【管理运筹学】第 8 章 | 动态规划(2,动态规划的基本思想)
文章目录
- 引言
-
- 2.2 动态规划的基本思想
- 写在最后
引言
承接前文,介绍完基本概念后,我们来学习动态规划的基本思想,用上一篇文章的最短路问题来配合说明。
2.2 动态规划的基本思想
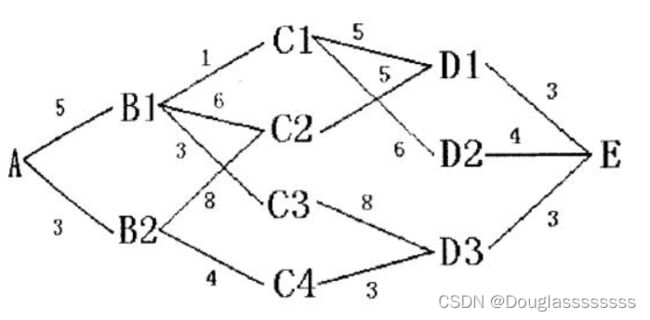
最短路问题中的网络如下图所示,从 A 到 E 可以分成 4 段,第一段从 A 到 B ,有两条路,如果选择去 B2 作为此阶段的决策,则下一阶段的起点就是 B2 ,此时又有两种选择,以此类推,可以求出一个决策序列。每一段选择不同,得到的序列便不同,我们希望求出一个最优决策,此决策对应的路线为 A 到 E 的最短路线。
显然,通过求出所有路线的距离进行比较,找出最短路对于本例是可行的,但是当路径数增加,这种穷举法的计算量会大大增加。下面介绍动态规划方法,可以帮助我们更好地求解该问题。
动态规划方法基于贝尔曼(R. Bellman)等人提出的最优化原理,这个最优化原理指出:一个过程的最优策略具有这样的性质,即无论初始状态或初始决策如何,对于先前决策所形成的状态而言,其以后的所有决策须构成最优策略。
将该原理应用到最短路问题中,即从 A 到 E 的最短路线若经过 s k s_k sk 点,则此路线由 s k s_k sk 点到 E 的部分,必是由 s k s_k sk 点到 E 点的最短路线。
如此,我们便可以从最后一个状态,即 s 4 s_4 s4 开始,向最初状态不断递推求解,最终得到从 A 到 E 的最短路线。
第一步: k = 4 k=4 k=4 ,此时状态变量集合为 S 4 = { D 1 , D 2 , D 3 } S_4=\{D1,D2,D3\} S4={D1,D2,D3} ,那么每个取值对应的指标函数分别为 f 4 ( D 1 ) = 3 , f 4 ( D 2 ) = 4 , f 4 ( D 3 ) = 3 f_4(D1)=3,f_4(D2)=4,f_4(D3)=3 f4(D1)=3,f4(D2)=4,f4(D3)=3 。
第二步: k = 3 k=3 k=3 ,此时状态变量可取值为 S 3 = { C 1 , C 2 , C 3 , C 4 } S_3=\{C1,C2,C3,C4\} S3={C1,C2,C3,C4} ,如果取 C 1 C1 C1 ,则其到终点有两条路线,需加以比较,有 f 3 ( C 1 ) = m i n { d ( C 1 , D 1 ) + f 4 ( D 1 ) d ( C 1 , D 2 ) + f 4 ( D 2 ) } = m i n { 5 + 3 6 + 4 } = 8 f_3(C1)=min\begin{Bmatrix} d(C1,D1)+f_4(D1) \\ d(C1,D2)+f_4(D2)\end{Bmatrix}=min\begin{Bmatrix} 5+3 \\ 6+4\end{Bmatrix}=8 f3(C1)=min{d(C1,D1)+f4(D1)d(C1,D2)+f4(D2)}=min{5+36+4}=8 说明从 C1 到 E 最短距离为 8 ,路径为 C 1 → D 1 → E C1\to D1 \to E C1→D1→E ,此阶段决策为 u 3 ∗ ( C 1 ) = D 1 u^*_3(C_1)=D1 u3∗(C1)=D1 。
若取 C 2 C2 C2 ,只有一条路径,即 C 2 → D 1 → E C_2\to D1\to E C2→D1→E ,则 f 3 ( C 2 ) = d ( C 2 , D 1 ) + f 4 ( D 1 ) = 8 f_3(C2)=d(C2,D1)+f_4(D1)=8 f3(C2)=d(C2,D1)+f4(D1)=8 ,相应决策为 u 3 ∗ ( C 2 ) = D 1 u^*_3(C2)=D1 u3∗(C2)=D1 。同理,可求出 f 3 ( C 3 ) = d ( C 3 , D 3 ) + f 4 ( D 3 ) = 11 , u 3 ∗ ( C 3 ) = D 3 f_3(C3)=d(C3,D3)+f_4(D3)=11,u^*_3(C3)=D3 f3(C3)=d(C3,D3)+f4(D3)=11,u3∗(C3)=D3 f 3 ( C 4 ) = d ( C 3 , D 3 ) + f 4 ( D 3 ) = 6 , u 3 ∗ ( C 4 ) = D 3 f_3(C4)=d(C3,D3)+f_4(D3)=6,u^*_3(C4)=D3 f3(C4)=d(C3,D3)+f4(D3)=6,u3∗(C4)=D3 第三步: k = 2 k=2 k=2 ,此时状态变量集合 S 2 = { B 1 , B 2 } S_2=\{B1,B2\} S2={B1,B2} ,有 f 2 ( B 1 ) = m i n { d ( B 1 , C 1 ) + f 3 ( C 1 ) d ( B 1 , C 2 ) + f 3 ( C 2 ) d ( B 1 , C 3 ) + f 3 ( C 3 ) } = m i n { 1 + 8 6 + 8 3 + 11 } = 9 , u 2 ∗ ( B 1 ) = C 1 f_2(B1)=min\begin{Bmatrix} d(B1,C1)+f_3(C1) \\ d(B1,C2)+f_3(C2) \\ d(B1,C3)+f_3(C3) \end{Bmatrix}=min\begin{Bmatrix} 1+8 \\ 6+8 \\ 3+11 \end{Bmatrix}=9,u^*_2(B1)=C1 f2(B1)=min⎩ ⎨ ⎧d(B1,C1)+f3(C1)d(B1,C2)+f3(C2)d(B1,C3)+f3(C3)⎭ ⎬ ⎫=min⎩ ⎨ ⎧1+86+83+11⎭ ⎬ ⎫=9,u2∗(B1)=C1 f 2 ( B 2 ) = m i n { d ( B 2 , C 2 ) + f 3 ( C 2 ) d ( B 2 , C 4 ) + f 3 ( C 4 ) } = m i n { 8 + 8 4 + 6 } = 10 , u 2 ∗ ( B 2 ) = C 4 f_2(B_2)=min\begin{Bmatrix} d(B2,C2)+f_3(C2) \\ d(B2,C4)+f_3(C4)\end{Bmatrix}=min\begin{Bmatrix} 8+8 \\ 4+6\end{Bmatrix}=10,u^*_2(B_2)=C4 f2(B2)=min{d(B2,C2)+f3(C2)d(B2,C4)+f3(C4)}=min{8+84+6}=10,u2∗(B2)=C4 第四步: k = 1 k=1 k=1 ,此时只有一个状态 A ,有 f 1 ( A ) = m i n { d ( A , B 1 ) + f 2 ( B 1 ) d ( A , B 2 ) + f 2 ( B 2 ) } = m i n { 5 + 9 3 + 10 } = 13 , u 1 ∗ ( A ) = B 2 f_1(A)=min\begin{Bmatrix} d(A,B1)+f_2(B1) \\ d(A,B2)+f_2(B2)\end{Bmatrix}=min\begin{Bmatrix} 5+9 \\ 3+10 \end{Bmatrix}=13,u^*_1(A)=B2 f1(A)=min{d(A,B1)+f2(B1)d(A,B2)+f2(B2)}=min{5+93+10}=13,u1∗(A)=B2 即 A 到 E 的最短距离为 13 ,按照计算顺序反推可得到最优决策序列 { u k ∗ } \{u^*_k\} {uk∗} ,为 u 1 ∗ ( A ) = B 2 , u 2 ∗ ( B 2 ) = C 4 , u 3 ∗ ( C 4 ) = D 3 , u 4 ∗ ( D 3 ) = E u^*_1(A)=B2,u^*_2(B_2)=C4,u^*_3(C4)=D3,u^*_4(D3)=E u1∗(A)=B2,u2∗(B2)=C4,u3∗(C4)=D3,u4∗(D3)=E ,则最优路线为 A → B 2 → C 4 → D 3 → E A\to B2 \to C4 \to D3 \to E A→B2→C4→D3→E 从上述求解过程中可以看出,第 k k k 阶段和第 k + 1 k+1 k+1 段都利用了如下关系 { f k ( s k ) = m i n { d k ( s k , u k ) + f k + 1 ( s k + 1 ) } , k = 4 , 3 , 2 , 1 ( 1.1 ) f 5 ( s 5 ) = 0 ( 1.2 ) \begin{cases} \ f_k(s_k)=min\{d_k(s_k,u_k)+f_{k+1}(s_{k+1})\}, & k=4,3,2,1(1.1)\\ \ f_5(s_5)=0 (1.2) \end{cases} { fk(sk)=min{dk(sk,uk)+fk+1(sk+1)}, f5(s5)=0(1.2)k=4,3,2,1(1.1) 注:状态转移方程为 s k + 1 = u k s_{k+1}=u_k sk+1=uk 。
这种递推关系称为动态规划的基本方程,式(1.2)为边界条件。
因此,可总结出动态规划方法的基本思想总结为:
- 将多阶段问题决策过程划分阶段,恰当地选取状态变量、决策变量及定义最优指标函数,从而把问题化为一族同类型的子问题,然后逐个求解。
- 求解时从最后一个阶段开始,逆方向进行,逐段递推寻优。在每个子问题求解时,都要使用它前面已经求出的子问题的最优结果,最后一个子问题的最优解就是整个问题的最优解。
- 动态规划方法是既把当前一段与未来各段分开,又把当前效益和未来效益结合起来考虑的一种最优化方法,因此每段的决策选取都是从全局考虑的,与该段的最优选择一般不同。
写在最后
通过分阶段求解最短路问题,动态规划的思想已经很好地体现了,下一篇文章我们来看看动态规划的数学模型及其求解。