激光slam理论与实践
本篇是记录曾书格老师的课程《激光slam理论与实践》
先贴一下个人总结(有理解的不正确的,麻烦指出来):
第一章:激光SLAM简要介绍
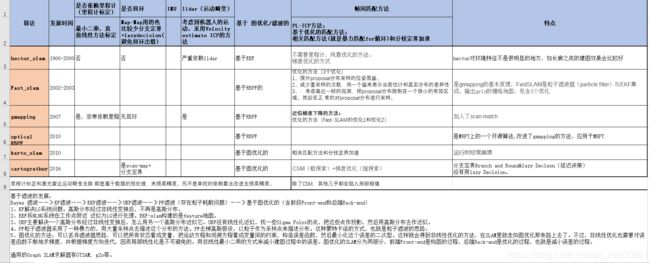
1、输出Metrical map尺度地图,slam分为两种:基于滤波的 filter-based 的SLAM,和Graph-based的SLAM。
2、
(1)基于Graph-based的代表是cartographer,可以修复 t 时刻之前的误差分为两部分Front-end ,和Back-end。
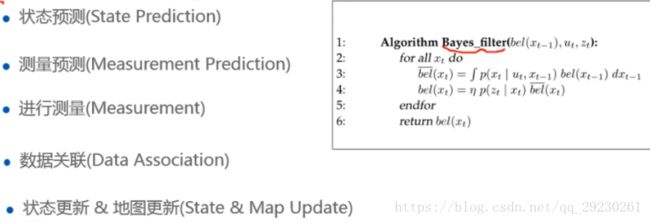
(2)基于PF的代表gmapping,只能估计X(t)当前时刻的位姿,不能修复之前时刻产生的误差。在大面积的情况下,就无法建图了。粒子滤波实际上是一个贝叶斯估计的过程,其流程是一个状态预测的过程,分为6步:
卡尔曼是贝叶斯在线性高斯的特殊情况。
(3)

实际中,IMU算角度,里程计算距离
(4)帧间匹配算法:
ICP 是计算点对点的,没人用了。而PI-ICP是计算点对线的。
NDT用于三维的slam。
CSM:是最主要的方法。

scan-scan已经没人用了;
scan-to-Map代表是cartographer。
Map-to-Map还没有用,但是效果最好。与X(t)时刻之前的几帧进行回环检测。
3、2D激光SLAM(用的2D的激光雷达)
(1)2D激光slam的帧间匹配
(A)PI-ICP
(B)CSM(Correlation Scan Match)
(C)梯度优化的方法:Hector—SLAM
(D)CSM+梯度优化:cartographer
(2)2D 激光SLAM的回环检测方法
(A)分支定界Branch and Bound&lazy Decison(延迟决策) ,代表:cartographer
(B)Scan-to-Map
(3)
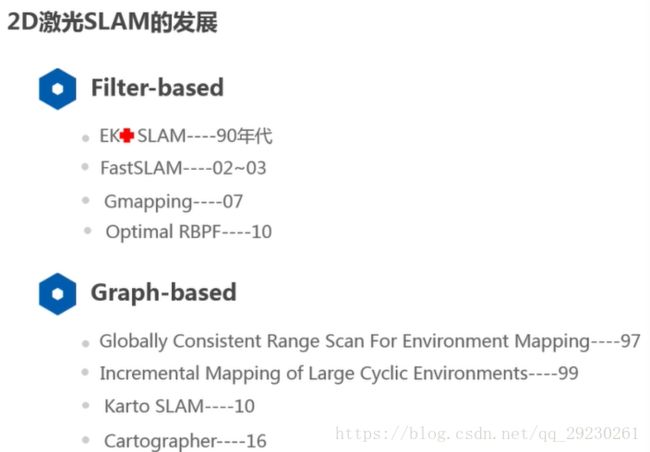
(A)EKF-SLAM构建的是feature 地图,而不是grid栅格地图,所以无法用于导航,只能用于定位。
(B)gmapping是Grid版本的FastSLAM,加入了scan-match。
(C)在Optimal RBPF在gmapping上做了优化,是MRPT上的一个开源算法。
2010年之后就由FP 转化为 图优化的方法了。
Karto SLAM 运行时经常崩溃。所以在此基础上Catographer作了优化。Catographer是所以开源算法中效果最好的。
(4)、数据的预处理

