ros2学习笔记-CLI工具,记录命令对应操作。
目录
- 环境变量
- turtlesim和rqt
-
- 以初始状态打开rqt
- node
-
- 启动节点
- 查看节点列表
- 查看节点更多信息
- 命令行参数 --ros-args
- topic
-
- 话题列表
- 话题类型
- 话题列表,附加话题类型
- 根据类型查找话题名
- 查看话题发布的数据
- 查看话题的详细信息
- 查看类型的详细信息
- 给话题发布消息(在命令行)
- 带有时间戳的消息
- 查看话题发布的频率Hz
- service
-
- 服务列表
- 服务类型
- 服务列表,附加服务类型
- 根据类型查找服务名
- 服务类型结构
- 调用服务
- parameters
-
- 参数列表
- 获取参数值
- 设置参数值
- 获取节点所有参数
- 为节点加载参数
- 启动时指定节点参数
- action
-
- 通信方式
- 动作列表
- 动作列表,附加类型
- 动作更多信息
- 动作类型结构
- 发送动作目标
- 发送动作目标,要求有稳定的反馈
- topic,service,action的区别
- 使用 rqt_console 查看特定日志消息
-
- 启动
- 过滤某些级别的消息
- 启动节点(Launching nodes)
- 记录和播放数据
-
- 记录单个topic
- 记录多个topic
- 查看记录信息
- 记录回放
环境变量
启动前要检查环境变量:ROS_DOMAIN_ID 和 ROS_LOCALHOST_ONLY。如果通信时PIN不同,应该首先考虑是不是环境变量设置错误。 Configuring environment
记得source一下ros2。
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
turtlesim和rqt
Turtlesim 是一款用于学习 ROS2 的轻量级模拟器。 它说明了 ROS 2 在最基本的层面上做了什么,让您了解以后将如何处理真实机器人或机器人模拟。
ros2 工具是用户管理、内省和与 ROS 系统交互的方式。 它支持针对系统及其操作的不同方面的多个命令。 人们可能会使用它来启动节点、设置参数、收听话题等等。 ros2工具是核心 ROS2 安装的一部分。
rqt 是 ROS2 的图形用户界面 (GUI)工具。 在 rqt 中完成的所有操作都可以在命令行上完成,但 rqt 提供了一种更用户友好的方式来操作 ROS2 元素。
以初始状态打开rqt
rqt每次启动都会以上次关闭时的状态打开,如果rqt界面出现了什么异常卡顿(比如某个页面无法点击,或者无法滑动),可以通过下面命令像第一次打开rqt一样。
rqt --clear-config
node
启动节点
ros2 run <package_name> <executable_name>
查看节点列表
ros2 node list
查看节点更多信息
可以看到节点的话题信息(subscribers and publishers),服务信息(services), 动作信息(action servers and action clients)。
ros2 node info > "一般是/node_name"
命令行参数 --ros-args
ROS的命令行参数
--remap
ros2 run some_package some_ros_executable --ros-args --remap foo:=bar
ros2 run some_package some_ros_executable --ros-args -r foo:=bar
ros2 run some_package some_ros_executable --ros-args -r some_node:foo:=bar
--param
ros2 run some_package some_ros_executable --ros-args --param string_param:=test
ros2 run some_package some_ros_executable --ros-args -p string_param:=test
ros2 run some_package some_ros_executable --ros-args -p some_node:string_param:=test
--params-file
ros2 run some_package some_ros_executable --ros-args --params-file params_file.yaml
node0_name:
ros__parameters:
param0_name: param0_value
...
paramN_name: paramN_value
...
nodeM_name:
ros__parameters:
...
* 匹配由斜线划分的单个令牌。** 匹配由斜线划分的零或更多令牌。不允许部分匹配(例如foo*)。
例如:
/**:
ros__parameters:
string_param: foo
将在所有节点上设置参数string_param.
/**/some_node:
ros__parameters:
string_param: foo
将在任何名称空间中的some_node上设置parameter string_param.
