launch文件基础
在ROS应用中,每个节点通常有许多参数需要设置,为了方便高效操作多个节点,可以编写launch文件,然后用roslaunch命令运行;
启动launch文件命令格式:
•roslaunch: roslaunch [options] [package] [arg_name:=value…]
roslaunch [options] […] [arg_name:=value…]
launch文件的一般格式,参数:
.../>
.../>
.../>
.../>
•参数说明
•要启动的node参数
pkg=''mypackage''
type=''nodetype''
name=''nodename''
arg=''arg1 ....''(可选)
respawn=''ture''(可选)如果节点停止,自动重启节点
ns=''foo''(可选)在foo命名空间启动节点
output=''log|screen''(可选) 操作yaml文件参数 //一次可操作多个参数;
command=''load|dump|delete''(默认load)
file=''$(find pkg-name)/path/foo.yaml''(load或dump命令)yaml文件的名字
param=''param-name''参数名 •<param>定义一个设置在参数服务器的参数,它可以添加到中 //一次只能指定一个标准类型的参数,如 int等
name=''namespace/name''
value=''value''(可选)如果省略这个参数,则应指定一个文件(binfile/textfile)或命令
type=''str|int|double|boot''(可选)指定参数的类型
textfile=''$(find pkg-name)/path/file''(可选)
binfile=''$(find pkg-name)/path/file''()
command=''(find pkg-name)/exe '$(find pkg-name)/arg.txt' ''(可选)exe是可执行文件(cpp、py),arg.txt是参 数文件 •在当前launch文件中调用另一个launch文件
file=''$(find pkg-name)/path/launch-file.launch'' 设置节点的环境变量
name=''environment-variable-name''
value=''environment-variable-value''
<remap>将一个参数名映射为另一个名字
from=''original-name''
to=''new-name''•定义一个局部参数,该参数只能在一个launch文件中使用
''foo''/>声明一个参数foo,后面需要给它赋值
''foo'' default=''1''/>声明一个参数foo,如不赋值取默认值
''foo'' value=''bar''/>声明一常量foo,它的值不能修改 示例:
1. 新建基本launch文件
创建一个包:
& cd beginer_ws/src
& catkin_create_pkg turtlesim_launch roscpp rospy
& cd ..
& catkin_makelaunch :
& cd src
& gedit turtlesim_launch.launch将该程序写入新建的launch文件中。
<launch>
<node pkg="turtle" type="turtle_node" name="turtle_node" respawn="true" output="screen" />
<node pkg="turtlesim" type="turtle_teleop_key" name="turtle_teleop_key" respawn="false" output="screen" />
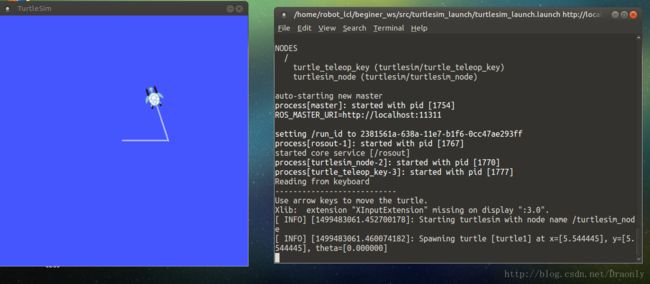
launch>启动launch文件:
roslaunch turtlesim_launch turtlesim_launch.launch即可通过键盘 的上下左右箭头键盘控制小海龟运动:
2. rosparam操作yaml文件参数, 使用示例
现在 文件夹中新建一个 color.yaml文件,并在其中写入下列语句
background_r: 0
background_g: 0
background_b: 0再修改launch文件在其后添加
command="dump" file="$(find turtlesim_launch)/color.yaml" />
添加后如下:
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node" respawn="true" output="screen" />
