我们求解出内参矩阵和外参矩阵。

03 相机畸变又该如何矫正
大家有没有觉得,平时用手机拍出来的照片,靠边的人通常会「脸变形」?
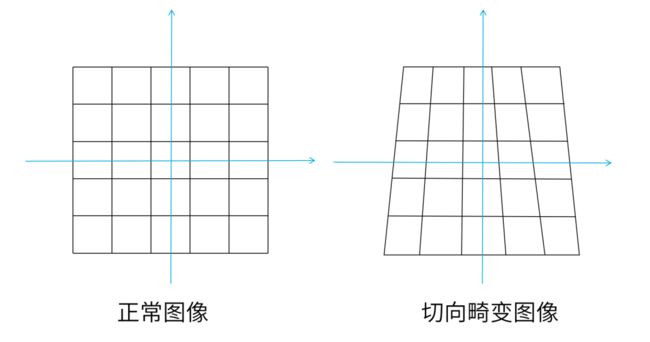
这其实是因为相机畸变。真实的镜头在成像时,会有畸变存在。由透镜形状引起的畸变是径向畸变,而由透镜安装与成像平面不平行引起的畸变是切向畸变。
径向畸变主要分为桶形畸变和枕型畸变。

在小孔成像模型中,一条直线投影到像素平面还是一条直线。但实际上,相机的透镜往往使真实环境中的一条直线在图片中变成了曲线,并且越靠近图像边缘越明显。由于透镜往往是中心对称的,不规则畸变也通常径向对称。
另外,如果是在相机组装过程中,透镜和感光元件CCD/CMOS的安装位置存在误差,导致透镜和成像平面没有严格平行,就会引起切向畸变。
这时,我们把一个矩形投影到成像平面,很可能就变成了一个梯形。
不过这些都问题不大,有相应的公式来进行矫正。对于径向畸变,可以用泰勒级数展开式,其中  为畸变后的实际坐标,
为畸变后的实际坐标,![]() 为矫正后坐标,
为矫正后坐标, 为该点距成像中心的距离:
为该点距成像中心的距离:
![]()
![]()
对于切向畸变,也有矫正公式:
![]()
![]()
总的来说,相机畸变由 ![]() 5个参数描述,而这些参数都可以使用相机标定来求解。质量较好的相机,切向畸变小到可忽略,径向畸变系数
5个参数描述,而这些参数都可以使用相机标定来求解。质量较好的相机,切向畸变小到可忽略,径向畸变系数  也可忽略,只计算
也可忽略,只计算 ![]() 两个参数就可以了。
两个参数就可以了。

04 常用的相机标定方法
一般来说,相机标定方法有传统相机标定法、主动视觉相机标定方法、相机自标定法以及零失真相机标定法这4种。
-
传统相机标定法
需要使用尺寸已知的标定物,通过建立标定物上坐标已知的点与其图像点之间的对应,利用一定的算法获得相机模型的内外参数。
可使用于任意相机模型,精度高,但标定时始终需要标定物,必须采用两幅或两幅以上的图像,且标定物的制作精度会影响标定结果。常见的有Tsai两步法、张氏标定法等。
-
主动视觉相机标定方法
基于主动视觉的相机标定法,是指已知相机的某些运动信息对相机进行标定。通过控制相机做某些特定运动并拍摄多组图像,依据图像信息和已知位移变化来求解相机内外参数。
这种方法不需要标定物,算法简单、鲁棒性高,缺点是成本高、设备昂贵。

-
相机自标定法
自标定算法主要利用相机运动的约束,灵活性强,可对相机进行在线定标。
但它是基于绝对二次曲线或曲面的方法,算法鲁棒性差,由于相机的运动约束条件太强,在实际生活中并不实用。常见的有分层逐步标定、基于Kruppa方程等。
-
零失真相机标定法
是以LCD显示屏为参考基准,以相移光栅为媒介,建立LCD像素与相机传感器像素之间的映射关系,确定每个相机像素点在LCD上的视点位置。
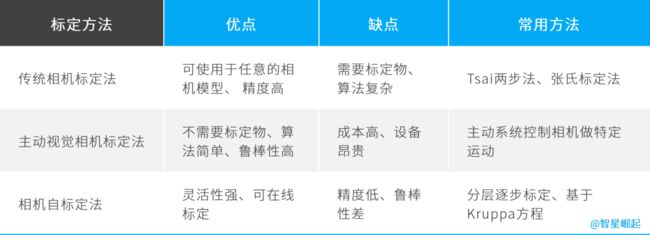 几种常见相机标定方法对比
几种常见相机标定方法对比
这4种标定方法各有优劣,可以根据自己的情况来选用。其中最常用的就是的张正友标定法(张氏标定法),操作简单、精度较高,可以满足大部分场合。
张正友标定法,是利用棋盘格标定板进行标定,将世界坐标系固定在棋盘格上。棋盘格上的每个格子大小都是已知的,即棋盘格每一个角点在世界坐标系下的坐标都可以计算得到。
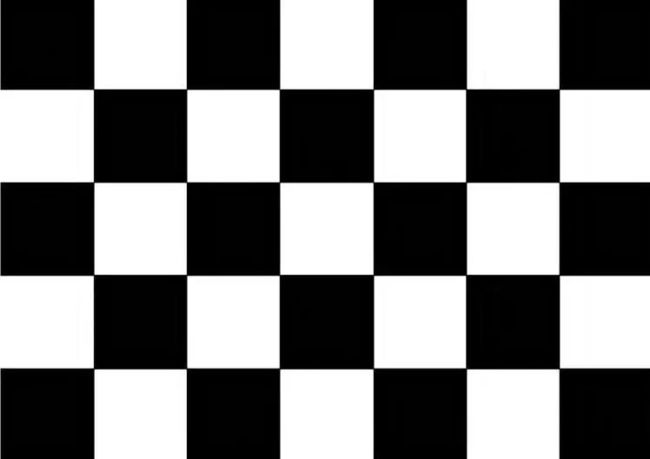 棋盘标定格
棋盘标定格
当相机拍摄标定板的图像时,通过相应的图像检测算法,就可以获得每一个角点在像素坐标系下的坐标,进而获得相机的内外参矩阵和畸变参数。需要注意的是,张正友标定法只考虑了径向畸变,没有考虑切向畸变。
以上就是本期的全部分享。至于张正友标定法如何推导等更多内容,记得持续关注「智星崛起」!