ROS运行ORB-SLAM2,D435i深度摄像头运行ORB-SLAM2,ROS编译的Syntax check of ORB_SLAM2/manifest.xml failed解决
一.运行ROS版的ORB-SLAM2
1. 将Examples/ROS/ORB_SLAM2路径添加到ROS_PACKAGE_PATH环境变量中。打开 .bashrc 文件并在末尾添加以下行。将 PATH 替换为克隆 ORB_SLAM2 的文件夹:
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:PATH/ORB_SLAM2/Examples/ROS
# 我的是下面这个路径:
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/cgm/ORB_SLAM2/Examples/ROS
2. 执行 build_ros.sh 脚本:
chmod +x build_ros.sh
./build_ros.sh
3. 报错Error from syntax check of ORB_SLAM2/manifest.xml
build.sh正常编译,但build_ros.sh编译不通过,报错如下:
[rosbuild] Building package ORB_SLAM2
[rosbuild] Error from syntax check of ORB_SLAM2/manifest.xml
Traceback (most recent call last):
File "" , line 1, in <module>
File "/opt/ros/noetic/lib/python3/dist-packages/roslib/__init__.py", line 50, in <module>
from roslib.launcher import load_manifest # noqa: F401
File "/opt/ros/noetic/lib/python3/dist-packages/roslib/launcher.py", line 42, in <module>
import rospkg
ImportError: No module named rospkg
CMake Error at /opt/ros/noetic/share/ros/core/rosbuild/private.cmake:77 (message):
[rosbuild] Syntax check of ORB_SLAM2/manifest.xml failed; aborting
Call Stack (most recent call first):
/opt/ros/noetic/share/ros/core/rosbuild/public.cmake:174 (_rosbuild_check_manifest)
CMakeLists.txt:4 (rosbuild_init)
-- Configuring incomplete, errors occurred!
See also "/home/cgm/ORB_SLAM2/Examples/ROS/ORB_SLAM2/build/CMakeFiles/CMakeOutput.log".
make: *** 没有指明目标并且找不到 makefile。 停止。
参考博客1
参考博客2
解决办法:
python版本原因,核心思想是让系统变量python指向python3而不是原来的python2;使用修改软连接的方式,让“python”指向python3;
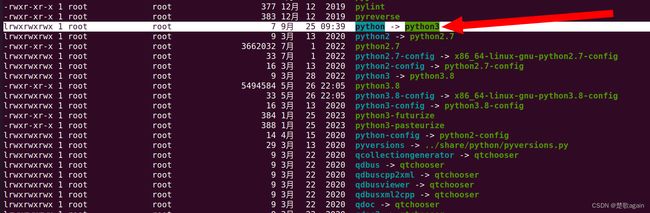
在/usr/bin目录下ls -l 查看python软连接文件,发现python->python2

先删除python->python2软连接。再创建python3软连接
// 删除软连接
sudo rm -r link python
// 重新创建软连接
sudo ln -s python3 /usr/bin/python

最后检查python的软连接已经指向python3
lrwxrwxrwx 1 root root 7 9月 25 09:39 python -> python3
这是一个符号链接(也称为软链接)的长格式列表输出。
-
lrwxrwxrwx: 这是文件的权限字符串。l: 表示这是一个链接。rwxrwxrwx: 这是权限部分,其中每三个字符代表一个权限组。第一组rwx是所有者的权限,第二组rwx是组的权限,第三组rwx是其他用户的权限。在这里,每组都有rwx权限,表示读(r)、写(w)和执行(x)权限。