/foo/*:
ros__parameters:
string_param: foo
将在名称空间 /foo下的任何节点上设置参数string_param(例如只匹配到foo/foo1 而不会匹配到foo/foo1/foo11).
topic
话题可以理解为是ROS中节点交换消息的总线。
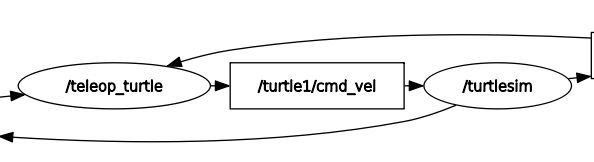
在图中查看节点和话题之间的结构:
rqt_graph
圆的是节点,方的是话题。
话题列表
ros2 topic list
话题类型
ros2 topic type <topic_name>
话题列表,附加话题类型
类型其实就是消息结构(消息属于哪个类)。
ros2 topic list -t
根据类型查找话题名
ros2 topic find <type_name>
查看话题发布的数据
ros2 topic echo <topic_name>
注意:数据只有在发布时终端才可以看到。
此命令会发布一个新话题,话题名字类似于/_ros2cli_26646,在rqt_graph中取消选中Debug即可看见。
查看话题的详细信息
可以查看话题的消息类型,以及其被多少个节点发布消息和被多少个节点订阅。
ros2 topic info <topic_name>
查看类型的详细信息
这里的类型不只是话题的类型可以被查看,其他类型也可以使用此方法看到具体的结构信息。
ros2 interface show <msg type>
查看所有类型的列表
ros2 interface list
以ros2 interface show geometry_msgs/msg/Twist为例,显示的类型如下:
# This expresses velocity in free space broken into its linear and angular parts.
Vector3 linear
float64 x
float64 y
float64 z
Vector3 angular
float64 x
float64 y
float64 z
其中,linear和angular可以理解为一个变量,Vector3 是变量的类型,x,y,z是linear/angular的成员,也是变量。
给话题发布消息(在命令行)
'参数需要以yaml语法作为输入。
ros2 topic pub <topic_name> <msg_type> ''
'使用单引号和双引号是等价的,都可以使用。
例如:ros2 topic pub --once /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"(格式和echo显示的结果是一样的)
--once是一个可选的参数,意为“发布一条消息然后退出”。--rate 1:以1Hz的频率持续发布消息(为默认参数设置)。是yaml格式的,每一个冒号后面的空格都不可以省略。
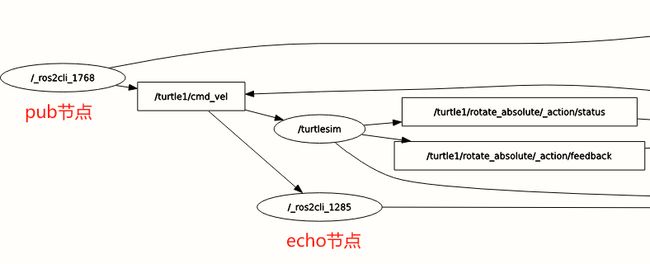
在rqt-graph中显示如下:
带有时间戳的消息
如果消息的header为完整的标题类型std_msgs/msg/Header(有没有可以通过interface show 查看),设置为auto会自动填充为当前时间。
ros2 topic pub /pose geometry_msgs/msg/PoseStamped '{header: "auto", pose: {position: {x: 1.0, y: 2.0, z: 3.0}}}'
如果消息中的类型为builtin_interfaces/msg/Time,可以设置now
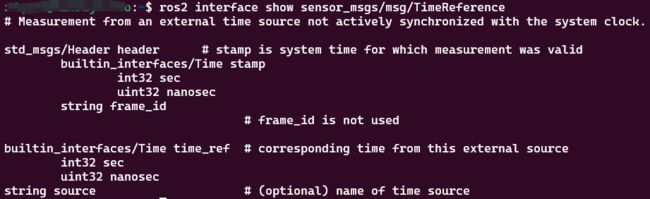
ros2 topic pub /reference sensor_msgs/msg/TimeReference '{header: "auto", time_ref: "now", source: "dumy"}'
sensor_msgs/msg/TimeReference 结构如下:
查看话题发布的频率Hz
ros2 topic hz <topic_name>
service
