两轮差速小车循线控制原理分析
硬件资料设定:小车驱动来自于两个相同的电机,转向依靠两轮差速实现,小车前后左右安装超声波传感器,前后各一个,左右各两个;
功能目标:假设小车左侧有墙壁,通过超声波测距实现按指定距离沿墙行驶
参数设定:车轮半径r=3cm,车轮间距wd=10cm,车身长length=16cm,侧边超声波传感器前后各一个,假设一个在车头一个在车尾,间距=车身=length=16cm,小车线速度恒定v = 0.2m/s,距离墙d=10cm,假设超声波传感器以10Hz的频率采集距离。
在以上条件下,设定小车出发点,方向与墙平行,距离30cm,根据以上参数,设计小车控制算法。
1、根据超声波测距结果f_dist和b_dist计算车辆与墙的夹角θ与距离dist

由上图关系可知:
dist = f_dist*cos(θ)
tan(θ) = (b_dist-f_dist)/length
--> θ=arctan(b_dist-f_dist)/length)
--> dist = f_dist*cos(arctan(b_dist-f_dist)/length))
到这里,我们通过超声波测距对小车的位姿进行了计算,得到了dist和θ
2、计算线速度v、角速度omega,与车轮转速的关系
车轮通过电机控制,电机通过PWM控制,上位机可以控制的是电机PWM控制的占空比,再进一步,就是上位机可以直接控制车轮的转速,假设左右车轮转速分别为omega_l和omega_r,那么对应两个轮子的线速度分别是v_l和v_r,二者关系为:
v_l = 2*pi*r*(omega_l/2/pi) = omega_l*r
同理:v_r = omega_r*r
小车通过两轮差速驱动,车轮速度一致时走直线,不一致时走弧线,走弧线时,两个轮子所走弧线以及车实际的轨迹是3个同心圆,而单位时间内走过的轨迹如下图:

上图中,v_l和v_r是单位时间内两个轮走过的轨迹,v是车辆实际速度,R是内车轮轨迹半径,wd为两个轮子的距离,omega为单位时间内车辆转过额角度,实际就是车辆角速度,这些参数有以下关系:
v_r/R = v_l/(R+wd)=v/(R+wd/2)=omega
--> v_r = R*omega
v_l = R*omega+wd*omega
v = omega*R + wd*omega/2
--> omega = (v_l-v_r)/wd = (v-v_r)*2/wd
v在上文我们设定为固定值0.2m/s,那么:
--> v_r = v - omega *wd/2
v_l = v + omega *wd/2
到此为止,我们得到了设定车辆角速度v,线速度omega时,科技计算出车轮线速度,根据线速度和车轮角速度关系,可以计算出上位机应该给车轮下达怎样的指令。
3、厘清各参数关系之后,我们来实现通过pid实现闭环控制小车,也就是通过第一步计算出的θ和dist,目标距离d,计算小车控制参数v(固定值0.2m/s)和omega:
首先看一下控制逻辑,下图控制逻辑是靠传感器数据驱动的,也可以设置为定时驱动,传感器数据采集以后放到固定位置,程序设置定时循环驱动计算和控制:
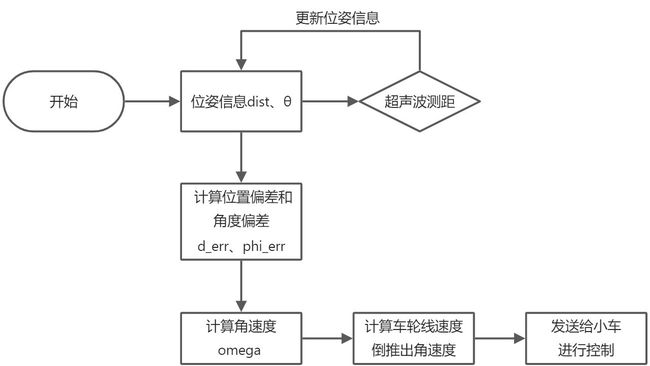
在上图中,dist和θ是即时计算出来的,
d_err = dist-d
phi_err = θ
另设:
Δt:车辆控制命令发送间隔
d_I_err:横向偏差积分项,每一轮+=d_err *Δt 需要设定范围,避免积分项太大
phi_I_err:航向角度偏差积分项,每一轮+=phi_err *Δt 需要设定范围,避免积分项太大
d_K:横向偏差比例系数
d_I:横向偏差积分系数
phi_K:航向角度偏差比例系数
phi_I:航向角度偏差积分系数
那么,在每一次控制循环中需要进行以下计算:
d_err = dist-d
phi_err = θ
d_I_err += d_err *Δt
判断积分项是否在范围内,超出范围则设为范围边界值
phi_I_err += phi_err *Δt
判断积分项是否在范围内,超出范围则设为范围边界值
omega = d_K*d_err+d_I*d_I_err+phi_K*phi_err +phi_I*phi_I_err
其中4个比例系数都需要通过设其它比例系数为0的情况下,计算omega和系数相关参数的关系来判定系数的符号,然后就根据车辆运行状态来调节各项参数。
若有收获,就点个赞吧