-
1: 这是文件的硬链接数。对于符号链接,这通常是1。 -
root: 这是文件的所有者。在这种情况下,文件的所有者是root用户。 -
root: 这是文件的组。在这种情况下,文件所属的组也是root。 -
7: 这是文件的大小,以字节为单位。对于符号链接,这通常是链接目标的字符数。 -
9月 25 09:39: 这是文件的最后修改时间。 -
python: 这是文件(或链接)的名称。 -
->: 这表示它是一个符号链接,后面跟着的是链接的目标。 -
python3: 这是符号链接的目标。这意味着当您尝试运行或访问python时,您实际上是在运行或访问python3。
总之,这意味着在您的系统上,当您键入python并尝试执行它时,您实际上是在执行python3。这是通过创建一个指向python3的符号链接来实现的。
改之前,要使用python3

改之后,使用python就是python3

4.再次运行 ./build_ros.sh,错误:usleep在/home/cgm/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src/AR/ViewerAR.cc中没有声明。
/home/cgm/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src/AR/ViewerAR.cc:233:9: error: ‘usleep’ was not declared in this scope
233 | usleep(mT*1000);
- 打开
/home/cgm/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src/AR/ViewerAR.cc文件。 - 在文件的顶部,添加
#include。 - 保存文件并重新尝试编译。
5. 报错
[ 77%] Linking CXX executable ../MonoAR
/usr/bin/ld: warning: libopencv_imgproc.so.4.2, needed by /opt/ros/noetic/lib/libcv_bridge.so, may conflict with libopencv_imgproc.so.3.4
/usr/bin/ld: CMakeFiles/MonoAR.dir/src/AR/ViewerAR.cc.o: undefined reference to symbol '_ZN2cv7putTextERKNS_17_InputOutputArrayERKNSt7__cxx1112basic_stringIcSt11char_traitsIcESaIcEEENS_6Point_IiEEidNS_7Scalar_IdEEiib'
/usr/bin/ld: /usr/lib/x86_64-linux-gnu/libopencv_imgproc.so.4.2.0: error adding symbols: DSO missing from command line
collect2: error: ld returned 1 exit status
make[2]: *** [CMakeFiles/MonoAR.dir/build.make:278:../MonoAR] 错误 1
make[1]: *** [CMakeFiles/Makefile2:541:CMakeFiles/MonoAR.dir/all] 错误 2
make: *** [Makefile:130:all] 错误 2
这些错误指出了一个主要问题:您的系统上安装了多个版本的OpenCV库,并且在链接时发生了冲突。
解决:在/home/cgm/ORB_SLAM2/Examples/ROS/ORB_SLAM2/CMakeLists.txt中的
#这句
find_package(OpenCV 3.0 QUIET)
#改为下面两句
SET(OpenCV_DIR /usr/local/lib/cmake/opencv4/) # 设置OpenCV_DIR
find_package(OpenCV QUIET)
#我的是报错了,你们的不一定会报错
其他人的解决办法ROS-noetic中OpenCV4和ORB_SLAM2中OpenCV3不匹配的问题
编译成功
Build type: Release
-- Using flag -std=c++11.
