从随机过程到马尔科夫链蒙特卡洛方法
1. Introduction
第一次接触到 Markov Chain Monte Carlo (MCMC) 是在 theano 的 deep learning tutorial 里面讲解到的 RBM 用到了 Gibbs sampling,当时因为要赶着做项目,虽然一头雾水,但是也没没有时间仔细看。趁目前比较清闲,把 machine learning 里面的 sampling methods 理一理,发现内容还真不少,有些知识本人也是一知半解,所以这篇博客不可能面面俱到详细讲解所有的 sampling methods,而是着重讲一下这个号称二十世纪 top 10 之一的算法—— Markov chain Monte Carlo。在介绍 MCMC 之前,我们首先了解一下 MCMC 的 Motivation 和在它之前用到的方法。本人也是初学者,错误在所难免,欢迎一起交流。
这篇博客从零开始,应该都可以看懂,主要内容包括:
- 随机采样
- 拒绝采样
- 重要性采样
- Metropolis-Hastings Algorithm
- Gibbs Sampling
2. Sampling
我们知道,计算机本身是无法产生真正的随机数的,但是可以根据一定的算法产生伪随机数(pseudo-random numbers)。最古老最简单的莫过于 Linear congruential generator:

式子中的 a 和 c 是一些数学知识推导出的合适的常数。但是我们看到,这种算法产生的下一个随机数完全依赖现在的随机数的大小,而且当你的随机数序列足够大的时候,随机数将出现重复子序列的情况。当然,理论发展到今天,有很多更加先进的随机数产生算法出现,比如 python 数值运算库 numpy 用的是 Mersenne Twister 等。但是不管算法如何发展,这些都不是本质上的随机数,用冯诺依曼的一句话说就是:
Anyone who considers arithmetic methods of producing random digits is, of course, in a state of sin.
要检查一个序列是否是真正的随机序列,可以计算这个序列的 entropy 或者用压缩算法计算该序列的冗余。
OK,根据上面的算法现在我们有了均匀分布的随机数,但是如何产生满足其他分布(比如高斯分布)下的随机数呢?一种可选的简单的方法是 Inverse transform sampling,有时候也叫Smirnov transform。拿高斯分布举例子,它的原理是利用高斯分布的累积分布函数(CDF,cumulative distribution function)来处理,过程如下图:
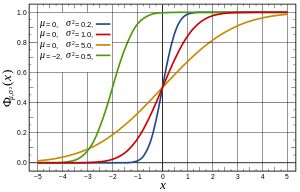
假如在 y 轴上产生(0,1)之间的均匀分布的随机数,水平向右投影到高斯累计分布函数上,然后垂直向下投影到 x 轴,得到的就是高斯分布。可见高斯分布的随机数实际就是均匀分布随机数在高斯分布的 CDF 函数下的逆映射。当然,在实际操作中,更有效的计算方法有 Box–Muller_transform (an efficient polar form),Ziggurat algorithm 等,这些方法 tricky and faster,没有深入了解,这里也不多说了。
3. Motivation
MCMC 可解决高维空间里的积分和优化问题:
-
上面一个例子简单讲了利用高斯分布的 CDF 可以产生高斯随机数,但是有时候我们遇到一些分布的 CDF 计算不出来(无法用公式表示),随机数如何产生?
-
遇到某些无法直接求积分的函数,如 e^{x^2},在计算机里面如何求积分?
-
如何对一个分布进行高效快速的模拟,以便于抽样?
-
如何在可行域很大(or large number of possible configurations)时有效找到最优解——RBM 优化目标函数中的问题。
-
如何在众多模型中快速找到更好的模型——MDL, BIC, AIC 模型选择问题。
3.1 The Monte Carlo principle
实际上,Monte Carlo 抽样基于这样的思想:假设玩一局牌的赢的概率只取决于你抽到的牌,如果用穷举的方法则有 52! 种情况,计算复杂度太大。而现实中的做法是先玩几局试试,统计赢的概率,如果你不太确信这个概率,你可以尽可能多玩几局,当你玩的次数很大的时候,得到的概率就非常接近真实概率了。
上述方法可以估算随机事件的概率,而用 Monte Carlo 抽样计算随即变量的期望值是接下来内容的重点:X 表示随即变量,服从概率分布 p(x), 那么要计算 f(x) 的期望,只需要我们不停从 p(x) 中抽样

