神经网络和有限元方法
用神经网络来表示有限元函数
今天,我想分享的东西是许进超老师的一篇文章,ReLU Deep Neural Networks and Linear Finite Elements。你可以理解为,这是一篇译文。
主要内容
它主要是关于神经元数与层数,在用DNN表示线性有限元的时候。它告诉我们,当维数大等于2的时候,我们至少需要两个隐藏层,在用ReLu DNN表示线性有限元函数的时候。因为在其它的文献中, ⌈ log 2 ( d + 1 ) ⌉ \lceil \text{log}_2(d+1)\rceil ⌈log2(d+1)⌉at most被介绍了,当用ReLu DNN表示分片线性函数的时候。所以,当d大等于2时,2层是必要且充分的,也就是说它是最优的(optimal)。
另一方面,文章也给了我们一个估计,关于神经元的数目that are need。
再一个,作者介绍了low bit-width的DNN模型,思想来自于用DNN去表示分片线性函数的特殊结构。
最后,作者以一维的两点边值问题,做了一个数值实验。
简介
近年来,为什么DNN模型能work得这么好,依然是不清楚的。为了弄清楚它,我们可以研究DNN所表示的函数类的逼近属性(approximation properties)和表达能力(expressive power)。
万有逼近定理(Universal Approximation Theory)告诉我们,任何单隐层神经网络能够逼近任何连续函数。万有逼近定理见如下文章:
M. Leshno, V.Y. Lin, A. Pinkus and S. Schocken, Multilayer feedforward networks with a nonpolynomial activation function can approximate any function,Neural networks, 6(1993), 861-867.
另外,我们可以看到下面一个陈述是正确的:
Every ReLU DNN function in R d R^d Rd represents a continuous piecewise linear (CPWL) function dened on a number of polyhedral subdomains.
近年来,上述statement相反(converse)的论述也被证明是正确的。
更近一步,关于神经网络去表示分片线性函数的一个层数的论述,被证明了,如下:
Every CPWL function in R d R^d Rd can be represented by a ReLU DNN model with at most ⌈ log 2 ( d + 1 ) ⌉ \lceil \text{log}_2(d + 1)\rceil ⌈log2(d+1)⌉ hidden layers.
有了这些考虑,作者想要知道的就是:
- How many numbers of neurons are needed?
- What is the minimal number of layers that are needed?
结论是,我们需要用 O ( d 2 m m ! ) O(d2^{mm!}) O(d2mm!)数目的神经元去表示CPWL(continual piecewise linear),m表示子区域的数目。
进一步,为了得到更少数目的DNN表示,作者在文章中考虑了更特殊的一类函数,叫做LFE(Linear Finit Element)。
因为LFE是节点基函数(nodal basis funciotns)的一个线性组合,所以我们只需要研究节点基函数的DNN表示。
最后,作者证明了LFE能用 O ( d κ d N ) O(d\kappa ^d N) O(dκdN)数目的神经元表示,用 O ( d ) O(d) O(d)层的一个网络,这里的 κ \kappa κ取决于网格的正则性。
另外一个问题,多少层呢?对于LFE而言,2 at least当维数大于2时, ⌈ log 2 ( d + 1 ) ⌉ \lceil \text{log}_2(d+1)\rceil ⌈log2(d+1)⌉at most,那么,其实d=2,3时, ⌈ log 2 ( d + 1 ) ⌉ \lceil \text{log}_2(d+1)\rceil ⌈log2(d+1)⌉层就是最优的。当d更大是,是否是最优的,仍然是一个开放的问题。
到底CPWL和LFE的区别是什么呢?剖分是否确定?不是,只不过是用两种不同的角度看问题,得到的不同的网络而已,它们的神经元个数和层数是不同的。
作者还介绍了heavily quantized weights去压缩神经网络,比如binary和ternary权重模型。
最后,一个数值例子表明,使用 ReLU DNN 的Galerkin方法比适应性有限元方法逼近结果要好。
| 一个普通标题 | CPWL | LFE | LFE(regularity) |
|---|---|---|---|
| 神经元数目 | O ( d 2 m m ! ) O(d2^{mm!}) O(d2mm!) | O ( k h N ) O(k_hN) O(khN) | O ( d κ d N ) O(d\kappa^dN) O(dκdN) |
| 层数 | 2 at least( d ≥ 2 d\geq 2 d≥2,LFE), log 2 ( d + 1 ) \text{log}_2(d+1) log2(d+1)at most | ⌈ log 2 k h ⌉ + 1 \lceil \text{log}_2k_h\rceil +1 ⌈log2kh⌉+1 | O ( d ) O(d) O(d) |
ReLU DNN的基本性质
首先,我们需要介绍一些记号。
我们把 Θ \Theta Θ定义为:

定义作用于向量的激活函数 σ \sigma σ为:

那么,给定 d , c , k ∈ N + d,c,k\in \mathbb{N}^+ d,c,k∈N+,并且:

那么,一般的从 R d \mathbb{R}^d Rd到 R c \mathbb{R}^c Rc可以写为:

这里我们假定 f 0 ( x ) = Θ ( x ) f^0(x)=\Theta(x) f0(x)=Θ(x)。更简单地,我们可以写为:

这里的 Θ i \Theta^i Θi是表示第i层到第i+1层的。一般我们称这样的DNN为k+1层DNN,或者说有k个隐藏层。
ReLU(rectified linear unit)的定义如下:

容易看到ReLU函数是CPWL的,自然它们的线性组合也是CPWL的。那么,我们会有如下一个引理:

我们把J个隐藏层且输出为一个变量的ReLu DNN,用一个记号来表示,即:

首先,让我们来看一下 D N N 1 DNN_1 DNN1,也就是有一个隐藏层的ReLu DNN,也就是:

这里的上标m表示隐藏层神经元的数目。
restrict D N N 1 m DNN_1^m DNN1m在 Ω \Omega Ω,我们用如下的记号:

一些文献已经证明了, D N N 1 ( Ω ) DNN_1(\Omega) DNN1(Ω)在 C 0 ( Ω ) C^0(\Omega) C0(Ω)上是稠密的(dense)。
当然,关于ReLu DNN,我们还有一个渐近(asymptotic)误差估计:

这里的hat是表示傅里叶变换。
另外,我们还有一个定理:

LFE的ReLu DNN表示
我们知道,CPWL能被ReLu DNN表示出来。线性有限元函数(Linear Finite Element Function,LFE)是一类特殊的CPWL。它也能被ReLu DNN表示出来。
为了说明这一点,我们先回顾一下有限元方法的相关知识,以及引入我们的符号。
有限元网格 T h = { τ k } T_h = \{\tau_k\} Th={τk},节点表示为 N h N_h Nh,那么分片线性函数空间可以写为:

节点基函数(nodal basis function)为:


对任何 v ∈ V h v\in V_h v∈Vh,我们有:

用 N i N_i Ni表示与i节点有关的单元的标号,即:
![]()
我们用 k h k_h kh表示和节点有关的单元数目的最大值(maximum),也就是:

第i个节点的支集表示为:

我们说 T h T_h Th是局部凸(locally convex),如果每个支集是凸的。
下面我们来看看局部凸网格的LFE的ReLU DNN表示。
因为分片线性函数可以用节点基函数线性表出,所以我们我们只需要研究节点基函数的ReLU DNN表出。
一维情况下,我们有:

对于多维的情况,我们先介绍一个引理:

这里的 g k g_k gk是节点基函数的不同“片”,在整个定义域上的一个延伸。把它们取个最小,就得到了节点基函数。这个证明有点繁琐(Tedious)。让我们skip it。
关于这个引理有个remark:

下面我们介绍一个重要的定理:

证明如下:
我们可以将取最小值写成单隐藏层ReLU NN,如下:

我可以check it,虽然我不知道是怎么想到它的。其实,这是一个单隐层的ReLU DNN。两个到四个,再到一个。
根据之前那个引理,我们有:

为了方便,我们把 N ( i ) N(i) N(i)写为:

那么,我们有:

我们可以对split出来的两项继续做划分,直到最后为1项或者2项。然后,我们利用:

根据以上的过程,我们知道,我们可以将基函数写成 ⌈ log 2 k h ⌉ + 1 \lceil \text{log}_2 k_h\rceil+1 ⌈log2kh⌉+1个隐藏层的DNN。WHY + 1?每一次划分不应该加两层吗?
考虑二叉树的结构,k层的二叉树总共有 2 k − 1 2^k -1 2k−1个节点,那么神经元的个数大概(至多)为:

根据CWPL和节点基函数的表出关系,我们能得到分片线性函数能用 ⌈ log 2 k h ⌉ + 1 \lceil \text{log}_2 k_h\rceil+1 ⌈log2kh⌉+1的隐藏层表出。神经元的数目最多为 O ( k h N ) O(k_hN) O(khN)。
我们现在考虑一类所谓的形状规则的有限元网格,满足:

那么,我们有如下推论:

DNN方法的一个误差估计,考虑 D N N 1 DNN_1 DNN1,有如下结论:

事实上,后面会提到,单隐层的DNN是没有办法表示线性有限元函数的。
我们可以找到一个DNN的结构,使得用其去逼近有限元函数的结果更好:

维数大于1时,单隐层ReLU DNN无法表示LFE
浅层的ReLU DNN是无法精确地表示某些有限元函数的,精确描述如下:

这个证明啊,really a trifle。作者用了三页纸来完成这个证明。我这里就不提了。
这也是这篇文章的一个主要结果之一。
一般CPWL的ReLU DNN逼近(approach)
一般的方法,相比于前面提到的逼近方法,需要更少的层数,但是需要多得多(significantly,extremely)的神经元。
下面先不带证明地列出一些主要的结果:

这里的 f i f_i fi是分片线性函数在片 Ω i \Omega_i Ωi上的值。
我们也有lattice表示定理,如下:

进一步,我们有这样一个结果:

这个定理告诉我们,我们可以用不超过 log 2 ⌈ d + 1 ⌉ \text{log}_2\lceil d+1 \rceil log2⌈d+1⌉的隐藏层去表示它。
这个结果和前面的LFE的表示结果相比起来,虽然需要的层数降低了一些,但是需要的神经元多了非常多。
至此,对于一个局部凸的有限元网格,我们现在又两种不同的方式来表示它。
我们用这种表示CPWL的一般方式来表示FEL,有如下的一个结果:

由此,我们就可以比较出两个网络结构来表示分片线性函数的一个差异,一个需要 ⌈ log 2 ( d + 1 ) ⌉ \lceil \text{log}_2(d+1)\rceil ⌈log2(d+1)⌉隐层 O ( d 2 ( d + 1 ) k h ) O(d2^{(d+1)k_h}) O(d2(d+1)kh)的神经元,一个需要 ⌈ log 2 k h ⌉ + 1 \lceil \text{log}_2k_h\rceil +1 ⌈log2kh⌉+1隐层 O ( k h N ) O(k_hN) O(khN)的神经元。前者虽然层数少,但是需要多得多的神经元。
低位宽的DNN模型
这部分介绍了一种特殊的ReLU DNN模型,它能表示所有的CPWL函数。它的参数要么是0,要么是2的次方,也就是说:
By our results in previous sections, we find a special family of ReLU DNN which has at most one general layers and all other layers with low bit-width parameters.
不加证明,我们有如下结果:

数值算例
DNN方法求解PDE,考虑如下模型问题:

一般使用DNN求解PDE用的是配点方法,也就是一个最小二乘问题:

这里的 u N u_N uN是DNN的输出,使用平滑的激活函数,比如说sigmoid函数。
当然,还有一些其他的方法。
有限元方法一般采用适应有限元方法和移动网格方法。
适应网格方法有如下的误差估计:

DNN方法一般不需要网格,但是也需要离散点。DNN-Galerkin方法连点都不需要。
单隐层DNN的误差估计如下所示:
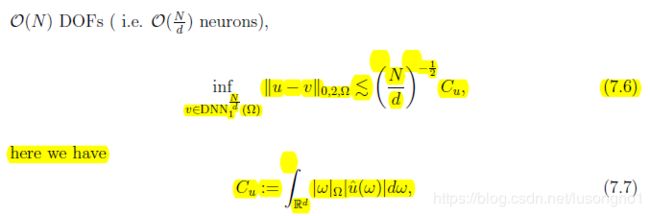
这里 u ^ \hat u u^是将函数延拓到整个(entire)区间上后做的傅里叶变换。
我们来做一个一维的两点边值问题的例子。考虑如下模型问题:

剖分网格如下:
![]()
定义单隐层ReLU DNN为:

这里的 θ i \theta_i θi表示区间 [ t i − 1 , t i ] [t_{i-1},t_i] [ti−1,ti]上的斜率。
为了满足边界条件,我们需要有约束(上标到N,文中写错了):

我们最小化能量函数:

交替以下两个步骤:

结论
足够多层的ReLU DNN是可以重构有限元函数的,文中讨论了两种不同的逼近方式。
One theoretically interesting question addressed in this paper concerns the minimal number of layers that are needed in a DNN model to reproduce general continuous piecewise linear functions.
作者证明了维数大于1是,最小需要两个隐藏层来表示分片函数,由于上限 log 2 ( d + 1 ) \text{log}_2(d+1) log2(d+1)的约束,二三维的时候, log 2 ( d + 1 ) \text{log}_2(d+1) log2(d+1)就是最优的,更高维的时候,是否是最优的,还不知道。
不说消耗的事情,一维例子表明DNN的Galerkin逼近是比适应有限元方法是更精确的。但是呢,computational cost is a serious issue。