-- Configuring done
-- Generating done
-- Build files have been written to: /home/cgm/ORB_SLAM2/Examples/ROS/ORB_SLAM2/build
[ 0%] Built target rospack_genmsg_libexe
[ 0%] Built target rosbuild_precompile
[ 88%] Built target Mono
[ 88%] Built target RGBD
[100%] Built target Stereo
[100%] Built target MonoAR
二.Running RGB_D Node 运行 RGB_D 节点
对于来自话题 /camera/rgb/image_raw 和 /camera/depth_registered/image_raw 的 RGB-D 输入,运行节点 ORB_SLAM2/RGBD。您将需要提供词汇表文件和设置文件。
rosrun ORB_SLAM2 RGBD PATH_TO_VOCABULARY(词典路径) PATH_TO_SETTINGS_FILE(设置路径,默认的是Asus.yaml)
下载https://cvg.cit.tum.de/rgbd/dataset/freiburg3/rgbd_dataset_freiburg3_walking_xyz.bag
ORB SLAM2默认订阅的RGB-D图像主题( /camera/rgb/image_raw 和 /camera/depth_registered/image_raw )可能与你的bag文件中的主题不匹配。你可以使用以下命令查看bag文件中的主题:
cgm@cgm:~/下载$ rosbag info rgbd_dataset_freiburg3_walking_xyz.bag
path: rgbd_dataset_freiburg3_walking_xyz.bag
version: 2.0
duration: 29.1s
start: Jul 09 2012 23:05:13.48 (1341846313.48)
end: Jul 09 2012 23:05:42.54 (1341846342.54)
size: 551.8 MB
messages: 10341
compression: bz2 [1693/1693 chunks; 31.75%]
uncompressed: 1.7 GB @ 59.7 MB/s
compressed: 551.1 MB @ 19.0 MB/s (31.75%)
types: sensor_msgs/CameraInfo [c9a58c1b0b154e0e6da7578cb991d214]
sensor_msgs/Image [060021388200f6f0f447d0fcd9c64743]
tf/tfMessage [94810edda583a504dfda3829e70d7eec]
visualization_msgs/MarkerArray [90da67007c26525f655c1c269094e39f]
topics: /camera/depth/camera_info 834 msgs : sensor_msgs/CameraInfo
/camera/depth/image 833 msgs : sensor_msgs/Image
/camera/rgb/camera_info 859 msgs : sensor_msgs/CameraInfo
/camera/rgb/image_color 859 msgs : sensor_msgs/Image
/cortex_marker_array 2900 msgs : visualization_msgs/MarkerArray
/tf 4056 msgs : tf/tfMessage
我们可以看到以下信息:
- bag文件中的RGB图像主题是
/camera/rgb/image_color,而深度图像主题是/camera/depth/image。 - 在
ros_rgbd.cc代码中,ORB SLAM2订阅的RGB图像主题是/camera/rgb/image_raw,深度图像主题是/camera/depth_registered/image_raw。
这里的主题名称不匹配,所以直接运行 cgm@cgm:~/ORB_SLAM2$ rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt /home/cgm/ORB_SLAM2/Examples/ROS/ORB_SLAM2/Asus.yamlORB 和 cgm@cgm:~/下载$ rosbag play rgbd_dataset_freiburg3_walking_xyz.bag 是没有接收到图像数据,就像这样:

为了解决这个问题,你需要修改ros_rgbd.cc中的主题名称,使其与bag文件中的主题名称匹配。具体修改如下:
将:
message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/rgb/image_raw", 1);
message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "camera/depth_registered/image_raw", 1);
修改为:
message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/rgb/image_color", 1);
message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "/camera/depth/image", 1);
完成上述修改后,重新编译ORB SLAM2的ROS节点,并再次运行。然后,当你播放bag文件时,ORB SLAM2应该能够接收到图像数据并开始处理。
确保在运行ORB SLAM2节点之前先启动roscore,然后再在另一个终端中播放bag文件。
会有点卡顿
三.D435i深度摄像头运行ORB-SLAM2
1.修改一个文件
修改ORB_SLAM2/Examples/ROS/ORB_SLAM2/src/ros_rgbd.cc文件
// D435i 的 topic 是 /camera/color/image_raw 和 /camera/depth/image_rect_raw
message_filters::Subscriber<sensor_msgs::Image> rgb_sub(nh, "/camera/color/image_raw", 1);
message_filters::Subscriber<sensor_msgs::Image> depth_sub(nh, "/camera/depth/image_rect_raw", 1);
2.重新编译 ./build_ros.sh
./build_ros.sh
3.查看相机内参
打开一个终端输入
roslaunch realsense2_camera rs_camera.launch
再打开一个终端输入
rostopic echo /camera/color/camera_info
查看到的相机内参如下:
stamp:
secs: 1695614698
nsecs: 941847086
frame_id: "camera_color_optical_frame"
height: 720
width: 1280
distortion_model: "plumb_bob"
D: [0.0, 0.0, 0.0, 0.0, 0.0]
