变分自编码器VAE(Variational Autoencoders)及示例代码
这里写一个中文版快速入门笔记,更细致的理论分析和推导见:
Tutorial on Variational Autoencoders
VAE是一个学习复杂分布的无监督学习模型。在实践中,给定数据 X X X,我们往往想得到 P ( X ) P(X) P(X),使得那些真实数据概率较大,而随机噪声概率较小。同时,我们还希望能够生成更多其他类似“真实”的例子,进而丰富我们的数据,典型例子如动画设计等领域,这就是“生成”模型的motivation。
形式化的表述为:已知数据 X X X是从某未知真实数据分布 P g t ( X ) P_{gt}(X) Pgt(X)采样而来,我们的目标是学习一个可采样模型 P P P,且 P P P和 P g t ( X ) P_{gt}(X) Pgt(X)尽可能相似。
潜变量模型
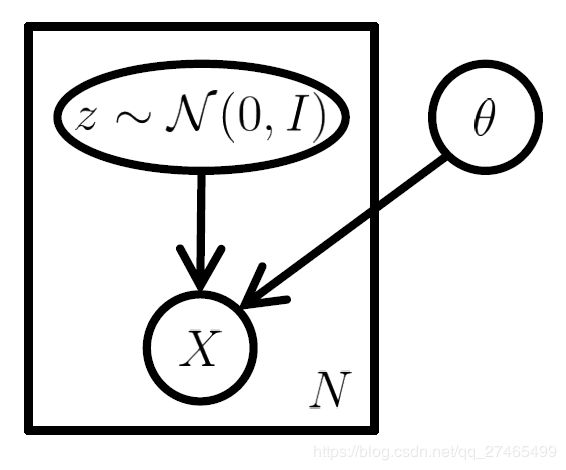
真实数据 X X X可能是高维的,并且依赖关系复杂,潜变量模型将问题按步骤分解:首先假设有一潜变量 z ∈ Z z\in Z z∈Z, Z Z Z是隐空间,易于根据概率密度函数 P ( z ) P(z) P(z)采样;其次,假定有一族函数 X ′ = f ( z ; θ ) X'=f(z;\theta) X′=f(z;θ),将 z z z映射为数据 X ′ X' X′。其中, z z z为随机变量, θ \theta θ为固定参数, X ′ X' X′为与真实数据 X X X类似的"新"数据。
学习的目的就是要优化 θ \theta θ,目标为最大化真实数据 X X X的概率:
P ( X ) = ∫ P ( X ∣ z ; θ ) P ( z ) d z P(X)=\int P(X|z;\theta)P(z)dz P(X)=∫P(X∣z;θ)P(z)dz其中 P ( X ∣ z ; θ ) = N ( X ∣ f ( z , θ ) , σ 2 ∗ I ) P(X|z;\theta)=N(X|f(z,\theta),\sigma^2 * I) P(X∣z;θ)=N(X∣f(z,θ),σ2∗I)
注意到生成分布选择的是Guass分布。其他分布也可以,但需要满足: P ( X ∣ z ; θ ) P(X|z;\theta) P(X∣z;θ)可计算且在 θ \theta θ处连续,可通过梯度下降进行优化。
当不使用潜变量生成模型,直接取确定性的 X ′ = f ( z ; θ ) X'=f(z;θ) X′=f(z;θ)时,相当于生成分布是一个Dirac delta分布,在 θ \theta θ上不连续。此时模型就是传统自编码器模型,它是点对点的,可以进行压缩降维,但不具备直接生成功能(其他未知的 z ′ z' z′对应的 X ′ X' X′是什么完全不清楚)。实际上,变分自编码器和传统自编码器只是在网络结构上有一定的相似之处,但本质完全不同。
变分自编码器
在潜变量模型的基础上,还需处理两个问题:
- P ( z ) P(z) P(z)的选择,事实上,任意 d d d维分布都可由 d d d个正态分布的变量通过足够复杂的函数映射而成,只需取 P ( z ) = N ( 0 , I ) P(z)=N(0,I) P(z)=N(0,I)即可,进一步的说明可参见原文。
- 将上面的优化目标 P ( X ) P(X) P(X)转化为可计算梯度的Loss Function,这就用到变分自编码器的另一个核心方法——变分法。
考虑直接使用蒙特卡洛方法: P ( X ) ≈ 1 n ∑ i P ( X ∣ z i ) P(X) \approx \frac{1}{n}\sum_iP(X|z_i) P(X)≈n1∑iP(X∣zi),有两个弊端:1) 复杂的问题对于采样的样本量需求过大;2) 高斯分布设定下的极大似然度量等价于欧式平方距离,不满足复杂任务需求,对于这一点我们在文末给予详细讨论。
VAE通过改变采样过程同时解决以上两个弊端。
设定优化目标
事实上,大多数潜变量 z z z对于生成 X X X没有贡献,也就是说, P ( X ∣ z ) ≈ 0 P(X|z)\approx0 P(X∣z)≈0。VAE的核心思想就是,尽量只采样那些对生成 X X X有贡献的 z z z,然后根据其估计 P ( X ) P(X) P(X)。
于是,我们需要一个新的函数 Q ( z ∣ X ) Q(z|X) Q(z∣X)(近似后验分布),估计可能生成 X X X的 z z z的分布,希望以此减小 z z z的采样空间,这样我们就可以轻松地通过
P ( X ) ≈ E z ∼ Q P ( X ∣ z ) P(X)\approx E_{z\sim Q}P(X|z) P(X)≈Ez∼QP(X∣z)来估计 P ( X ) P(X) P(X)。
接下来,要最大化 P ( X ) P(X) P(X),就需要对 Q Q Q有所约束。约束从哪里来?