4、3D激光雷达
(1)3D激光雷达的帧间匹配
(A)Point-to-Plance ICP 点到面的匹配
(B)Feature-based Method
第二章:传感器数据处理I:里程计运动模型及标定
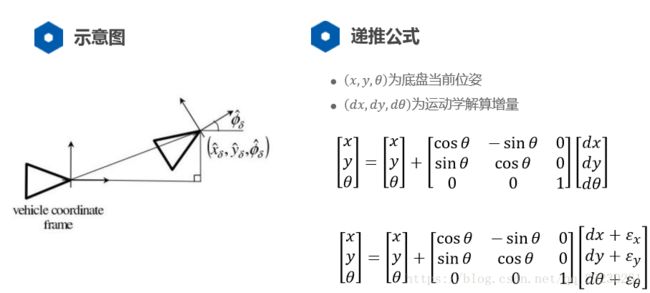
1、里程计运动模型
(1)两轮差分底盘的运动学模型
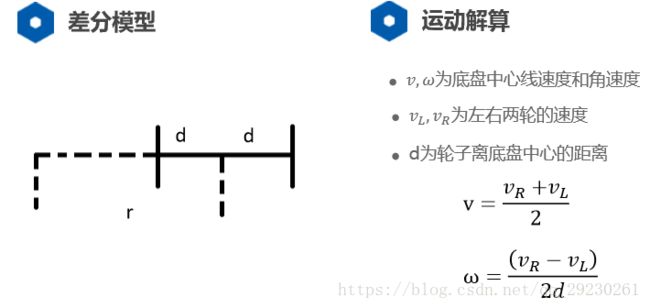
(2)航迹推算(Dead Reckoning)
2、里程计标定
(1)线性最小二乘的基本原理
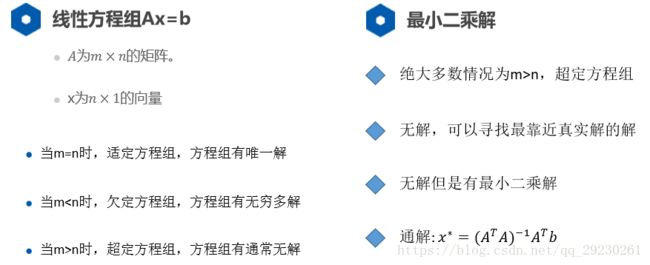
通常就是 求解一个近似解。
(2)最小二乘的直线拟合
(3)最小二乘在里程计标定中的应用:
a,直接线性方法,精度不高,但实现简单;用这个方法
b,基于模型的方法,精度高,但是现实起来相当复杂,是一个非线性的过程。不用。
作业:实现一个直接线性方法的里程计标定模块
小结:由于机器人结构的系统性误差(比如轮子直径的大小不一样,机械结构缝隙等),所以需要坐里程计标定,达到去除系统误差的目的,而随机误差无法去除。
第三章:传感器数据处理II:激光雷达数学模型和运动畸变去除
1、概念
(1)激光lidar介绍:基于三角测距原理,距离越近,精度相对越高。而飞行时间(TOF)远距离时精度才可以,价格昂贵。高端的lidar有德国的sick,日本的北阳。
固态lidar:是一个发展趋势,价格低,类似于深度相机了,100线——300线。
如果lidar的帧率小于10HZ的话,那么运动畸变是非常明显的。
(2)激光lidar数学模型介绍:
光束模型:一帧激光与地图的重合程度,计算量太大,现在已经不用了。
似然场模型:对图像进行高斯平滑,计算量低。应用的多。
(3)运动畸变介绍:
产生的原因:在获取一帧激光lidar的数据用时 t 时,机器人的位置发生了运动,导致每个激光点的基准位置不是固定的。
2、畸变去除方法
(1)纯估计方法:ICP 的方法,就是点云匹配。
考虑到机器人的运动,采用VICP的方法。(Velocity estimate ICP)
(2)传感器辅助方法:(IMU/odom)
odom,直接测量位移和角度。更新频率(100Hz——200Hz),而IMU测量的是加速度,还需要积分。
二次曲线的近似:一帧激光数据N个激光点,每个激光点对应的位姿{P1,P2 ... Pn}通过这种方法得到,把转换后的激光数据发布出去。
作业:实现一个激光雷达运动畸变去除模块
小结:由于机器人存在运动畸变,所以要发布publish经过去除畸变的激光lidar数据。
第四章:激光SLAM的前端配准方法
帧间匹配方法:
(1)ICP 匹配方法:点到点的距离作为误差,一阶收敛。
(2)PL-ICP方法:点到线的距离作为误差,二阶收敛,精度比ICP更高。
(3)基于优化的匹配方法(Optimization-based Method):应用于Hector SLAM 和cartographer
梯度的优化:Hector SLAM,不需要里程计,纯靠优化的方法。
cartographer 是CSM+优化。
(4)相关匹配方法和分枝定界加速:Karto SLAM,cartographer,分枝定界在相关方法中的加速作用。