K: [909.855712890625, 0.0, 651.5874633789062, 0.0, 909.7683715820312, 381.3797302246094, 0.0, 0.0, 1.0]
R: [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P: [909.855712890625, 0.0, 651.5874633789062, 0.0, 0.0, 909.7683715820312, 381.3797302246094, 0.0, 0.0, 0.0, 1.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
---
4.相机内参矩阵 ( K )
相机的内参矩阵通常表示为:
K = [ f x 0 c x 0 f y c y 0 0 1 ] K = \begin{bmatrix} fx & 0 & cx \\ 0 & fy & cy \\ 0 & 0 & 1 \\ \end{bmatrix} K= fx000fy0cxcy1
其中:
- ( fx ) 和 ( fy ):相机的焦距,分别在图像的 x 和 y 方向上。这些值决定了图像上的点如何映射到相机坐标系中。
- ( cx ) 和 ( cy ):图像的主点坐标。主点是3D世界中的点投影到图像平面上的点。
从提供的 K 矩阵中,我们得到:
- ( fx = 910.0997314453125 )
- ( fy = 909.994873046875 )
- ( cx = 639.4933471679688 )
- ( cy = 359.3774108886719 )
5.创建配置文件
切换到ORB_SLAM2/Examples/ROS/ORB_SLAM2目录下
打开终端输入
cd ORB_SLAM2/Examples/ROS/ORB_SLAM2
新建MyD435i.yaml文件
在终端里输入
touch MyD435i.yaml
%YAML:1.0
#--------------------------------------------------------------------------------------------
# Camera Parameters. Adjust them!
#--------------------------------------------------------------------------------------------
# Camera calibration and distortion parameters (OpenCV)
# rostopic echo /camera/color/camera_info中查看的是 K: [909.855712890625, 0.0, 651.5874633789062, 0.0, 909.7683715820312, 381.3797302246094, 0.0, 0.0, 1.0]
# 改为自己的相机的内参矩阵K
Camera.fx: 909.855712890625
Camera.fy: 909.7683715820312
Camera.cx: 651.5874633789062
Camera.cy: 381.3797302246094
Camera.k1: 0.0
Camera.k2: 0.0
Camera.p1: 0.0
Camera.p2: 0.0
Camera.p3: 0.0
Camera.width: 640
Camera.height: 480
# Camera frames per second
Camera.fps: 30.0
# IR projector baseline times fx (aprox.)
# bf = baseline (in meters) * fx, D435i的 baseline = 50 mm
Camera.bf: 50.0
# Color order of the images (0: BGR, 1: RGB. It is ignored if images are grayscale)
Camera.RGB: 1
# Close/Far threshold. Baseline times.
ThDepth: 40.0
# Deptmap values factor
DepthMapFactor: 1000.0
#--------------------------------------------------------------------------------------------
# ORB Parameters
#--------------------------------------------------------------------------------------------
# ORB Extractor: Number of features per image
ORBextractor.nFeatures: 1000
# ORB Extractor: Scale factor between levels in the scale pyramid
ORBextractor.scaleFactor: 1.2
# ORB Extractor: Number of levels in the scale pyramid
ORBextractor.nLevels: 8
# ORB Extractor: Fast threshold
# Image is divided in a grid. At each cell FAST are extracted imposing a minimum response.
# Firstly we impose iniThFAST. If no corners are detected we impose a lower value minThFAST
# You can lower these values if your images have low contrast
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
#--------------------------------------------------------------------------------------------
# Viewer Parameters
#--------------------------------------------------------------------------------------------
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1
Viewer.GraphLineWidth: 0.9
Viewer.PointSize:2
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3
Viewer.ViewpointX: 0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
Viewer.ViewpointF: 500
PointCloudMapping.Resolution: 0.01
meank: 50
thresh: 2.0
6.运行
roslaunch realsense2_camera rs_camera.launch
在ORB_SLAM2文件夹下再打开一个终端输入
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/MyD435i.yaml
即可运行成功