使用OpenCV显示SiftGPU提取的特征点和特征匹配
使用OpenCV显示SiftGPU提取的特征点和特征匹配,主要包括以下几个步骤:
- SiftGPU特征点提取
- OpenCV读入图像
- SiftGPU特征点类型到OpenCV特征点类型KeyPoint的转换
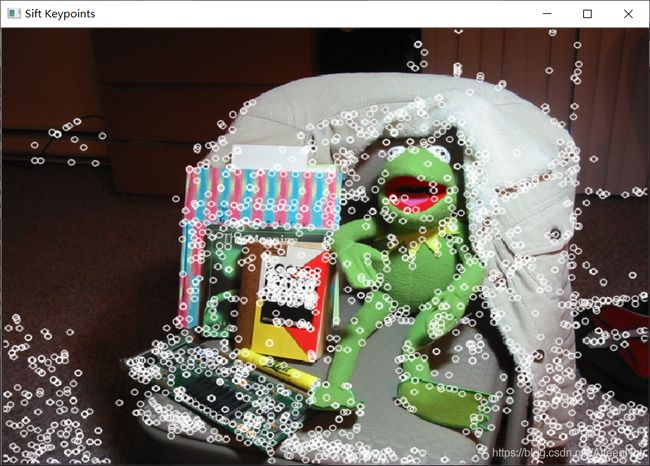
- OpenCV特征点显示
- SiftGPU描述子类型到OpenCV描述子类型的转换
- SiftGPU特征匹配
- SiftGPU特征匹配到OpenCV匹配DMatch类型的转换
具体代码如下:
代码采用image.txt输入待处理的图像路径,此处根据自己实际处理的图像自行设置。
#include (0, 0);
//float cmin = _cvDes.at(0, 0);
//for (int cimm = 0; cimm < _cvDes.rows; ++cimm){
// for (int cjmm = 0; cjmm < 128; ++cjmm){
// if (cmax < _cvDes.at(cimm,cjmm))
// cmax = _cvDes.at(cimm, cjmm);
// if (cmin > _cvDes.at(cimm, cjmm))
// cmin = _cvDes.at(cimm, cjmm);
// }
//}
//cout << "OpenCV Descriptors Max= " << cmax << " , Min=" << cmin << endl;
cvDescriptors.push_back(_cvDes);
}
map<pair<int, int>, vector<DMatch>> matches_matrix;
map<pair<int, int>, int> matches_num;
SiftMatchGPU matcher;
matcher.VerifyContextGL();
for (int i = 0; i < imgCount - 1; ++i){
for (int j = i + 1; j < imgCount; ++j){
matcher.SetDescriptors(0, num[i], &descriptors[i][0]);
matcher.SetDescriptors(1, num[j], &descriptors[j][0]);
int(*match_buf)[2] = new int[num[i]][2];
int num_match = matcher.GetSiftMatch(num[i], match_buf);
matches_num[make_pair(i, j)] = num_match;
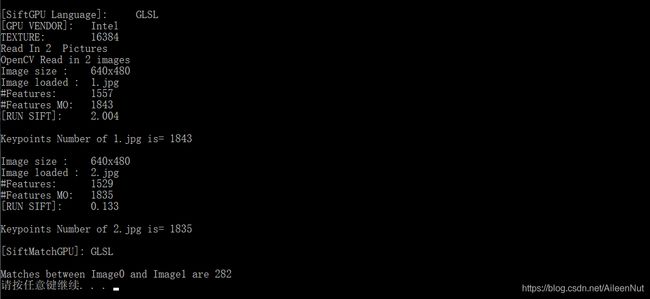
cout << "Matches between Image" << i << " and Image" << j << " are " << num_match << endl;
//定义OpenCV的match类型,并赋值quryIdx和trainIdx
vector<DMatch> matches_tmp;
for (int mk = 0; mk < num_match; ++mk){
DMatch match;
match.queryIdx = match_buf[mk][0];
match.trainIdx = match_buf[mk][1];
Point2f p1, p2;
p1.x = cvKeypoints[i][match.queryIdx].pt.x;
p1.y = cvKeypoints[i][match.queryIdx].pt.y;
p2.x = cvKeypoints[j][match.trainIdx].pt.x;
p2.y = cvKeypoints[j][match.trainIdx].pt.y;
float dist;
dist = (float)sqrtf(((p1.x - p2.x)*(p1.x - p2.x) + (p1.y - p2.y)*(p1.y - p2.y)));
match.distance = dist;
//cout << "Image" << i << " & Image" << j << " Match " << mk << ": " << endl;
//cout << "Idx: queryIdx is= " << match.queryIdx << " , trainIdx is= " << match.trainIdx << endl;
//cout << " Keypoint1: " << p1.x << " " << p1.y << endl;
//cout << " Keypoint2: " << p2.x << " " << p2.y << endl;
//cout << " Distance: " << match.distance << endl;
matches_tmp.push_back(match);
}
matches_matrix[make_pair(i, j)] = matches_tmp;
delete[] match_buf;
//OpenCV匹配显示
Mat cvImgMatches;
drawMatches(images[i], cvKeypoints[i], images[j], cvKeypoints[j], matches_tmp, cvImgMatches);
char showName[100];
sprintf(showName, "%s%d%s%d", "Matches between ", i, " and ", j);
namedWindow(showName, WINDOW_NORMAL);
imshow(showName, cvImgMatches);
waitKey(0);
}
}
system("pause");
return 0;
}
使用两幅Kermit图像进行测试的显示结果:

 控制台输出:
控制台输出: