线性代数知识
❀关于李永乐-线性代数基础班学习笔记。
第一章 行列式
1.1 行列式的概念
1.1.1 二、三阶行列式
若有二元一次方程组,进行加减消元:


根据相加相减的系数,可以提炼成二阶行列式

假设方程组系数行列式不为0,则可让分母做运算。

若解三元一次方程组,很自然会出现3个数加加减减。


注意只有二三阶才可以直接根据主副对角线判定 前面的正负。

1.1.2 排列、逆序、逆序数






- 第二个例子:对于2,针对1有逆序;对于4,针对3、1有逆序;对于3,针对1有逆序。
- 第四个例子:自然排列逆序数是0
1.1.3 n阶行列式概念


用【逆序数】来判断 前面的正负。

【上三角行列式】
>
(要想行列式不为0,便只有这一种可能性)



【副对角线行列式】
注意是四阶,不可以直接根据副对角线,就判断前面是 负号。



【法一】
【法二】



1.2 行列式的性质





【法一】倍加性质
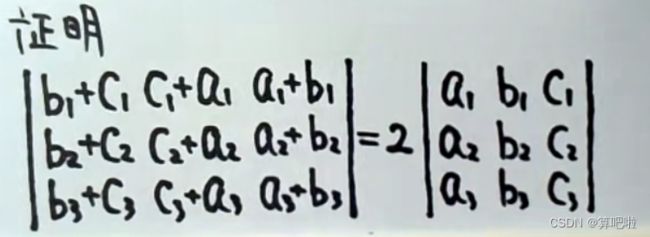
c2-c1;c3-c1
c1+c2+c3
c2、c3分别提取公因数-1
【法二】用性质5,和的拆开
- 第一、第二、第三列均可拆成2个,则一共可以拆成8个行列式;
- 在这8个行列式中,存在两列是相同的情况,则行列式值为0;
- 则把不为0的写出来:
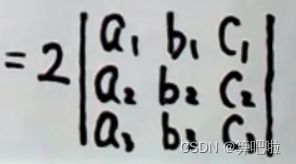
用两行互换的性质(换两次正负号不变)





1.3 行列式按行(列)展开公式
1.3.1 余子式、代数余子式

- 去掉一行及一列,剩下的元素 就是余子式
- 带正负号的这样一个n-1阶行列式 就是aij的代数余子式



1.3.2 展开公式
引入:




证明:
- 注意A31与a31的数值大小无关…类似A32、A33。
- 因此构造的新的行列式B,第三行用系数表示
按照第三行展开。又这个行列式两行相同,因此行列式值=0



1.3.3 重要公式

(3) 对角线有一块为0。mn是行列式AB的阶数。

法2:




r2、r3、r4均加上 -a倍的r1
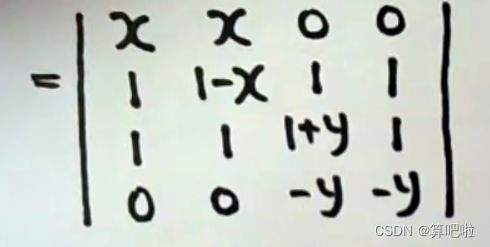
**【分析2】**不看主对角线,每一列都一样。就是隐形的爪形
变成爪形后,把每一列都加到第一列
**【分析三】**把上一行的-1倍加到下一行(由第三行开始,即第三行-1倍加到第四行)
再把每一列都加到第一列
**【分析四】**给a加上0,构成两个数相加。然后可以拆成16个行列式。在这些行列式中,存在大多数两列相同的情况(即行列式值为0)






【法一】 r1加上-1 r2;r4加上-1 r3
c2-c1;c3-c4
按第一行展开
**【法二】**变成爪形:r2、r3、r4分别加上-1 r1





逐行相加:先把第一行降价到第二行
把第二行加到第三行
第三行加到第四行




【法一】
【法二】



c3+(-2 c1)






1.4 克拉默法则
n个方程n个未知数的方程组:


求x几(几为下标),就把第几列换成常数项。
【克拉默法则更可能用在小的证明题上】









第二章 矩阵
【基础,应防混淆】
2.1 概念、运算
❗注意乘法的复习!
❗注意以下符号的含义

2.1.1 概念


行阶梯矩阵(不唯一)
- 第一行不是行阶梯矩阵:零行不在矩阵的底部
- 第二行不是行阶梯矩阵:第三行的7是主元,但其下面 的元素不是0
- 第三行是行阶梯矩阵


行最简矩阵(唯一 )
- 1、2不是行最简矩阵
- 3、4是行最简矩阵


解:





2.1.2 运算
(1)加法


(2)数乘


(3)乘法

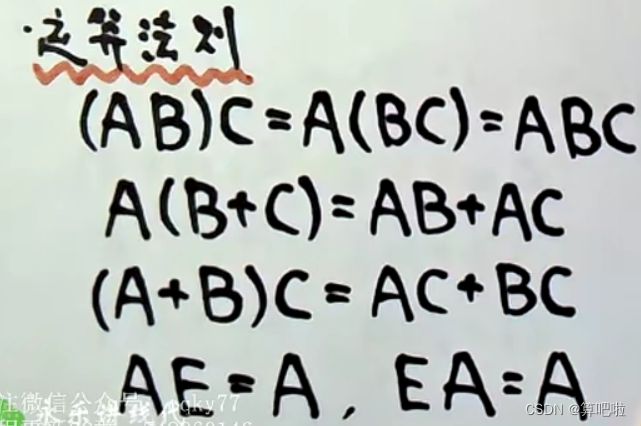
性质






(4)转置


关于转置的 矩阵/数 的重组
【由以下可得:第一排是矩阵,第二排是数】
- 列在前面,行在后面 得到的是一个矩阵
- 这样得到的行列式,两行成比例,即行列式值为0。则这种矩阵是秩为1的关系。
- 以下得到的两个矩阵 互为转置的关系
- 行在前面,列在后面 得到的是一个数
- 下面两数相等,就是矩阵的迹【矩阵的迹就是主对角线元素的和】





- 这个矩阵是个对称矩阵


❀例题
(2)两行成比例,是秩为1的矩阵






2.2 ❀伴随矩阵、❀可逆矩阵
❗
单位矩阵恒等变形的技巧
2.2.1 伴随矩阵




证明:
- a11A11+a12A12是行列式A按照第一行展开,即行列式的值
- 【某一行的所有元素与另一行相应元素的代数余子式乘积之和等于0】。即 a11A21+a12A22=0



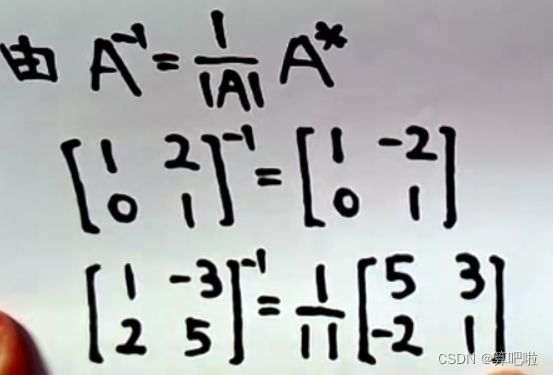
二阶矩阵的伴随



❀例题




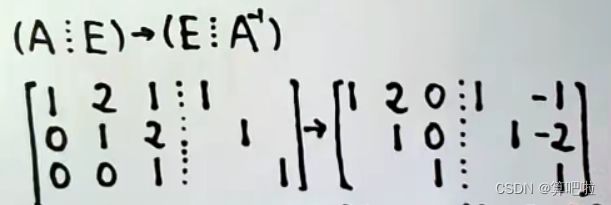
2.2.2 可逆矩阵

注意单位矩阵恒等变形的技巧





(1)逆矩阵性质



❀例题







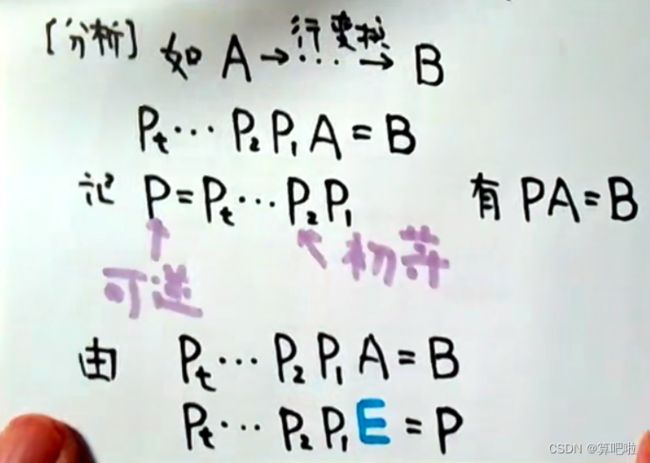
2.3 初等变换、❀初等矩阵
❗

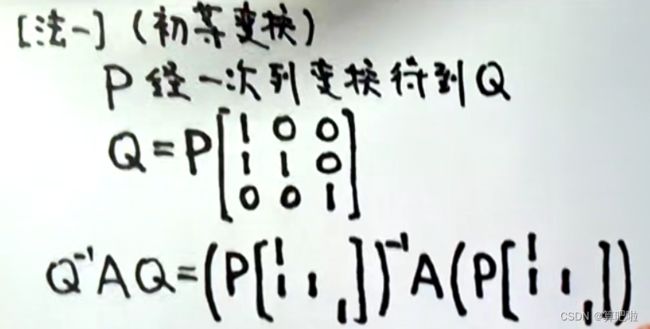
【初等矩阵都有两种理解方法(如右列)】


【左乘是行变换,右乘是列变换】
【初等矩阵在第一个,第二个到第三个做的变化,就是初等矩阵在单位矩阵上做的变化】
【初等矩阵在第二个,初等矩阵由单位矩阵作出的变化就是 第一个加上这个变化,得出第三个的结果】



【初等矩阵逆矩阵的三个公式】:
【倍加矩阵的逆矩阵 是把倍数改成相反数】

【两行互换,初等矩阵纹丝不动,就是它自己】

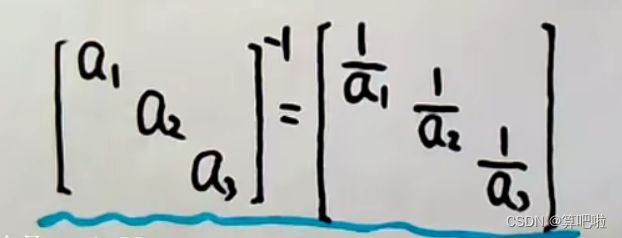
【对角矩阵的逆矩阵 是取倒数】

❀例题
【有下标的题目得观察下标】
但是p2是将第一行加到第三行





【将文字变为符号】


2.4 分块矩阵
❗
对应的题型
第一种:
第二种:方程组解
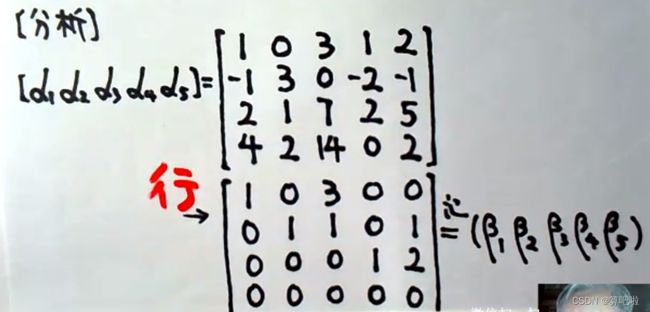
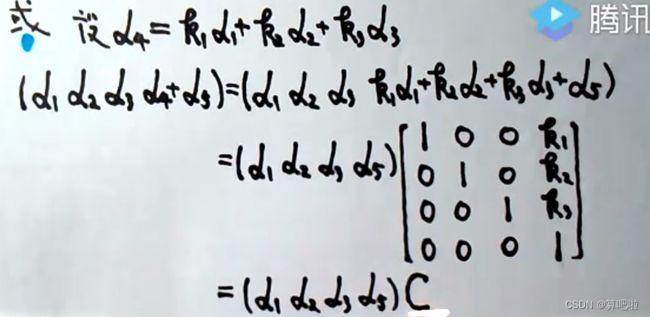
第三种:向量;秩 (既可按行分块,也可按列分块)
【AC按列分块】
【BC按行分块】




【BC按列分块】
【通过解方程组得出B】



(1)运算


❀例题
【做乘法:分四块】



【求逆:分四块】



把B矩阵按列分块


2.5 方阵A的行列式



❀例题




第三章 向量*

3.1 概念






【加法与数乘的运算法则】

3.2 线性表示







❀例题


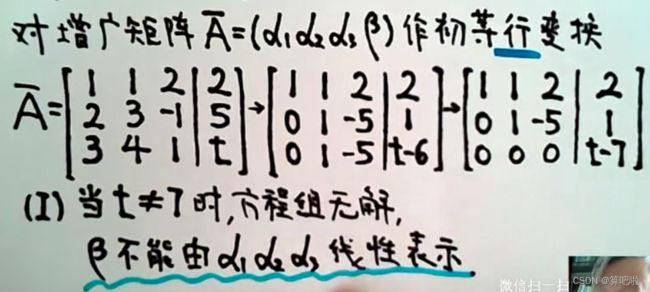


【可用爪形消元】











3.3 相关、无关

有零向量、有成比例的向量,这样的向量组肯定是线性相关的。
对于任何一个向量组 这个式子永远成立:
相关、无关的区别:有且仅有 以上式子能使结果为0的 才是线性无关。
























❀例题








3.4 秩(向量组、矩阵)
3.4.1 向量组的秩



一个向量组的极大线性无关组多数情况下答案不唯一。【极大线性无关组中的向量个数是相同的】
向量组中的任何一个向量都可以由极大线性无关组线性表出







3.4.2 矩阵的秩



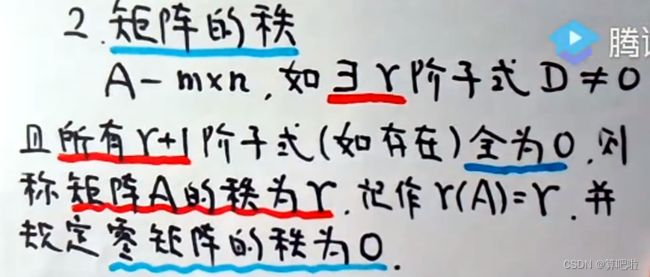













3.3.4 秩的性质




❀例题
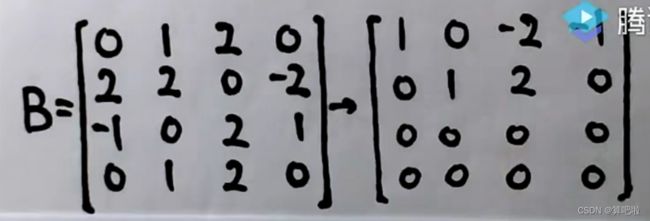
【化为行最简】
则秩=3
极大线性无关组:找主元


法一:
法二:
法三:





【法二】

3.5 正交矩阵
第四章 方程组


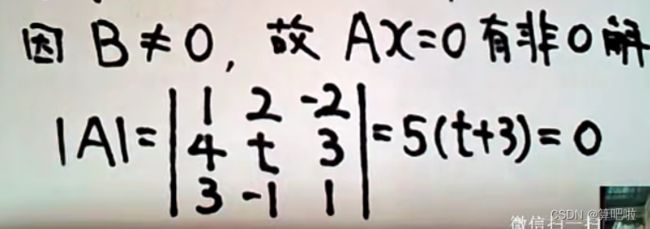
4.1 齐次方程组
齐次方程组不存在无解的情况。【最少都有零解】










由定理可知有两个解向量。




化成行最简后【自由向量是a3、a5.因此得到红笔书写的】。然后n1的黑笔三个数是a3列的相反数,n2的是a5列的相反数
【法二】




4.2 非齐次方程组




4.3 解的性质



❀例题




方程组通解:
【法二】

















4.4 方程组的应用
4.4.1 通过解方程组得到所需矩阵
解题思路:
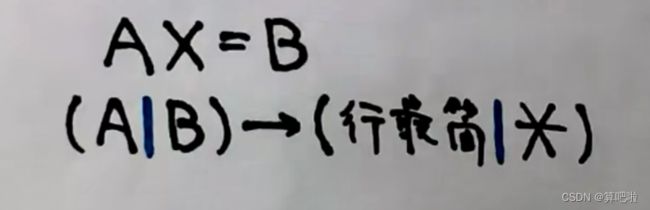
可以得到齐次方程组





分析:解方程组,求出方程组的解。拼成所需矩阵X。(注意把握矩阵X的行列尺寸)
解这两个方程组
【两个方程组系数项相同,考虑将两个增广矩阵拼接在一起】然后化成行最简






第五章 特征值



5.1 特征值、特征向量

一个特征值的特征向量有无数多个。






(1)特征值的和就是A矩阵 主对角线元素的和(即迹)
(2)特征值的乘积 就是行列式的值

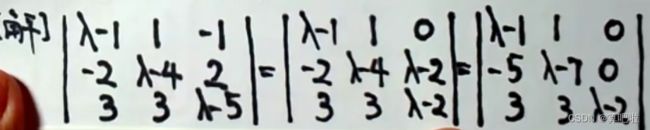
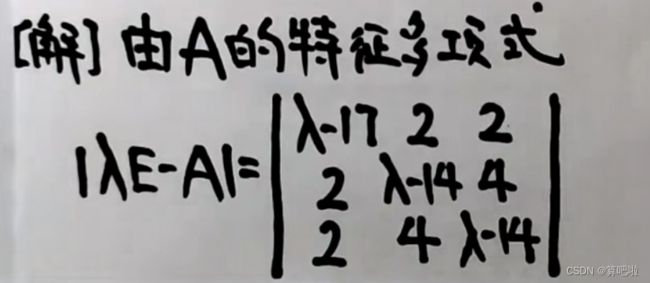
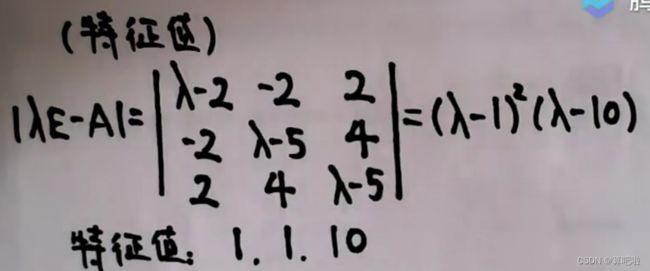
【求特征值、特征向量方法:】






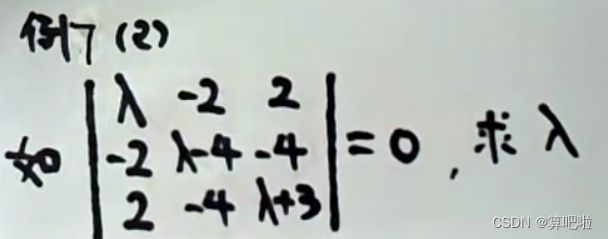
❀例题
则可求得特征值















【上面两道题都是有重根的情况】可以发现此时有的矩阵有两个无关的特征向量,有的只有1个。这有重根的情况 与后面 一个矩阵是否与对角矩阵相似 有关联。
…






【满足题设关系的A矩阵有无数多个,即A矩阵是不唯一的。因此此处只能求得特征值的取值范围(即有多少个1不知道,多少个-3也不知道)。因此用“或”】
举例A可能为如下:








5.2 相似矩阵
【重点:和对角矩阵相似】
5.2.1 相似的定义

例子



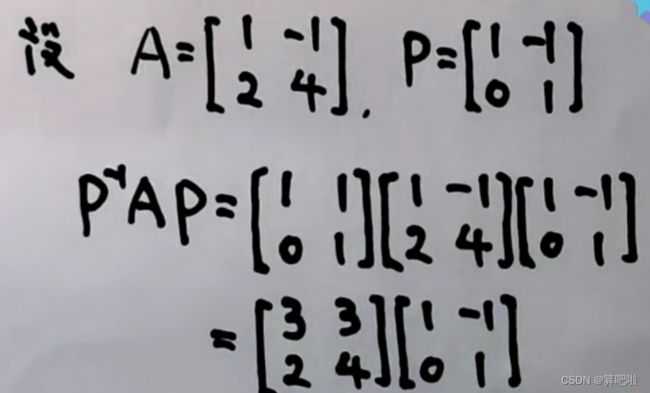
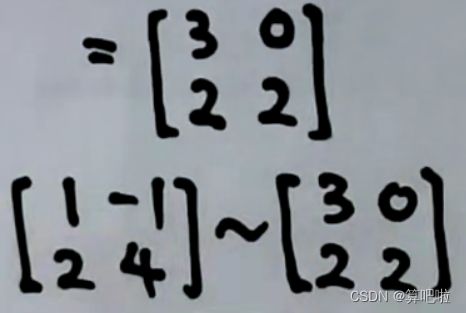
【由以上例题可知,一个矩阵的相似矩阵是不唯一的】
5.2.2 相似的性质

【相似具有传递性:】
【可用于证明题:证两者相似时可以找个中介】
【还有一种考法:求可逆矩阵p】



证明:


利用:如果A是可逆矩阵,则AB的秩等于B的秩 证明


证明:


利用前面的定理:特征值的和是A的迹。而A、B的特征值相同,则其迹相同。


证明:







❀例题



5.2.3 相似对角化

不是每一个矩阵都能相似对角化。

证明:
【充分性】
(把A矩阵暂时看作三阶矩阵),把P矩阵按列分块(对角矩阵也是假设的)
【必要性】







(1)可逆矩阵相似对角化解题步骤


❀例题
【❗】
(注意此时由2重特征值)
n-秩=2,则秩=1。








分析:特征值一定有重根





分析:B是对角矩阵,又AB相似,则P矩阵即A的特征向量。(根据相似对角化的解题步骤)
(1)问
【法一】
需用相似的必要条件34构造一元二次方程组【4是最好用的】
【法二】
则-x=1-y -1=-y。对应可解
(2)问
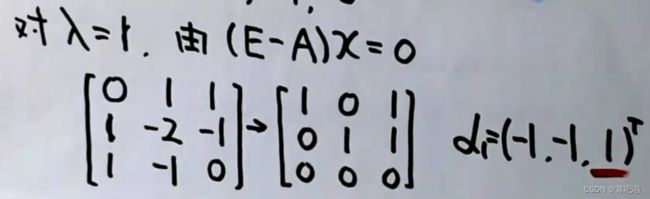
分析:求A的3个特征向量



5.3 实对称矩阵



【证明】
证明正交即内积为0(红框)
由1式转置:
由A是实对称的,即A的转置就是A;再由2式:


(1)正交矩阵相似对角化解题步骤


【分为如下情况】

特征值不同,根据定理,此时已经正交。

即检查两向量是否垂直(垂直即表示已正交)
判定垂直:两向量的内积为0

如不垂直,即不正交

❀例题




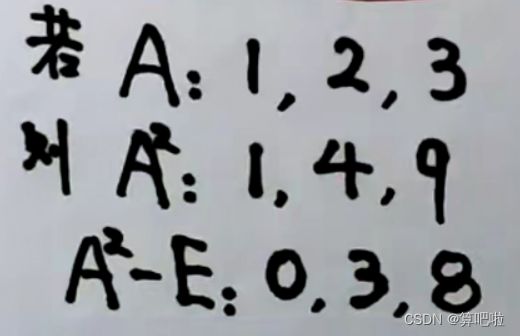
【❗ 】
去掉或:运用定理1【实对称矩阵一定和对角矩阵相似】
保证对角矩阵减去单位矩阵 秩为2(即减后里面只有1个0):
(0和1的位置可以变化的)
又由于对角矩阵 其各项就是特征值,则:






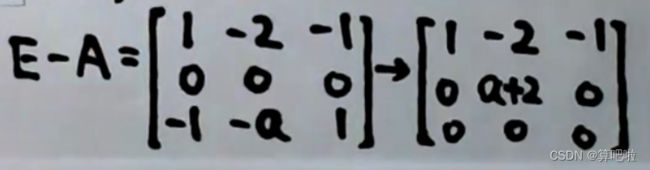
分析:根据秩的背景处理参数a








分析:通过研究A和那个对角矩阵相似。并以此当中间变量 求取最后结果。







*第六章 二次型


6.1 概念、定理
6.1.1 二次型
二次型:一个多元函数的每一项都是2次的。


- 中间矩阵是对称矩阵; (其主对角线是平方项系数;混合项系数:x1x2的系数倍2除摆在a12和a21的位置,x2x3的系数倍2除摆在a23a32的位置,x1x3的系数为0则摆在a13a31的位置)
【可写成3个矩阵的原因】原理:
右边的矩阵也类似与 矩阵乘法的相加,因此拆分开
又A是对称矩阵
【二次型和实对称矩阵是一 一对应的关系】



6.1.2 标准形
标准形:只有平方项,没有混合项

【对角矩阵和标准型一一对应】
6.1.3 规范形
规范形:必须是标准形,且平方项系数只能是+1、-1、0

6.1.4 正惯性指数、负惯性指数
正惯性指数:标准形中 正平方项的个数;
负惯性指数:标准形中 负平方项的个数。

【可用配方法、特征值来求得正负惯性指数】
6.1.5 二次型的秩
6.1.6 坐标变换
坐标变换的3种表现形式:


【坐标变换有无数多组】
【需要抓住重点:|C|=0、C可逆】

其中C是坐标变换中的可逆矩阵
B的转置=B意味着B是对称矩阵,即为新的二次型表示,B记为新的二次型矩阵


6.1.7 合同

这两矩阵肯定不相似(迹不同)


【合同的性质】


证明:

(判断两个矩阵是否合同):(即抓住正负惯性指数)

证明-利用定理:二次型经过坐标变换,其正负惯性指数不会变。
(1)是最好的方法
接下来介绍其他方法
(2)
如果假设合同,两边算行列式
C可逆,|C|不为0。|C|平方>0,则|A|、|B|正负号相同



6.2 化成标准形

证明:
(把Q矩阵当作 坐标变换里的C矩阵)
正交矩阵,其逆等于其转置矩阵
(对角矩阵的各项就是标准形平方项的系数,又对角矩阵就是A的特征值)->因此标准形以特征值作为平方项的系数:



❀例题
分析:给了标准形相当于给了特征值。注意三个自变量,因此特征值应该是1、4、0。
看到二次型,可写出矩阵A
0是A的特征值,意味着行列式A的值=0
P是特征向量,第一列是1的特征向量,第二列是4的特征向量,第三列是0的特征向量(对应特征值的特征向量)
注意正交矩阵的几何意义:列向量一定是两两垂直的,列向量是单位向量。因此要单位化






注意特征值都不同,因此对应的特征向量已相互正交





分析:先处理x1
处理中括号-让中括弧完全平方
中括号是完全平方了,然后打开后面的平方项,进行合并同类项
开始处理x2(同x1),整理x3
(上三角)







分析:对于没有平方项的,可以先做一次准备工作–做一次坐标变换构造出平方项。【一般习惯用a+b、a-b的形式】。为了保证坐标变换行列式不等于0,因此令x3=y3
然后带入原式,构造出平方项
开始配方
注意:经过了两次坐标变换。






把以下标准形变成规范形

【可用配方法、特征值来求得正负惯性指数】





6.3 正定二次型

【平方项系数有负的,一定不是正定二次型】







❀例题









(特征值)
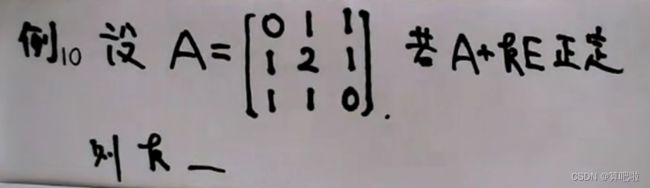


p=2,q=1。选b


