Go分布式爬虫笔记(二十一)
文章目录
- 21 切片和哈希表
- 切片
-
- 底层结构
- 截取
- 扩容
- 哈希表
-
- 原理
- 哈希碰撞
-
- 拉链法
- 开放寻址法(Open Addressing)
- 读取
- 重建原理
- 删除原理
- 思考题
-
- Go 的哈希表为什么不是并发安全的?
- 在实践中,怎么才能够并发安全地操作哈希表?
-
- 拉链法
- 开放寻址法(Open Addressing)
21 切片和哈希表
切片
下面的代码中,foo 与 bar 最后的值是什么?
foo := []int{0,0,0,42,100}
bar := foo[1:4]
bar[1] = 99
fmt.Println("foo:", foo)
fmt.Println("bar:", bar)
// foo: [0 0 99 42 100]
// bar: [0 99 42]
下面程序输出什么?
x := []int{1, 2, 3, 4}
y := x[:2]
fmt.Println(cap(x), cap(y))
y = append(y, 30)
fmt.Println("x:", x)
fmt.Println("y:", y)
// Output
// 4, 4
// 1,2,30,4
// 1,2,30
底层结构
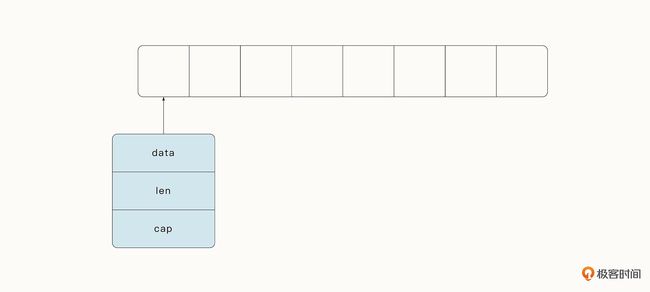
和 C 语言中的数组是一个指针不同,Go 中的切片是一个复合结构。一个切片在运行时由指针(data)、长度(len)和容量(cap)三部分构成。
type SliceHeader struct {
Data uintptr // 指向切片元素对应的底层数组元素的地址。
Len int // 对应切片中元素的数目,总长度不能超过容量。
Cap int // 提供了额外的元素空间,可以在之后更快地添加元素。容量的大小一般指的是从切片的开始位置到底层数据的结尾位置的长度。
}
截取
切片在被截取时的一个特点是,截取后的切片长度和容量可能会发生变化。
和数组一样,切片中的数据仍然是内存中一片连续的区域。要获取切片某一区域的连续数据,可以通过下标的方式对切片进行截断。被截取后的切片,它的长度和容量都发生了变化。就像下面这个例子,numbers 切片的长度为 8。number1 截取了 numbers 切片中的第 2、3 号元素。number1 切片的长度变为了 2,容量变为了 6(即从第 2 号元素开始到元素数组的末尾)。
numbers:= []int{1,2,3,4,5,6,7,8}
// 从下标2 一直到下标4,但是不包括下标4
numbers1 :=numbers[2:4]
// 从下标0 一直到下标3,但是不包括下标3
numbers2 :=numbers[:3]
// 从下标3 一直到结尾
numbers3 :=numbers[3:]
切片在被截取时的另一个特点是,被截取后的数组仍然指向原始切片的底层数据。
例如之前提到的案例,bar 截取了 foo 切片中间的元素,并修改了 bar 中的第 2 号元素。
foo := []int{0,0,0,42,100}
bar := foo[1:4]
bar[1] = 99

这时,bar 的 cap 容量会到原始切片的末尾,所以当前 bar 的 cap 长度为 4。
这意味着什么呢?我们看下面的例子,bar 执行了 append 函数之后,最终也修改了 foo 的最后一个元素,这是一个在实践中非常常见的陷阱。
foo := []int{0, 0, 0, 42, 100}
bar := foo[1:4]
bar = append(bar, 99)
fmt.Println("foo:", foo) // foo: [0 0 0 42 99]
fmt.Println("bar:", bar) // bar: [0 0 42 99]
//解决
foo := []int{0,0,0,42,100}
bar := foo[1:4:4] // 在截取时指定容量:
bar = append(bar, 99)
fmt.Println("foo:", foo) // foo: [0 0 0 42 100]
fmt.Println("bar:", bar) // bar: [0 0 42 99]
foo[1:4:4] 这种方式可能很多人没有见到过。这里,第三个参数 4 代表 cap 的位置一直到下标 4,但是不包括下标 4。 所以当前 bar 的 Cap 变为了 3,和它的长度相同。当 bar 进行 append 操作时,将发生扩容,它会指向与 foo 不同的底层数据空间。
扩容
Go 语言内置的 append 函数可以把新的元素添加到切片的末尾,它可以接受可变长度的元素,并且可以自动扩容。如果原有数组的长度和容量已经相同,那么在扩容后,长度和容量都会相 应增加。
不过,Go 语言并不会每增加一个元素就扩容一次,这是因为扩容常会涉及到内存的分配,频繁扩容会减慢 append 的速度。append 函数在运行时调用了 runtime/slice.go 文件下的 growslice 函数:
func growslice(et *_type, old slice, cap int) slice {
newcap := old.cap
doublecap := newcap + newcap
if cap > doublecap {
newcap = cap
} else {
if old.len < 1024 {
newcap = doublecap
} else {
for 0 < newcap && newcap < cap {
newcap += newcap / 4
}
if newcap <= 0 {
newcap = cap
}
}
}
...
}
- 如果新申请容量(cap)大于旧容量(old.cap)的两倍,则最终容量(newcap)是新申请的容量(cap);
- 如果旧切片的长度小于 1024,则最终容量是旧容量的 2 倍,即“newcap=doublecap”;
- 如果旧切片的长度大于或等于 1024,则最终容量从旧容量开始循环增加原来的 1/4,直到最终容量大于或等于新申请的容量为止;
- 如果最终容量计算值溢出,即超过了 int 的最大范围,则最终容量就是新申请容量。
切片动态扩容的机制启发我们,在一开始就要分配好切片的容量。否则频繁地扩容会影响程序的性能。所以我们可以将爬虫项目的容量扩展到 1000,注意长度需要为 0。
var seeds = make([]*collect.Request, 0, 1000)
哈希表
实践中,我们通常将哈希表看作 o(1) 时间复杂度的操作,可以通过一个键快速寻找其唯一对应的值(Value)。
在很多情况下,哈希表的查找速度明显快于一些搜索树形式的数据结构,因此它被广泛用于关联数组、缓存、数据库缓存等场景。
原理
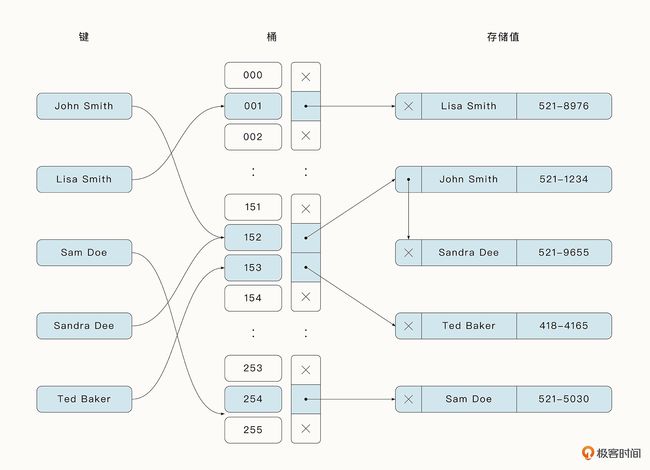
哈希表的原理是将多个键 / 值对(Key/Value)分散存储在 Buckets(桶)中。给定一个键(Key),哈希(Hash)算法会计算出键值对存储的桶的位置。找到存储桶的位置通常包括两步,伪代码如下:
hash = hashfunc(key)
index = hash % array_size
哈希碰撞
哈希函数在实际运用中最常见的问题是哈希碰撞(Hash Collision),即不同的键使用哈希算法可能产生相同的哈希值。如果将 2450 个键随机分配到一百万个桶中,根据概率计算,至少有两个键被分配到同一个桶中的可能性超过 95%。哈希碰撞导致同一个桶中可能存在多个元素,会减慢数据查找的速度。
避免哈希碰撞:
- 拉链法1
- 开放寻址法2
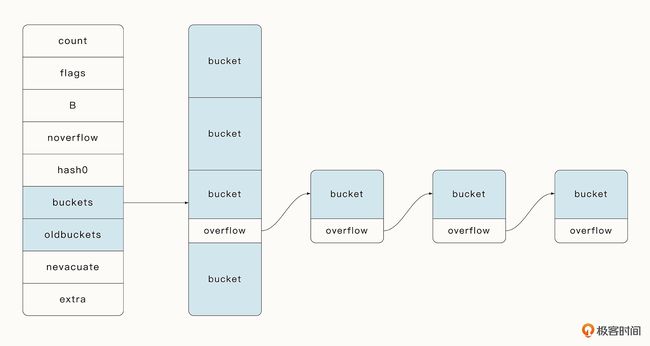
Go 语言中的哈希表采用的是优化的拉链法,它在桶中存储了 8 个元素用于加速访问。
拉链法
将同一个桶中的元素通过链表的形式进行链接,这是一种最简单、最常用的策略。随着桶中元素的增加,我们可以不断链接新的元素,而且不用预先为元素分配内存。
不足:
- 需要存储额外的指针来链接元素,这就增加了整个哈希表的大小。
- 由于链表存储的地址不连续,所以无法高效利用 CPU 缓存。
开放寻址法(Open Addressing)
这种方法是**将所有元素都存储在桶的数组中。**当必须插入新条目时,开放寻址法将按某种探测策略顺序查找,直到找到未使用的数组插槽为止。当搜索元素时,开放寻址法将按相同顺序扫描存储桶,直到查找到目标记录或找到未使用的插槽为止。

读取
- 通过上面的伪代码找到桶的位置
- 遍历桶中的 tophash 数组。
tophash 数组存储了 8 个元素用于加速访问。
如果在 tophash 数组中找到了相同的 hash 值,就可以通过指针的寻址操作找到对应的 Key 与 Value。 - 此外,在 Go 语言中还有一个溢出桶的概念。在执行 hash[key] = value 的赋值操作时,当指定桶中的数据超过 8 个时,并不会直接开辟一个新桶,而是将数据放置到溢出桶中,每个桶的最后都存储了 overflow,即溢出桶的指针。

- 在正常情况下,数据是很少会跑到溢出桶里面去的。同理,在 Map 执行查找操作时,如果 Key 的 hash 不在指定桶的 tophash 数组中,我们就需要遍历溢出桶中的数据。
重建原理
不过,如果溢出桶的数量过多,或者 Map 超过了负载因子大小,Map 就要进行重建。负载因子是哈希表中的经典概念:
负载因子 = 哈希表中的元素数量 / 桶的数量
负载因子的增大意味着更多的元素会被分配到同一个桶中,此时效率会减慢。试想一下,如果桶的数量只有 1 个,这个时候负载因子到达最大,搜索就和遍历数组一样了,它的复杂度为 o(n)。
Go 语言中的负载因子为 6.5,当哈希表负载因子的大小超过 6.5 时,Map 就会扩容,变为旧表的两倍。当旧桶中的数据全部转移到新桶后,旧桶就会被清空。Map 的重建还存在第二种情况,那就是溢出桶的数量太多。这时 Map 只会新建和原来一样大的桶,目的是防止溢出桶的数量缓慢增长导致内存泄露。

哈希表的重建过程提示我们,可以在初始化时评估并指定放入 Map 的数据大小,从而减少重建的性能消耗。
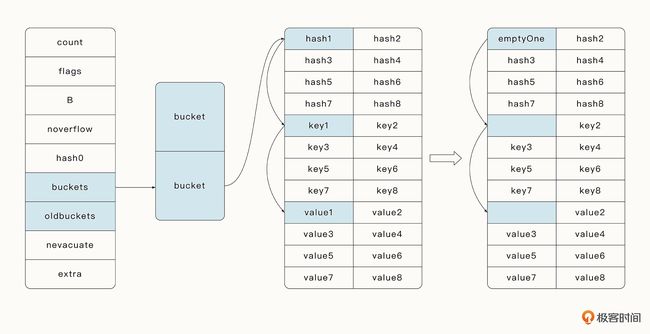
删除原理
当进行 Map 的 delete 函数时,delete 函数会根据 Key 找到指定的桶,如果存在指定的 Key,那么就释放掉 Key 与 Value 引用的内存。tophash 中的指定位置会存储 emptyOne,代表当前位置是空的。
同时,删除操作会探测当前要删除的元素之后是否都是空的。如果是, tophash 会存储为 emptyRest。这样做的好处是在进行查找时,遇到 emptyRest 可以直接退出,提高了查找效率。
思考题
Go 的哈希表为什么不是并发安全的?
在实践中,怎么才能够并发安全地操作哈希表?
写操作加锁,或者使用sync.Map;
「此文章为4月Day5学习笔记,内容来源于极客时间《Go分布式爬虫实战》,强烈推荐该课程!/推荐该课程」
拉链法
↩︎开放寻址法(Open Addressing)
↩︎