固定 X X X,对于任意 Q ( z ∣ X ) Q(z|X) Q(z∣X),我们希望其接近真实后验分布 P ( z ∣ X ) P(z|X) P(z∣X),考察其KL散度:
D [ Q ( z ∣ X ) ∣ ∣ P ( z ∣ X ) ] = E z ∼ Q [ log Q ( z ∣ X ) − log P ( z ∣ X ) ] D[Q(z|X)||P(z|X)]=E_{z\sim Q}[\log Q(z|X)-\log P(z|X)] D[Q(z∣X)∣∣P(z∣X)]=Ez∼Q[logQ(z∣X)−logP(z∣X)]对上式使用贝叶斯规则:
D [ Q ( z ∣ X ) ∣ ∣ P ( z ∣ X ) ] = E z ∼ Q [ log Q ( z ∣ X ) − log P ( X ∣ z ) − log P ( z ) ] + log P ( X ) D[Q(z|X)||P(z|X)]=E_{z\sim Q}[\log Q(z|X)-\log P(X|z)-\log P(z)]+\log P(X) D[Q(z∣X)∣∣P(z∣X)]=Ez∼Q[logQ(z∣X)−logP(X∣z)−logP(z)]+logP(X)变形得到:
log P ( X ) − D [ Q ( z ∣ X ∣ ) ∣ ∣ P ( z ∣ X ) ] = E z ∼ Q [ log P ( X ∣ z ) ] − D [ Q ( z ∣ X ) ∣ ∣ P ( z ) ] \log P(X)-D[Q(z|X|)||P(z|X)]=E_{z\sim Q}[\log P(X|z)]-D[Q(z|X)||P(z)] logP(X)−D[Q(z∣X∣)∣∣P(z∣X)]=Ez∼Q[logP(X∣z)]−D[Q(z∣X)∣∣P(z)]上式就是VAE的核心:左侧是我们的优化目标,称之为变分下界——最大化 P ( X ) P(X) P(X),最小化 Q Q Q模拟真实后验分布的误差;右侧是我们的计算形式——当选择合适的 Q Q Q时,就可以计算梯度并使用SGD进行优化(意味着 Q Q Q和 P ( z ) P(z) P(z)都必须是连续分布)。右侧在形式上接近自编码器: Q Q Q将 X X X编码为 z z z, P P P将 z z z解码为 X X X。该方法还有一个额外的好处,在优化过程中,只要选取一个高容量的 Q Q Q,那么左侧第二项就会尽可能的减小,我们可以直接使用 Q ( z ∣ X ) Q(z|X) Q(z∣X)代替 P ( z ∣ X ) P(z|X) P(z∣X)。
优化方法
通常取 Q ( z ∣ X ) = N ( z ∣ μ ( X ) , Σ ( X ) ) Q(z|X)=N(z|\mu(X),\Sigma(X)) Q(z∣X)=N(z∣μ(X),Σ(X)),其中 μ \mu μ和 Σ \Sigma Σ都通过神经网络实现,则 D [ Q ( z ∣ X ) ∣ ∣ P ( z ) ] D[Q(z|X)||P(z)] D[Q(z∣X)∣∣P(z)]是两个多元高斯分布之间的KL散度:
D ( N ( μ 0 , Σ 0 ) ∣ ∣ N ( μ 1 , Σ 1 ) ) = 1 2 ( t r ( Σ 1 − 1 Σ 0 ) + ( μ 1 − μ 0 ) T Σ 1 − 1 ( μ 1 − μ 0 ) − k + log ( det Σ 1 det Σ 0 ) ) D(N(\mu_0,\Sigma_0)||N(\mu_1,\Sigma_1))=\frac{1}{2}\Big(tr\big(\Sigma_1^{-1}\Sigma_0\big)+(\mu_1-\mu_0)^T\Sigma_1^{-1}(\mu_1-\mu_0)-k+\log\Big(\frac{\det\Sigma_1}{\det\Sigma_0}\Big) \Big) D(N(μ0,Σ0)∣∣N(μ1,Σ1))=21(tr(Σ1−1Σ0)+(μ1−μ0)TΣ1−1(μ1−μ0)−k+log(detΣ0detΣ1))其中 k k k是分布的维度。
在当前设定下可简化为:
D ( N ( μ ( X ) , Σ ( X ) ) ∣ ∣ N ( 0 , I ) ) = 1 2 ( t r ( Σ ( X ) ) + ( μ ( X ) ) T ( μ ( X ) ) − k − log det ( Σ ( X ) ) ) D(N(\mu(X),\Sigma(X))||N(0,I))=\frac{1}{2}\Big(tr\big(\Sigma(X)\big)+(\mu(X))^T(\mu(X))-k-\log\det(\Sigma(X) )\Big) D(N(μ(X),Σ(X))∣∣N(0,I))=21(tr(Σ(X))+(μ(X))T(μ(X))−k−logdet(Σ(X)))接下来我们就可以使用SGD来进行优化。
还存在的一个技术性问题是: E z ∼ Q [ log P ( X ∣ z ) ] E_{z\sim Q}[\log P(X|z)] Ez∼Q[logP(X∣z)]同时依赖 P P P和 Q Q Q的参数,如下图左侧所示:
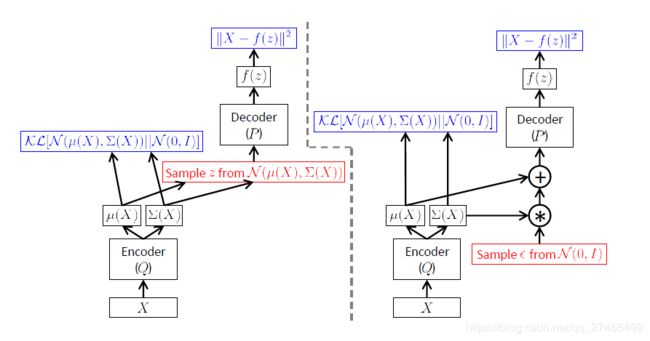
在BP的过程中,误差需要穿过一个采样层,该操作不连续且没有梯度。SGD可以处理随机输入,但不能处理随机操作!解决方法称为“重新参数化”,如上图右侧所示。先采样 ϵ ∼ N ( 0 , 1 ) \epsilon\sim N(0,1) ϵ∼N(0,1),然后令 z = μ ( X ) + Σ 1 / 2 ( X ) ∗ ϵ z=\mu(X)+\Sigma^{1/2}(X)*\epsilon z=μ(X)+Σ1/2(X)∗ϵ。则实际要优化的函数为:
E X ∼ D [ E ϵ ∼ N ( 0 , 1 ) [ log ∣ P ( X ∣ z = μ ( X ) + Σ 1 / 2 ( X ) ∗ ϵ ) ] − D ( Q ( z ∣ X ) ∣ ∣ P ( z ) ) ] E_{X\sim D}\Big[E_{\epsilon\sim N(0,1)}\big[\log |P(X|z=\mu(X)+\Sigma^{1/2}(X)*\epsilon)\big]-D(Q(z|X)||P(z))\Big] EX∼D[Eϵ∼N(0,1)[log∣P(X∣z=μ(X)+Σ1/2(X)∗ϵ)]−D(Q(z∣X)∣∣P(z))]
生成&测试

生成新样本时,直接从 z z z的先验分布 N ( 0 , I ) N(0,I) N(0,I)采样生成新样本即可。此外,通过从 Q Q Q中采样可得到新样本生成概率的良好估计。
讨论
毫无疑问,对于固定的“解码器” P P P,如果 P ( z ∣ X ) P(z|X) P(z∣X)不是高斯分布,则 D [ Q ( z ∣ X ∣ ) ∣ ∣ P ( z ∣ X ) ] D[Q(z|X|)||P(z|X)] D[Q(z∣X∣)∣∣P(z∣X)]永远不可能为0,我们只能得到 log P ( X ) \log P(X) logP(X)的一个下界。是否存在函数 f f f能够最大化 log P ( X ) \log P(X) logP(X)同时使得 P ( z ∣ X ) P(z|X) P(z∣X)对任意 X X X都是高斯分布?仍然是一个开放问题。某些简单情形已经得到证明。
从信息论的“最小描述长度”理论也可以对VAE进行解释:
log P ( X ) \log P(X) logP(X):当前模型对X完全理想编码所需bit
D [ Q ( z ∣ X ∣ ) ∣ ∣ P ( z ∣ X ) ] D[Q(z|X|)||P(z|X)] D[Q(z∣X∣)∣∣P(z∣X)]:当前编码是次优编码,未能包含生成x的所有信息,这部分需要减去
E z ∼ Q [ log P ( X ∣ z ) ] E_{z\sim Q}[\log P(X|z)] Ez∼Q[logP(X∣z)]:从 z z z生成 X X X编码所需bit
D [ Q ( z ∣ X ) ∣ ∣ P ( z ) ] D[Q(z|X)||P(z)] D[Q(z∣X)∣∣P(z)]:使用后验分布而不是先验分布所带来的额外信息量,需要减去
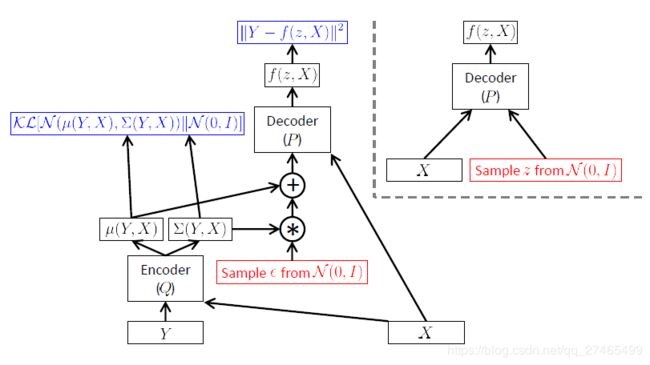
条件变分自编码器(CVAE)
将上述VAE推广到多模态,优化目标从 P ( Y ) P(Y) P(Y)变成 P ( Y ∣ X ) P(Y|X) P(Y∣X)(这里对X,Y进行了重新定义)
关于相似性度量
一句话,相似性度量决定了生成模型在生成新样本时,新样本与原样本微小差异的方向。
例如简单的潜变量模型,采用平方距离度量,在生成新样本时,就倾向于产生与原样本具有较小平方距离的新样本。如下图所示,a为原样本,b c为新样本,b与a的平方距离更小(c是a的图像整体平移得到的)。在生成过程中,简单的潜变量模型就更倾向于生成b而不是c。这与我们的直观印象是相悖的,往往需要根据经验和具体问题来人为设计相似性度量。

VAE是如何解决这个问题的?VAE给直接采样过程加入了新的信息,就是模拟后验分布 Q ( z ∣ X ) Q(z|X) Q(z∣X),生成样本的时候就不是在潜变量 z z z的整个空间采样(通过 P ( z ) P(z) P(z)),而是在其子空间(通过 Q ( z ∣ X ) Q(z|X) Q(z∣X))采样,从模型的解释性上来说,潜变量 z z z存储的就是类似于数字,角度,位置,线条粗细,风格等类似的一系列潜在因素。从优化目标来看,要同时最大化 log P ( X ) \log P(X) logP(X)和最小化 D [ Q ( z ∣ X ) ∣ ∣ P ( z ∣ X ) ] D[Q(z|X)||P(z|X)] D[Q(z∣X)∣∣P(z∣X)],对子空间的精确限制就是在避免(b)这种不合理清形的出现。另一方面,从优化目标的计算形式来看(虽然不是非常精确,但也能窥到一些端倪),要同时最小化平方距离和 D [ Q ( z ∣ X ) ∣ ∣ P ( z ) ] D[Q(z|X)||P(z)] D[Q(z∣X)∣∣P(z)],也就是说既要新样本在平方距离上接近,同时也要潜空间上引入的信息量更小。对于样本b来说,虽然平方距离上接近,但是要生成这样的样本,潜空间上的决定因素和a差异很大,而c在潜空间上和a的一致性更高。从而,VAE更倾向于生成c而非b。
总之,简单的潜变量模型对 z z z所在因素空间的划分是只以平方距离为导向的、平均化的、混乱的,使得非a所属子因素空间内的 z z z强行生成,最后得到了b。而VAE为每个样本划分了专属的子因素空间,使得各自子因素空间内的 z z z只致力于生成对应的 X ′ X' X′,同时 D [ Q ( z ∣ X ) ∣ ∣ P ( z ∣ X ) ] D[Q(z|X)||P(z|X)] D[Q(z∣X)∣∣P(z∣X)]的优化约束保证了子因素空间划分的合理性。
总结
- AE是点对点模型,生成没有任何数学保证;
- 潜变量模型强行用其他潜因素生成目标,只保证平方距离小,风格差异大;
- VAE优化目标左侧,既要生成概率大,又要模拟后验分布精准(潜空间合理划分)
- VAE优化目标右侧,b平方loss小而 D [ Q ( z ∣ X ) ∣ ∣ P ( z ) ] D[Q(z|X)||P(z)] D[Q(z∣X)∣∣P(z)]loss大,c平方loss大而 D [ Q ( z ∣ X ) ∣ ∣ P ( z ) ] D[Q(z|X)||P(z)] D[Q(z∣X)∣∣P(z)]loss小。
一个简单的VAE代码:
import tensorflow as tf
class VariationalAutoencoder(object):
def __init__(self, n_input, n_hidden, optimizer = tf.train.AdamOptimizer()):
self.n_input = n_input
self.n_hidden = n_hidden
network_weights = self._initialize_weights()
self.weights = network_weights
# model
self.x = tf.placeholder(tf.float32, [None, self.n_input])
self.z_mean = tf.add(tf.matmul(self.x, self.weights['w1']), self.weights['b1'])
self.z_log_sigma_sq = tf.add(tf.matmul(self.x, self.weights['log_sigma_w1']), self.weights['log_sigma_b1'])
# sample from gaussian distribution
eps = tf.random_normal(tf.stack([tf.shape(self.x)[0], self.n_hidden]), 0, 1, dtype = tf.float32)
self.z = tf.add(self.z_mean, tf.multiply(tf.sqrt(tf.exp(self.z_log_sigma_sq)), eps))