当抽样次数足够的时候,就非常接近真实值了:

Monte Carlo 抽样的方法还有一个重要的好处是:估计值的精度与 x 的维度无关(虽然维度越高,但是每次抽样获得的信息也越多),而是与抽样次数有关。在实际问题里面抽样二十次左右就能达到比较好的精度。
但是,当我们实际动手的时候,就会发现一个问题——如何从分布 p(x) 中抽取随机样本。之前我们说过,计算可以产生均匀分布的伪随机数。显然,第二小节产生高斯随机数的抽样方法只对少数特定的问题管用,对于一般情况呢?
3.2 Rejection Sampling
Reject Sampling 实际采用的是一种迂回( proposal distribution q(x) )的策略。既然 p(x) 太复杂在程序中没法直接采样,那么我设定一个程序可抽样的分布 q(x) 比如高斯分布,然后按照一定的方法拒绝某些样本,达到接近 p(x) 分布的目的:

具体操作如下,设定一个方便抽样的函数 q(x),以及一个常量 k,使得 p(x) 总在 kq(x) 的下方。(参考上图)
- x 轴方向:从 q(x) 分布抽样得到 a。(如果是高斯,就用之前说过的 tricky and faster 的算法更快)
- y 轴方向:从均匀分布(0, kq(a)) 中抽样得到 u。
- 如果刚好落到灰色区域: u > p(a), 拒绝, 否则接受这次抽样
- 重复以上过程
用均匀分布拒绝抽样来近似两个高斯混合分布的代码如下:
rejectionsampling.py
 View Code
View Code
在高维的情况下,Rejection Sampling 会出现两个问题,第一是合适的 q 分布比较难以找到,第二是很难确定一个合理的 k 值。这两个问题会导致拒绝率很高,无用计算增加。
3.3 Importance Sampling
Importance Sampling 也是借助了容易抽样的分布 q (proposal distribution)来解决这个问题,直接从公式出发:

其中,p(z) / q(z) 可以看做 importance weight。我们来考察一下上面的式子,p 和 f 是确定的,我们要确定的是 q。要确定一个什么样的分布才会让采样的效果比较好呢?直观的感觉是,样本的方差越小期望收敛速率越快。比如一次采样是 0, 一次采样是 1000, 平均值是 500,这样采样效果很差,如果一次采样是 499, 一次采样是 501, 你说期望是 500,可信度还比较高。在上式中,我们目标是 p×f/q 方差越小越好,所以 |p×f| 大的地方,proposal distribution q(z) 也应该大。举个稍微极端的例子:

第一个图表示 p 分布, 第二个图的阴影区域 f = 1,非阴影区域 f = 0, 那么一个良好的 q 分布应该在左边箭头所指的区域有很高的分布概率,因为在其他区域的采样计算实际上都是无效的。这表明 Importance Sampling 有可能比用原来的 p 分布抽样更加有效。
但是可惜的是,在高维空间里找到一个这样合适的 q 非常难。即使有 Adaptive importance sampling 和 Sampling-Importance-Resampling(SIR) 的出现,要找到一个同时满足 easy to sample 并且 good approximations 的 proposal distribution, it is often impossible!
4. MCMC Algorithm
上面说了这么多采样方法,其实最终要突出的就是 MCMC 的过人之处。MCMC 的绝妙之处在于:通过稳态的 Markov Chain 进行转移计算,等效于从 P(x) 分布采样。但是在了解 MCMC 具体算法之前,我们还要熟悉 Markov Chain 是怎么一回事。
4.1 Markov Chain
Markov Chain 体现的是状态空间的转换关系,下一个状态只决定与当前的状态(可以联想网页爬虫原理,根据当前页面的超链接访问下一个网页)。如下图:
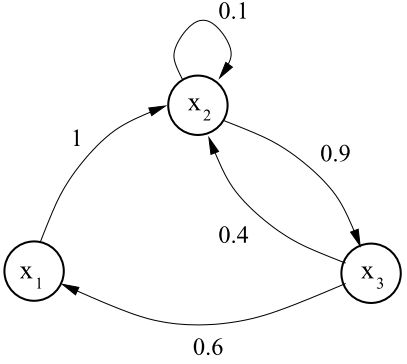
这个状态图的转换关系可以用一个转换矩阵 T 来表示:
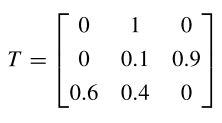
举一个例子,如果当前状态为 u(x) = (0.5, 0.2, 0.3), 那么下一个矩阵的状态就是 u(x)T = (0.18, 0.64, 0.18), 依照这个转换矩阵一直转换下去,最后的系统就趋近于一个稳定状态 (0.22, 0.41, 0.37) (此处只保留了两位有效数字)。而事实证明无论你从那个点出发,经过很长的 Markov Chain 之后都会汇集到这一点。
考虑一般的情况,满足什么条件下经过很长的 Markov Chain 迭代后系统分布会趋近一个稳定分布,即最后的 u(x) 等效于从目标分布 p(x) 采样。大概的条件如下(自己随便总结的,可能有遗漏和错误):
- Irreducibility. 即图是联通的,T 矩阵不能被切豆腐一样划分成小方块,举个例子,比如爬虫爬不到内部局域网的网页
- Aperiodicity. 即图中遍历不会陷入到一个死圈里,有些网站为了防机器人,会专门设置这种陷阱
- Detailed Balance,这是保证系统有稳态的一个重要条件,详细说明见下面。
假设 p(x) 是最后的稳态,那么 detailed balance 可以用公式表示为:

