rovio论文解读,及工程应用经验总结
rovio标签:基于滤波(EKF),紧耦合(fully integrate visual features into the state of the Kalman filter)
优点:不必初始化,计算量小(稀疏图像块EKF)
目录
源码及安装使用(参考官网)
三篇原作论文
论文4个创新点
论文组织架构
Ⅱ filter setup,EKF滤波器建模:关键是状态空间的定义(加入了图像特征),状态更新过程
Ⅲ multilevel patch feature handling, 多级图像块特征处理策略
Ⅳ 实验
论文中的关键术语解释
rovio算法的假定前提条件
rovio工程应用要考虑的要点
1、传感器选型
2、时间同步
3、算法调参
一些思考
1、提取特征时,为何不直接用像素,而是图像块?
2、如何约束EKF状态空间的规模到一个合理范围,且维护稳定的状态(特征)?
rovio算法框架流程图
暂未搞清楚的地方
自己动手跑起来
源码及安装使用(参考官网)
https://github.com/ethz-asl/rovio
作者自己开发了一个EKF滤波库lightweight_filtering,rovio中的EKF通过调用该库实现,因此rovio编译安装依赖于此库。
三篇原作论文
- http://dx.doi.org/10.3929/ethz-a-010566547 (IROS 2015)
- http://dx.doi.org/10.1177/0278364917728574 (IJRR 2017)
作者博士大论文:《State Estimation for Legged Robots - Kinematics, Inertial Sensing, and Computer Vision》
论文4个创新点
以下分析论文http://dx.doi.org/10.3929/ethz-a-010566547 (IROS 2015)
首先,论文提出了VO中的几个核心问题,引出其创新点:
(1)consistency一致性、平滑度,此问题由VO数学建模固有非线性导致(inherent nonlinearity)。
解决方案2个:一是跟踪的特征点表示在本体坐标系,二是在计算雅可比时使用特定线性化点
(2)路标点特征表示方法:传统方法使用空间位置坐标,存在问题是初始化时尺度信息非常不确定,对后续估计跟踪不利影响。替代方法是采用bearing vector表示特征点。
4个创新点:针对每个创新点同时思考两个问题,why?作者为何这样做(有啥优点)? how?作者如何实现的?
(1)使用bearing vector和distance parameter来参数化表示点特征(降低了路标点表示维度有助于提升计算速度,提升连续性?与创新点4相呼应,bearing vector通常表示在相机坐标系下)
(2)EKF直接同时跟踪多个多级图像块特征,块亮度误差作为EKF的测量残差项
(3)使用QR分解降低最小二乘问题规模,加快EKF求解速度
(4)包含完全状态的EKF,该EKF为基于载体视角(估计的路标点位置属于本体坐标系,因此不存在累积误差)

论文组织架构
Ⅱ filter setup,EKF滤波器建模:关键是状态空间的定义(加入了图像特征),状态更新过程
A. EKF滤波器结构,状态空间定义
坐标系系统:惯性导航系,IMU本体系,相机系。
状态空间:r位置,q姿态,v线速度,u图像特征表示为bearing vector(一帧图像共跟踪N个特征,实验部分说同时跟踪50个特征下定位频率达20HZ)。其他:b加速度计陀螺仪偏差,c/z相机IMU外参,ρ特征距离
![]()
B. 状态预测
IMU-driven,由imu数据驱动的EKF状态预测
C. 状态更新
- 使用图像块亮度误差作为EKF的测量残差项
- 为了提高跟踪鲁棒性,针对运动物体或其他干扰,rovio采用基于Mahalanobis检测outliers并从状态空间剔除这些干扰特征
Ⅲ multilevel patch feature handling, 多级图像块特征处理策略
A. structure & warping
通过跟踪每个图像块内2个方位向量来计算affine warping matrix ?
B. alignment公式,QR分解
最小二乘问题建模
论文计算图像intensity errors来pre-align特征或来更新EKF状态,那么如何构建最小二乘问题呢?
通过计算各级金字塔图像I(输入)与多级图像块特征(已知)之间的亮度误差,即最小化亮度误差和,该误差作为驱动EKF状态更新的残差项。

C. 特征提取,特征筛选
特征的提取
- 使用何种特征?角点特征。
- 使用何种特征提取算法?采用一种快速角点检测算法来提取角点特征
- 如何选择有效特征?还是打分机制,采用adapted Shi-Tomasi score打分,好处(1)分数高低直接反映了alignment精度(2)允许计算1或2范数特征值,从而在角点特征稀少场景中能够转换为提取边线特征。
知识加油站:Shi-Tomasi score
我们知道Harris角点检测的打分公式为: R = λ1 λ2 - k( λ1 + λ2)²
但是Shi-Tomasi使用的打分函数为: R = min(λ1, λ2)
如果打分超过阈值,我们就认为它是一个角点。我们可以把它绘制到 λ1~ λ2空间中,就会得到下图:只有当 λ1和 λ2都大于最小值时,才被认为是角点(绿色区域)。比Harris角点检测的效果好
https://blog.csdn.net/qq_36387683/article/details/80550964

不稳定特征的剔除
为何要做特征筛选(剔除)?一帧图像提取的角点特征数量可能会非常巨大,不可能全部加入到EKF状态空间中进行跟踪。因此,需要对原始提取的特征进行筛选,只保留最稳定的那些特征。
如何筛选稳定特征,剔除不稳定特征?依然是打分机制,具体操作为计算特征跟踪分数,代表了被连续跟踪的情况,包含局部跟踪分数(最近若干帧)、全局跟踪分数(从最初被检测开始到当前帧)。这里需要设置一个分数阈值,可以是固定阈值,也可以为自适应阈值(论文采用)。
Ⅳ 实验
包括:实验设置、低速运动实验、高速运动实验、UAV飞行实验
实验设备:相机和IMU。使用双目相机,集成了IMU,且相机与IMU时间是硬同步的hardware time-synchronized,因此,论文实验效果很好。这也
性能:能够运行在UAV上,速率20HZ(每帧跟踪50个特征)
改进:(1)针对发散问题的处理策略(2)支持多相机,带来的好处为针对缺少平移运动的情况能够提高滤波器效果(3)在线标定支持估计相机内参
论文中的关键术语解释
patch:定义一个固定大小正方形图像块(例如8*8pixel)

patch feature:rovio使用固定尺寸正方形图像块特征,而非单个像素特征
multilevel patch feature:针对输入的多级金字塔图像对应的块特征,即每一级金字塔图像对应一级块特征
bearing vector: ,使用图像特征被以bearing vector形式加入到状态空间中
,使用图像特征被以bearing vector形式加入到状态空间中
参考 OpenGV--A library for solving calibrated central and non-central geometric vision problems
https://laurentkneip.github.io/opengv/page_how_to_use.html
方位向量:用2D(方位角,仰角)来表示3D路标位置,降低了信息维度,定义在相机坐标系。下图红色向量即为方位向量。

patch coordinate:![]()
patch alignment:块特征对齐,前后两帧图像中块特征的匹配,估计变换矩阵实现对齐
affine warping matrix:仿射变形矩阵(保持平行性)

patch intensity gradient:块亮度梯度
warp path:图像块仿射变换?
rovio算法的假定前提条件
任何算法都不是万能的,而是只能在有限特定环境(条件)下工作的,即算法数学建模需要满足一些假设条件。
假设1、各个特征之间的距离>图像块尺寸
假设2、图像块中所有像素点的亮度噪声值相同。
assume that the additive noise magnitude on the intensities is equal for every patch pixel(additive discrete Gaussian pixel intensity noise),这里的noise是相机模型观测噪声为离散高斯模型,代表每个像素的亮度噪声

rovio工程应用要考虑的要点
1、传感器选型
相机与IMU,尤其是IMU的性能直接影响位姿估计跟踪效果。建议用好一些IMU
2、时间同步
时间同步误差大将大大降低跟踪精度,建议采用支持硬时间同步的相机+IMU,或至少采用global-shutter相机,可选方案推荐:
(1)论文使用的装备
synchronized global-shutter camera (Aptina MT9-V034 at 20 Hz) and IMU (Analog Devices ADIS16488 at 200 Hz).


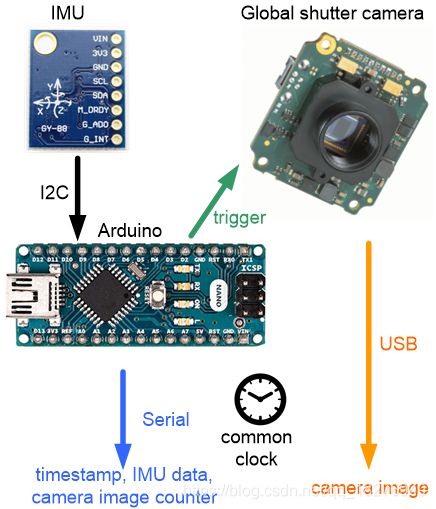
(2)网友开发的装备:使用一个全局快门相机、一个低端IMU,通过arduino实现时间硬同步,将同步时间戳发布出来了。以下给出几个重要参考网址:
软硬件环境、相机内参标定、相机IMU外参联合标定:http://grauonline.de/wordpress/?page_id=2014
bluefox2相机与IMU同步配置:http://grauonline.de/wordpress/?page_id=1951
Matrix-Vision Bluefox usb2.0 MLC cameras (bluefox2)全局快门相机ROS驱动:https://github.com/KumarRobotics/bluefox2卷帘快门(Rolling Shutter)与全局快门(Global Shutter,通过整幅场景在同一时间曝光实现的。Sensor所有像素点同时收集光线,同时曝光。)
https://blog.csdn.net/abcwoabcwo/article/details/93099982