服务是节点的另一种通信方法,基于呼叫和响应(call-and-response)模型,话题是publisher-subscriber模型。服务只有在客户端专门调用时才提供数据。
服务列表
ros2 service list
服务类型
服务类型的定义与话题类型类似,但是服务类型有两个部分:一条是请求的消息,另一条是响应的消息。
ros2 service type <service_name>
服务列表,附加服务类型
ros2 service list -t
根据类型查找服务名
ros2 service find <type_name>
服务类型结构
查看方法:
ros2 interface show <type_name>
结构:
request structure
---
response structure
---是request structure 和 response structure 的分隔符。
调用服务
ros2 service call <service_name> <service_type> <arguments>
例如:ros2 service call /spawn turtlesim/srv/Spawn "{x: 2, y: 2, theta: 0.2, name: ''}"
会返回:
requester: making request: turtlesim.srv.Spawn_Request(x=2.0, y=2.0, theta=0.2, name='')
response:
turtlesim.srv.Spawn_Response(name='turtle2')
parameters
参数是节点(node)的配置值,每个节点都维护自己的参数,也有共享参数(和C++很像,有私有成员,也有静态成员)。
参数列表
ros2 param list
获取参数值
ros2 param get <node_name> <parameter_name>
设置参数值
ros2 param set <node_name> <parameter_name> <value>
获取节点所有参数
ros2 param dump <node_name>
如果想将参数存入到文件中,可以使用linux中的>运算符:
ros2 param dump /turtlesim > turtlesim.yaml
导出为yaml结构,以后使用时可以直接导入。
为节点加载参数
ros2 param load <node_name> <parameter_file>
例如:ros2 param load /turtlesim turtlesim.yaml
需要注意的是只读的参数只能在启动时进行修改,所以那些参数将不会被修改。
启动时指定节点参数
ros2 run <package_name> <executable_name> --ros-args --params-file <file_name>
例如:ros2 run turtlesim turtlesim_node --ros-args --params-file turtlesim.yaml
这将使得所有参数根据给定的文件更新,具体细节见ROS的命令行参数。
action
action基于topic和service。它的功能类似于service。但是action的特点是:动作不仅可以被取消,还提供了稳定的反馈(service只能返回一个单独的回复response)。
action由三个部分组成:目标,反馈和结果。
操作使用client-server模型,类似于Publisher-Subscriber模型。 “action client”节点将目标发送到“action server”节点,该节点确认目标并返回反馈和结果。
当调用:
ros2 run turtlesim turtle_teleop_key
终端会显示:
Reading from keyboard
---------------------------
Use arrow keys to move the turtle.
Use G|B|V|C|D|E|R|T keys to rotate to absolute orientations. 'F' to cancel a rotation.'Q' to quit.