什么意思呢?假设上面状态图 x1 有 0.22 元, x2 有 0.41 元,x3 有 0.37 元,那么 0.22×1 表示 x1 需要给 x2 钱,以此类推,手动计算,可以发现下一个状态每个人手中的钱都没有变。值得说明的是,这里体现了一个很重要的特性,那就是从一个高概率状态 xi 向一个低概率状态 x(i-1) 转移的概率等于从这个低概率状态向高概率状态转移的概率(reversible,至于要不要转移又是另外一回事)。当然,在上面一个例子中,情况比较特殊,等号两边其实都是同一个东西。马氏链的收敛性质主要由转移矩阵决定, 所以基于马氏链做采样的关键问题是如何构造转移矩阵,使得平稳分布恰好是我们要的分布p(x)。但是考虑一维的情况,假设 p(x) 是一维高斯分布,x 是根据 markov chain 得到的一个样本,依照上面的等式,那么我们可以根据转移矩阵 T左 和 T右 (这里实际是 proposal distribution)来得到 p(xi) 和 p(x(i-1)) 的比率,进而按照一定的概率对这两个样本进行选择。通过大量这样的处理,得到样本就符合原始的 p(x) 分布了。这就是 MH 算法的基本原理。
4.2 Metropolis-Hastings Algorithm
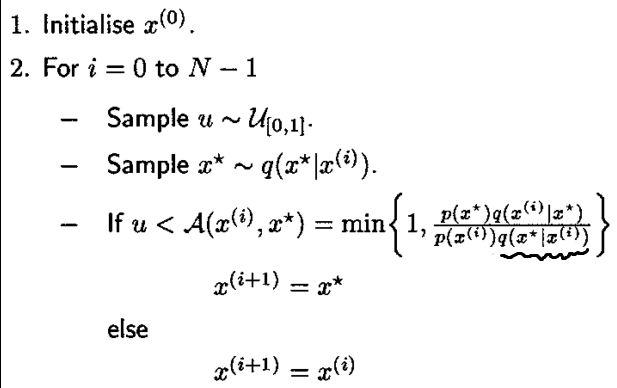
举个例子,我们要用 MH 算法对标准高斯分布进行采样,转移函数(对称)是方差为 0.05 的高斯矩阵,上述算法过程如下:
- 选取一个随机点 x0,作为一个采样点
- 以 x0 为中心,以转移函数为分布采取随机点 x1
- 以算法中的 A 概率接受 x1, 否则接受 x0
- 重复第二步第三步
注意到高斯分布是一个径向基函数,上面算法画波浪线的部分相等。
matlab 代码如下:
n = 250000;
x = zeros(n, 1);
x(1) = 0.5;
for i = 1: n-1
x_c = normrnd(x(1), 0.05);
if rand < min(1, normpdf(x_c)/normpdf(x(i)))
x(i+1) = x_c;
else
x(i+1) = x(i);
end
endMH 算法中的 proposal distribution q(x) 也是需要小心确定的,详细知识可以查阅这篇介绍论文 (An introduction to MCMC for machine learning, Andrieu, Christophe). 可以看到,这个算法和模拟退火算法的思想是非常相似的,但是在模拟退火算法过程中,随着时间的增加,接受值大的区域的概率越来越高,直到找到最高点。
4.3 Gibbs Sampling
Gibbs Sampling 实际上是 MH 算法的一个变种。具体思路如下:假设在一定温度下一定量的分子在容器里做无规则的热运动,如何统计系统的能量呢?同样,我们用 Monte Carlo 的思想进行统计计算。我们假设所有的分子静止在某一个时刻,这是初识状态。固定其他的分子,根据分子间的作用力对其中一个分子进行移动,也就是说在该分子以一定的概率移动到领域的某一个地方,移动完了之后再静止。然后基于移动后的状态对下一个分子进行同样的移动操作...直到所有的分子移动完毕,那么现在的状态就是 Monte Carlo 采样的第二个样本。依照这样的顺序采样下去,我们对于这个系统就能计算一个统计意义上的能量了。从条件分布的角度来看,算法过程如下:
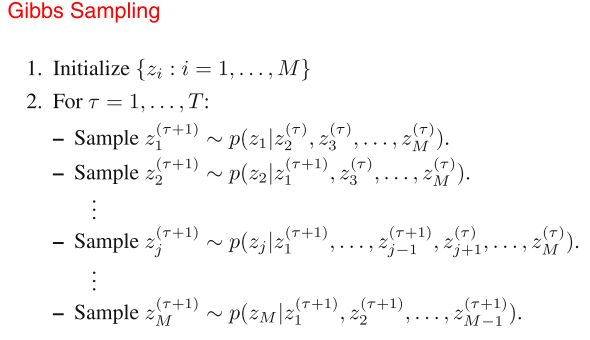
总体来讲,Gibbs Sampling 就是从条件概率中选择一个变量(分子),然后对该变量(分子)进行采样。当所有变量采样完毕之后,就得到了后面的一个状态,从而完成了对系统配置的采样。在 deep learning 的 RBM 中,gibbs 采样是已知权重参数和一个 v 变量,通过采样得到 h。通过 h 采样又可以得到另一个 v ,如此交替采样,就可以逐渐收敛于联合分布了。
Gibbs.py (对高斯分布进行 Gibbs 采样)
View Code
ps:
modified in 2013.11.1: 偶然发现统计之都有一篇类似的博客,gibbs采样解释得更加详细更加恰当,^_^,请点击这里
参考文献:
[1] PRML, chapter 11
[2] An introduction to MCMC for machine learning, Andrieu, Christophe
[3] 随机模拟的基本思想和常用采样方法(sampling)
[4] youtube 上的讲解 MCMC 的视频