图形处理(四)基于梯度场的网格编辑-Siggraph 2004
基于梯度场的网格编辑,对应的Paper为《Mesh Editing with Poisson-Based Gradient Field Manipulation》,是Siggraph 2004上的一篇paper,这篇paper与基于拉普拉斯的网格变形方法,统称为基于微分域的网格变形算法,这篇paper其实本质上最后的求解公式和基于拉普拉斯的网格变形方法一样,之所以能够siggraph,是因为它通过泊松梯度场的原理进行推导,算法的巧妙之处在于它以顶点(x,y,z)中的每一维作为一个标量场。
这篇paper涉及到的概念:散度、梯度场、标量场、向量场等看起来很难的东西,说实话,对于这篇paper因为网上找不到源代码,我把这篇paper看了好多遍,才把它的代码写出来。学这篇paper时是我第一次学习向量场的相关知识,向量场在三维算法中非常重要,同时当时给我的感觉也真不是一般的难,我看了好多关于标量场、矢量场的相关知识理论,才感觉慢慢理解。
一、相关理论
数学上的泊松方程:
![]()
其中f表示标量场,w表示梯度场。
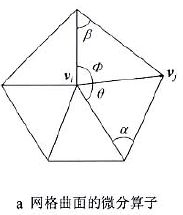
三角网格曲面上的微分算子离散化(引用自《勾画式泊松网格编辑》):
给定定义在网格曲面上的分段线性标量场f(v)=fi*φi(v),其中v为网格曲面上的任意一点;fi为标量场在网格曲面顶点vi处的函数值;φi(*)为分段线性基函数,它在顶点vi处取值为1 ,在其余顶点处取值为0。我们有标量场f 对应的梯度算子
![]()
其中▽φi(*)仅在顶点的邻接三角形上有非零值,且由于φi(*)分段线性,▽φi(*)在各个邻接三角形上为分段常值函数. 从几何角度,可以容易地给
出▽φi(*)在三角形T =(vi,vj ,vk)上的定义:
其中,R90代表绕三角形法向量nT 旋转90度,AT是三角形的面积。类似地,给定定义在三角网格曲面上的分段常值的矢量场w,我们定义在顶点vi处w的散度为:
根据梯度算子和散度算子的定义,最后可以推导出网格曲面上的标量场f在顶点vi处的拉普拉斯算子为:
![]()
这篇paper是由浙大的牛人周坤提出来的,算法最后跟拉普拉斯网格编辑的最后公式可以说是一样的,然而它的标量场给我很大的启示,这篇paper直接把(x,y,z)中的x,y,z分别当做一个标量场,然后对标量场求取梯度场,最后求取散度,然后通过泊松方程重建网格模型,实现网格变形。想要更深入的了解泊松重建,可以看看我的另外一篇博文《图像处理(十二)图像融合(1)Seamless cloning泊松克隆-Siggraph 2004》
二、算法实现
1、求取源网格曲面的梯度场,最后求取梯度场的散度。
//计算各个顶点的梯度
void CScaleDeformBrush::Get_Faces_Gradient()
{
int fn=m_BaseMesh->faces.size();
m_BaseMesh->need_adjacentfaces();
#pragma omp parallel for
for (int i=0;ifaces[i];
vec vij=m_BaseMesh->vertices[f[1]]-m_BaseMesh->vertices[f[0]];
vec vik=m_BaseMesh->vertices[f[2]]-m_BaseMesh->vertices[f[0]];
vec normalf=vij CROSS vik;
float areaf=0.5f*len(normalf);
normalize(normalf);
for (int k=0;k<3;k++)
{
m_Face_Gradient[i][k]=vec(0,0,0);
for (int j=0;j<3;j++)
{
vec ei=m_BaseMesh->vertices[f[(j+2)%3]]-m_BaseMesh->vertices[f[(j+1)%3]];
vec gradient=float(m_BaseMesh->vertices[f[j]][k]*0.5f/areaf)*(normalf CROSS ei);
m_Face_Gradient[i][k]=m_Face_Gradient[i][k]+gradient;
}
}
}
}
void CScaleDeformBrush::Compute_Divergence()
{
//计算顶点的散度
m_BaseMesh->need_adjacentfaces();
int vn=m_BaseMesh->vertices.size();
#pragma omp parallel for
for (int i=0;i&adjacentface=m_BaseMesh->adjacentfaces[i];
for (int j=0;jfaces[adjacentface[j]];
for (int k=0;k<3;k++)
{
if (f[k]==i)
{
vec ei=m_BaseMesh->vertices[f[(k+2)%3]]-m_BaseMesh->vertices[f[(k+1)%3]];
vec e1=m_BaseMesh->vertices[f[(k+1)%3]]-m_BaseMesh->vertices[f[k]];
vec e2=m_BaseMesh->vertices[f[(k+2)%3]]-m_BaseMesh->vertices[f[k]];
double cot_angle1=Cot_angle(e2,ei);
double cot_angle2=Cot_angle(-1.0f*e1,ei);
for (int xyz=0;xyz<3;xyz++)
{
m_vertices[i].VDivergence[xyz]+=0.5*(cot_angle1*(e1 DOT m_Face_Gradient[adjacentface[j]][xyz])+cot_angle2*(e2 DOT m_Face_Gradient[adjacentface[j]][xyz]));
}
break;
}
}
}
}
}
//计算v1 v2 之间夹角的余切值
double CScaleDeformBrush::Cot_angle(vec v1,vec v2)
{
vec vivo=v1;
vec vjvo=v2;
double dotvector=vivo DOT vjvo;
dotvector=dotvector/sqrt(len2(vivo)*len2(vjvo)-dotvector*dotvector);
return dotvector;
} 2、构建泊松方程的系数,矩阵A,也就是计算拉普拉斯矩阵
//邻接顶点的余切权重计算