<node pkg="turtlesim" type="turtle_teleop_key" name="turtle_teleop_key" respawn="false" output="screen" />
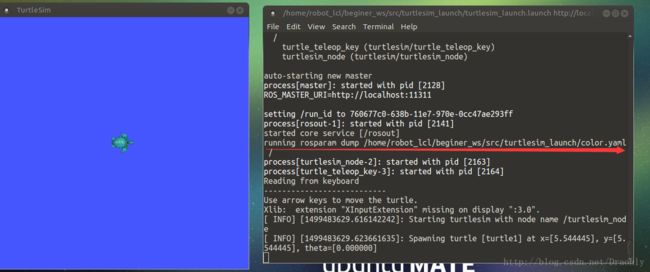
<rosparam command="dump" file="$(find turtlesim_launch)/color.yaml" />
launch>再次启动launch文件,可以发现,程序已经执行了这条语句
3. param 参数使用
在launch中中添加如下语句:
指定参数为 turtle
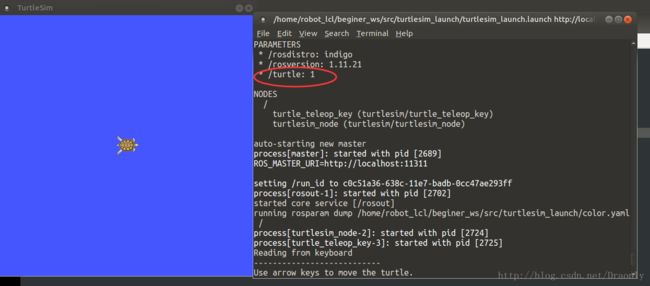
<param name="turtle" value="1" />运行后:
可看到,在参数中出现、turtle:1
也可以在node中写,如放在turtlesim_node 这个node里,调换两个node的语句顺序, 去掉turtlesim_node 语句中 >前的/, 下面添加
<param name="turtle" value="1" />将launch改写如下:
<launch>
<node pkg="turtlesim" type="turtle_teleop_key" name="turtle_teleop_key" respawn="false" output="screen" />
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node" respawn="true" output="screen" >
<param name="turtle" value="1" />
<rosparam command="dump" file="$(find turtlesim_launch)/color.yaml" />
node>
launch>
运行后,可以看到参数中,已是/turtle_teleop_key/turtle:1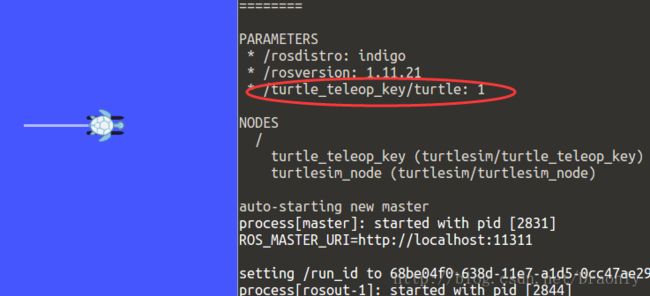
4. include使用示例
格式为:
•在当前launch文件中调用另一个launch文件
file=”$(find pkg-name)/path/launch-file.launch”
将turtlesim_launch中其中一个节点,拿出来单独建立一个teleop.launch文件,如下:
<launch>
<node pkg="turtlesim" type="turtle_teleop_key" name="turtle_teleop_key" respawn="false" output="screen" />
launch>
将turtlesim_launch 改为:
添加include
<launch>
<include file="$(find turtlesim_launch)/teleop.launch" />
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node" respawn="true" output="screen" >
<param name="turtle" value="1" />
<rosparam command="dump" file="$(find turtlesim_launch)/color.yaml" />
node>
launch>
重新启动即可;
5.arg 定义一个局部参数, 使用示例:
格式:
定义一个局部参数,该参数只能在一个launch文件中使用
''foo''/>声明一个参数foo,后面需要给它赋值
''foo'' default=''1''/>声明一个参数foo,如不赋值取默认值
''foo'' value=''bar''/>声明一常量foo,它的值不能修改
定义在节点外:
如:
<launch>
<include file="$(find turtlesim_launch)/teleop.launch" />
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node" respawn="true" output="screen" >
<param name="turtle" value="1" />
<rosparam command="dump" file="$(find turtlesim_launch)/color.yaml" />
node>
<arg name="foo" />
launch>
如不赋值,,则需要在启动launch时赋值:
如:
roslaunch turtlesim_launch turtlesim_launch.launch foo:=2或者,指定常数:
"foo" value="2"/> 则启动时 不需要额外赋值。
注: 其中参考了某ROS课程中的讲解资料。