Use arrow keys to move the turtle.对应topic,
Use G|B|V|C|D|E|R|T keys to rotate to absolute orientations. ‘F’ to cancel a rotation. ‘Q’ to quit.对应action。
每次按下这些按键时,都会将目标发送到/turtlesim节点的action服务器上。一旦乌龟旋转完成,乌龟节点会返回一个信息,比如:[INFO] [turtlesim]: Rotation goal completed successfully ,实际上不同的动作对应不同的反馈信息和结果。
对于动作而言,client可以取消目标(按下F),server也可以取消目标(连续按下D G,server会自动放弃第一个目标,但不是所有的server都是这样处理)。
通信方式
执行ros2 node info /turtlesim可以看到最下方关于action的信息:
Action Servers:
/turtle1/rotate_absolute: turtlesim/action/RotateAbsolute
Action Clients:
这说明/turtlesim节点会接受/turtle1/rotate_absolute提供的目标并且给它提供反馈。
执行ros2 node info /teleop_turtle可以看到最下方关于action的信息:
Action Servers:
Action Clients:
/turtle1/rotate_absolute: turtlesim/action/RotateAbsolute
这说明/teleop_turtle节点会发送目标给/turtle1/rotate_absolute。
动作列表
ros2 action list
动作列表,附加类型
ros2 action list -t
动作更多信息
会返回动作的客户端和服务端节点。
ros2 action info /turtle1/rotate_absolute
动作类型结构
以turtlesim/action/RotateAbsolute类型为例:
ros2 interface show turtlesim/action/RotateAbsolute
返回:
# The desired heading in radians
float32 theta
---
# The angular displacement in radians to the starting position
float32 delta
---
# The remaining rotation in radians
float32 remaining
分成了三部分,其中---是分隔符,第一部分是目标,第二部分是结果,第三部分是反馈信息。
发送动作目标
ros2 action send_goal <action_name> <action_type> ''
例如:ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 1.57}"
发送动作目标,要求有稳定的反馈
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: -1.57}" --feedback
会返回:
Sending goal:
theta: -1.57
Goal accepted with ID: e6092c831f994afda92f0086f220da27
Feedback:
remaining: -3.1268222332000732
Feedback:
remaining: -3.1108222007751465
…
Result:
delta: 3.1200008392333984
Goal finished with status: SUCCEEDED
其中Feedback会持续提供反馈信息,直到目标达到。
topic,service,action的区别
| 通信机制 | 描述 | 使用场景 |
|---|---|---|
| Topic | 一种异步消息队列,分为publisher(发送信息)和subscriber(接受消息) | 处理连续数据流,多对多的形式 |
| Service | 一种同步请求/响应交互模式(发送一次,反馈/响应一次) | 一部分定义请求部分,一部分定义回应部分 |
| Action | 一种异步请求/响应交互模式,带有反馈机制(发送一个目标,执行过程中连续反馈,直到达到目标) | 需要反馈/状态跟踪,需要花费大量时间,可以被中断 |
使用 rqt_console 查看特定日志消息
启动
ros2 run rqt_console rqt_console
过滤某些级别的消息
只查看级别大于等于WARN的日志消息。
ros2 run turtlesim turtlesim_node --ros-args --log-level WARN #大小写都可以
ROS2的日志级别按严重性排序:
Fatal
Error
Warn
Info
Debug
默认级别是Info,因此看不到级别为Debug的消息。
如果设置显示的消息级别是Warn,那么Info和Debug级别的消息都会被显示。
启动节点(Launching nodes)
使用命令行工具一次启动多个节点。
ros2 launch turtlesim multisim.launch.py
这会启动两个turtlesim node,使用ros2 topic list可以看到两个node分别为turtlesim1和turtlesim2:
/parameter_events
/rosout
/turtlesim1/turtle1/cmd_vel
/turtlesim1/turtle1/color_sensor
/turtlesim1/turtle1/pose
/turtlesim2/turtle1/cmd_vel
/turtlesim2/turtle1/color_sensor
/turtlesim2/turtle1/pose
因此我们可以开两个终端来分别控制两个节点:
ros2 topic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 1.8}}"ros2 topic pub /turtlesim2/turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: -1.8}}"
注意:
也可以使用XML和YAML来创建启动文件。 具体细节可以查看Using Python, XML, and YAML for ROS 2 Launch Files
对于launch的更多信息可以查看ROS2 launch tutorials
记录和播放数据
记录有关topic的数据,因此可以随时重播和检查。
记录单个topic
ros2 bag record <topic_name>
例如:ros2 bag record /turtle1/cmd_vel
这会根据时间戳来创建bag文件的名称,想要指定文件名称可以用-o来指定。
记录多个topic
记录多个topic时直接输入多个topic名称,用空格隔开。
ros2 bag record -o subset <topic1_name> <topic2_name>
-o选项允许为bag文件选择一个唯一的名称。这里的subset就是要创建的文件目录名称。
例如:ros2 bag record -o subset /turtle1/cmd_vel /turtle1/pose
查看记录信息
ros2 bag info <bag_file_name>
例如:ros2 bag info subset
记录回放
ros2 bag play <bag_file_name>
有关ros bag更详细的信息在这里找到:https://github.com/ros2/rosbag2。