self.reconstruction = tf.add(tf.matmul(self.z, self.weights['w2']), self.weights['b2'])
# cost
reconstr_loss = 0.5 * tf.reduce_sum(tf.pow(tf.subtract(self.reconstruction, self.x), 2.0))
latent_loss = -0.5 * tf.reduce_sum(1 + self.z_log_sigma_sq
- tf.square(self.z_mean)
- tf.exp(self.z_log_sigma_sq), 1)
self.cost = tf.reduce_mean(reconstr_loss + latent_loss)
self.optimizer = optimizer.minimize(self.cost)
init = tf.global_variables_initializer()
self.sess = tf.Session()
self.sess.run(init)
def _initialize_weights(self):
all_weights = dict()
all_weights['w1'] = tf.get_variable("w1", shape=[self.n_input, self.n_hidden],
initializer=tf.contrib.layers.xavier_initializer())
all_weights['log_sigma_w1'] = tf.get_variable("log_sigma_w1", shape=[self.n_input, self.n_hidden],
initializer=tf.contrib.layers.xavier_initializer())
all_weights['b1'] = tf.Variable(tf.zeros([self.n_hidden], dtype=tf.float32))
all_weights['log_sigma_b1'] = tf.Variable(tf.zeros([self.n_hidden], dtype=tf.float32))
all_weights['w2'] = tf.Variable(tf.zeros([self.n_hidden, self.n_input], dtype=tf.float32))
all_weights['b2'] = tf.Variable(tf.zeros([self.n_input], dtype=tf.float32))
return all_weights
def partial_fit(self, X):
cost, opt = self.sess.run((self.cost, self.optimizer), feed_dict={self.x: X})
return cost
def calc_total_cost(self, X):
return self.sess.run(self.cost, feed_dict = {self.x: X})
def transform(self, X):
return self.sess.run(self.z_mean, feed_dict={self.x: X})
def generate(self, hidden = None):
if hidden is None:
hidden = self.sess.run(tf.random_normal([1, self.n_hidden]))
return self.sess.run(self.reconstruction, feed_dict={self.z: hidden})
def reconstruct(self, X):
return self.sess.run(self.reconstruction, feed_dict={self.x: X})
def getWeights(self):
return self.sess.run(self.weights['w1'])
def getBiases(self):
return self.sess.run(self.weights['b1'])