3、算法调参
算法参数对rovio跟踪效果影响巨大,针对不同传感器与特定场景都需要重新调参
一些思考
1、提取特征时,为何不直接用像素,而是图像块?
论文Ⅲ.A部分及Ⅱ.C部分给出答案:好处如下:(1)首先,必须满足的条件是图像块允许直接计算亮度误差(反馈给EKF更新)(2)对于初始估计不准确及图像模糊情况具有较高鲁棒性(3)与传统重投影误差算法(需要根据相机内外参投影到图像平面计算像素误差)相比,图像块(不必投影,直接计算亮度误差)考虑了纹理特征,因此误差模型精度更高
2、如何约束EKF状态空间的规模到一个合理范围,且维护稳定的状态(特征)?
将图像块特征加入到状态空间中并使用EKF进行跟踪,从而构建了基于滤波的紧耦合VIO,但产生一个核心问题是:图像特征点太多了,如果全部加入到EKF状态空间,那么计算量将非常大,导致无法实时跟踪。那么如何解决呢?针对此问题的解决方案是rovio论文的一个创新点,做法其实挺直白:
(1)采用QR分解降低状态空间维度(降维打击),即减小了求解最小二乘问题的线性方程组的规模。
(2)对已存在状态空间中的图像块特征进行打分,高者留,低着走。具体方法很简单即通过统计该图像块连续n帧跟踪情况来打分。这种打分机制是动态更新的(非终身制),因此不会出现不定的特征还会占着茅坑不拉屎,这机制跟粒子滤波的粒子权重重采样相似(动态更新粒子权重,保留好粒子,剔除不良粒子)。
补充一下,上面说的计算量很大,具体是指什么计算量呢?
rovio通过计算图像块intensity errors即图像块像素亮度值误差构建最小二乘问题,通过高斯牛顿来求解这个最小二乘问题,图像块特征数量决定了线性方程组系数矩阵维度,因此,如果把所有特征都加进来进行处理,那矩阵维度必然超大,求解速度会很慢,所以计算量就是求解这个最小二乘问题的计算量。
rovio算法框架流程图
针对图像块包含以下3个核心操作:先提取块,EKF预测,再对图像块仿射变形,计算图像块亮度平方和最小误差作为EKF更新步骤中的残差
extract path:提取图像块特征(角点)
warp path:仿射变形?
align path:图像块匹配

暂未搞清楚的地方
主要是Ⅲ.A部分
1、affine warping

2、feature distance

自己动手跑起来
场景:室内,单目+imu安装在四足机器狗上,用于估计机器人运动定位及构建高程地形图。
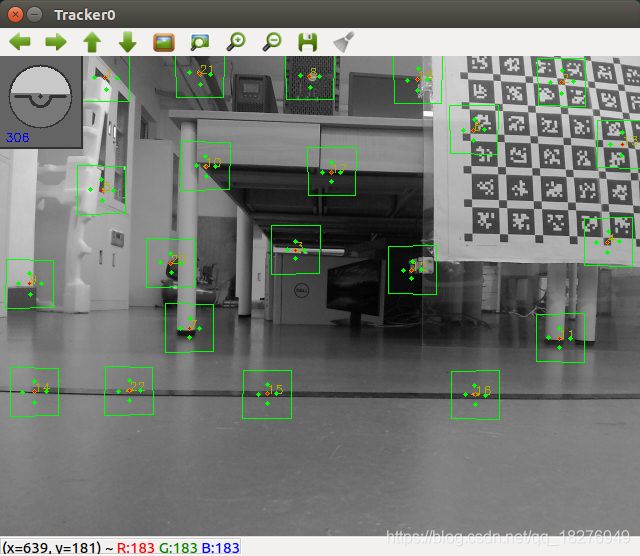
设备:bluefox2全局快门单目,xsens IMU,apritag标定板。使用了多种单目测试,单目与IMU安装也尝试了多种方式




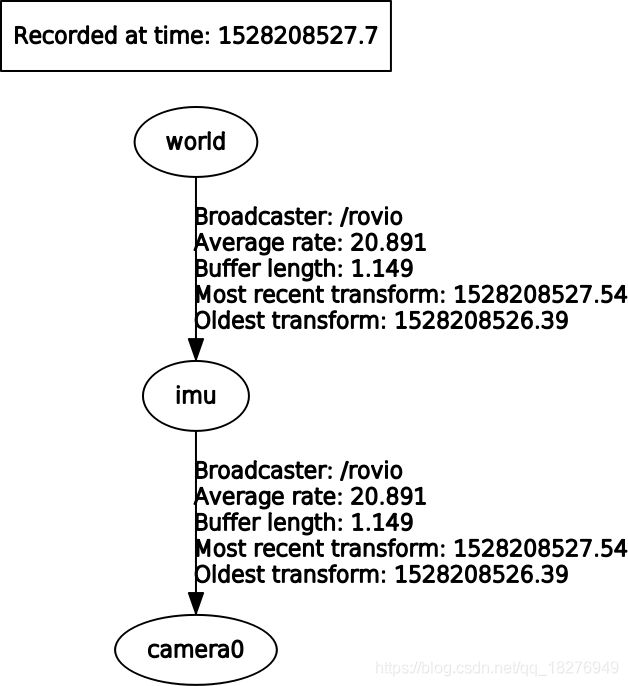
TF
ROS节点:VLP16三维激光雷达、单目相机、rovio、em建图、tm建图

运行效果:里程计定位输出