第五章:基于滤波器的激光SLAM方法(Filter-based)
1、(1)只估计当前时刻的状态X(t)叫滤波。视觉地图——feature特征地图;激光——》栅格地图

2、
(1)Bayes滤波:是一类方法的统称,卡尔曼家族和PF都属于贝叶斯滤波。
(2)粒子滤波:PF是Bayes滤波的特例。应用于物体跟踪,机器人定位,SLAM导航。用一系列的粒子近似概率分布。
有一个重采样的过程,即去除权重小的粒子。权重表示和地图的匹配程度。
重采样的目的:生成后验分布的粒子群。总粒子数不变。
对于SLAM,存在粒子耗散问题,且无法解决,所以在环境小的时候才有用。
(3)FastSLAM:是gmapping的基本原理,也是基于PF的。存在三个问题和优化a,b,c:
a.每个粒子都包含自己的栅格地图,占用较大的内存;保持粒子数量较小,提升proposal采样的位姿质量;
b.粒子耗散问题;缓解粒子耗散;减少重采样的次数;
c.在a的基础上再优化,把proposal限制在一个较小的区域
(4)Gmapping:以FastSLAM为基础。在fastSLAM的基础上实现了优化a和b,没有使用优化c。
主要是两个函数: addScan( ) 和 processScan( )
第六章:基于图优化的激光SLAM方法(Grid-based)
1、Grid-based 是基于非线性最小二乘原理的求解。Grid-based包含前段Front-end和后端Back-end。
2、非线性最小二乘:f(x) = z ,f(x)是一个非线性的函数 ,z可以是一个预测值,然后通过传感器可以得到一个测量值z',根据二者就可以去非线性最小二乘。
3、有回环检测。
4、高斯牛顿方法
5、cartographer方法中mapping_2d目录:
第七章:基于已知定位的建图
位姿估计包含 帧间匹配和优化的方法,两者构成图优化,通过对机器人的位姿(x ,y , θ)来构建地图。
1、地图分类:(栅格地图、特征地图和点云地图,都属于)尺度地图、拓扑地图、语义地图
2、覆盖栅格建图算法(gmapping里面用的这个):
栅格地图的数学模型:给定机器人的位姿(由里程计信息得到)和激光lidar的数据,来估计出栅格地图。
地图估计:栅格是一个二元随机变量。1 标准占用,0表示没被占用。
激光穿过的栅格为free,激光击中的栅格为occupied
3、计数(count model)建图算法:
激光击中的次数 / 激光穿过的次数 到达一个比值,就表示障碍物,occupied。
第八章: 3D激光SLAM介绍
1、3D激光SLAM
2D激光SLAM和3D激光SLAM的区别:
(1)2D :单线激光lidar,只能在一个截面,形成2D栅格地图,室内机器人
(2)3D:多线激光lidar,形成三维点云地图或者三维栅格地图,室外移动机器人
2、3D帧间匹配:
(1)点面ICP
(2) Feature-based method
(3) NDT 方法 normal-distribution-Transform
2、LOAM (lidar odometry and mapping)
(1)是3D 激光SLAM算法,只有匹配,没有回环。
(2) KITTI数据集Odometry排行榜上长期霸占第一