void CScaleDeformBrush::CotangentWeights(TriMesh*TMesh,int vIndex,vector&vweight,double &WeightSum,bool bNormalize)//计算一阶邻近点的各自cottan权重
{
int NeighborNumber=TMesh->neighbors[vIndex].size();
vweight.resize(NeighborNumber);
WeightSum=0;
vector&NeiV=TMesh->neighbors[vIndex];
for (int i=0;itempnei;
Co_neighbor(TMesh,vIndex,j_nei,tempnei);
double cotsum=0.0;
for (int j=0;jvertices[vIndex]-TMesh->vertices[tempnei[j]];
vec vjvo=TMesh->vertices[j_nei]-TMesh->vertices[tempnei[j]];
double dotvector=vivo DOT vjvo;
dotvector=dotvector/sqrt(len2(vivo)*len2(vjvo)-dotvector*dotvector);
cotsum+=dotvector;
}
vweight[i]=cotsum/2.0;
WeightSum+=vweight[i];
}
if ( bNormalize )
{
for (int k=0;k&co_neiv)
{
Tmesh->need_adjacentedges();
vector&u_id_ae=Tmesh->adjancetedge[u_id];
int en=u_id_ae.size();
Tedge Co_Edge;
for (int i=0;im_edges[u_id_ae[i]];
int opsi=ae.opposite_vertex(u_id);
if (opsi==v_id)
{
Co_Edge=ae;
break;
}
}
for (int i=0;ifaces[Co_Edge.m_adjacent_faces[i]];
for (int j=0;j<3;j++)
{
if((af[j]!=u_id)&&(af[j]!=v_id))
{
co_neiv.push_back(af[j]);
}
}
}
}
//计算拉普拉斯矩阵
void CScaleDeformBrush::Get_Laplace_Matrix()
{
int vn=m_BaseMesh->vertices.size();
int count0=0;
vectorbegin_N(vn);
for (int i=0;ineighbors[i].size()+1;
}
typedef Eigen::Triplet T;
std::vector tripletList(count0);
for(int i=0;i 3、添加边界约束条件,并求解泊松方程,更新变形结果。
实时更新函数:
void CScaleDeformBrush::Update_V_Position()
{
Get_Faces_Gradient();//求梯度
int fn=m_BaseMesh->faces.size();
if(!m_ScaleFace.empty())
for (int i=0;ifaces[i].beSelect=false;
}
}
Compute_Divergence();//求散度
if(!m_MatricesCholesky)//构建拉普拉斯矩阵
{
double a=m_Laplace_Matrix.coeff(0,0) +1;
m_Laplace_Matrix.coeffRef(0,0)=a;
m_MatricesCholesky=new Eigen::SimplicialCholesky(m_Laplace_Matrix);//矩阵分解
}
int vn=m_BaseMesh->vertices.size();
for (int i=0;i<3;i++)
{
Eigen::VectorXd rhs_xyz(vn);
for (int j=0;jvertices[0][i];
Eigen::VectorXd xyz=m_MatricesCholesky->solve(rhs_xyz);//求解方程
for (int j=0;jvertices[j][i]=xyz[j];//更新结果
}
}
m_ScaleFace.clear();
m_ScaleFace.resize(fn,false);
m_BaseMesh->normals.clear();
m_BaseMesh->FaceNormal.clear();
} 接着我们来看一下用这个算法实现的简单局部编辑结果:

上面的实时局部缩放算法我是通过另外一篇paper《Differential-Based Geometry and Texture Editing with Brushes》的思想实现的,这篇paper基本上就是拷贝《Mesh Editing with Poisson-Based Gradient Field Manipulation》的思想,唯一的创新点在于它的实时交互设计方面,因为我是为了实现实时缩放刷,所以缩放的思想就是根据《Differential-Based Geometry and Texture Editing with Brushes》进行写代码的。

上面是用了上面的算法进行简单的实时编辑。
这篇paper后面还有后续的算法调整,比如梯度方向调整、还有实现网格融合、几何纹理Transfer。其中梯度方向调整是实现保特征变形的必备条件,因此如果你想要实现完整的算法,就要对梯度方向进行调整,这个可以参考我的以一篇博文《基于旋转不变量的网格变形》。在这里,我就不详细讲方向调整了,方向调整有专门的算法,paper很多。
须知:基于梯度域的变形方法和拉普拉斯网格变形算法一样,微分坐标不具有旋转不变的特点,在变形的时候,会发生曲面细节扭曲,需要对微分坐标,或者梯度方向进行调整,才能实现保特征变形,要实现旋转不变的变形,可以参考我的另外一篇博文《基于旋转不变量的网格变形》以此实现旋转不变的特点。
本文地址:http://blog.csdn.net/hjimce/article/details/46415291 作者:hjimce 联系qq:1393852684 更多资源请关注我的博客:http://blog.csdn.net/hjimce 原创文章,转载请保留本行信息
参考文献:
1、《Mesh Editing with Poisson-Based Gradient Field Manipulation》
2、微分网格处理技术
3、勾画式泊松网格编辑