cartographer_ros的submap获取与保存
cartographer:occupancy_grid_node_main
- cartographeroccupancy_grid_node_main
-
- 子图介绍
- 地图格式
- 保存子图
- 子图加载
-
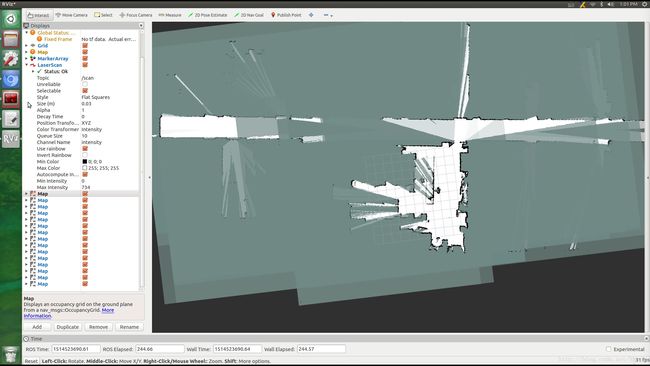
本文分析cartographer 使用二维激光传感器的SLAM, google cartographer的地图生成在occupancy_grid_node_main中实现。先放上生成的地图,走廊约为90m*60m 。左边的range_data_inserter中的insert_free_space = true,右边false。表示是否更新raytracy中的free栅格的概率。


系统简介
1. 系统采用local和global的方法来优化位姿 ξ=(ξx,ξy,ξz) ; 在local的方法中,每一帧与submap匹配;使用的是非线性优化将激光和地图对齐。因为在扫描匹配的过程中会累计误差,因此需要全局的方法来回环消除误差。
2. 在local的匹配中,采用的是类似hector_slam的线性插值的方式,不过为了解决双线性插值的不连续性,采用了双三线性插值; 在global的方法中借鉴了olson的相关性扫描匹配方式,通过全局位姿优化来解决误差累计。
3. 在子图构建完成(已经加入足够的激光数据帧), 会用来做loop closure,当激光现在的位姿估计和之前的子图足够近的时候(再次访问一个地图),在搜索窗口内,完成类似与olson的相关性扫描匹配,如果匹配结构很好就增加loop closing constraint 。
子图介绍
首先分析的是输出的地图,由次来分析采用的算法结构。这个ROS节点的任务是接受cartographer_node节点运行计算得到的子图序列和子图内容,拼接成一个大的地图的工作。如下图所示:上面的栅格地图是cartographer得到的整体的地图,下面的两张是其中两个子图对应的栅格地图。
occupancy_grid_node_main中维护的全局地图数据:
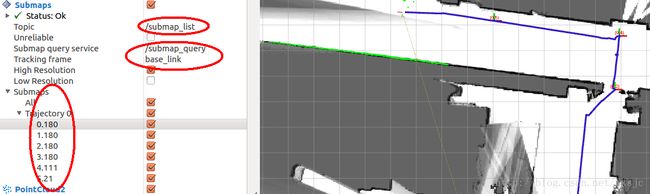
std::map在构造函数中,地图的生成需要子图序列之间的关系,以及每个子图的数据。订阅子图服务的client_和子图序列的话题关系的submap_list_subscriber_
client_(node_handle_.serviceClient<::cartographer_ros_msgs::SubmapQuery>(kSubmapQueryServiceName)),
submap_list_subscriber_(node_handle_.subscribe(kSubmapListTopic, kLatestOnlyPublisherQueueSize,
boost::function<void(const cartographer_ros_msgs::SubmapList::ConstPtr&)>(
[this](const cartographer_ros_msgs::SubmapList::ConstPtr& msg) {HandleSubmapList(msg);}))),
occupancy_grid_publisher_(node_handle_.advertise<::nav_msgs::OccupancyGrid>(
kOccupancyGridTopic, kLatestOnlyPublisherQueueSize,true /* latched */)),
occupancy_grid_publisher_timer_(node_handle_.createWallTimer(
::ros::WallDuration(publish_period_sec),&Node::DrawAndPublish, this)) {}子图序列如下,可以看出子图序列包含所有子图在map坐标系下的位姿,已经完成构建的子图,不再改变submap_version的值也不改变了submap_version:180。如下图中Trajectory 0: 0.180 1.180……,表示0轨迹下的子图。每一次激光数据到达的时候会修改最新的两个子图,例如:submap_index的33和34的submap_version的还会继续更新,直到submap_index为33的地图不再修改而增添新的子图。在序列中也能看出子图的角度也有变化。


子图序列的主题回调函数的任务是将子图的数据存入到submap_slices_。首先判断每个子图的submap_version是否不再更新,当子图存在且内容不再变化,只改变子图在map坐标系下的位姿:submap_slice.pose=ToRigid3d(submap_msg.pose)
关于ActiveSubmaps代码中的注释是这样说的,除了地图在初始化的时候,只有一个子图。其它的时刻,数据都有两个子图插入,一个old submap和一个new submap。 然后当确定数量的数据帧加入后,old submap不再变化,new submap开始初始化。这个时候new submap完成初始化变成old submap,用来完成scan-to-map匹配,也会生成一个new submap。 也就是说有个新老交替的过程用来对接scan-to-map匹配。
在cartographer_ros/cartographer_ros/submap.cc中,使用了FastGunzipString可以看出子图的数据被压缩了,数据量大的情况下是应该的。
auto response = ::cartographer::common::make_unique();
response->version = srv.response.submap_version;
for (const auto& texture : srv.response.textures) {
std::string compressed_cells(texture.cells.begin(), texture.cells.end());
std::string cells;
::cartographer::common::FastGunzipString(compressed_cells, &cells);
const int num_pixels = texture.width * texture.height;
CHECK_EQ(cells.size(), 2 * num_pixels);
…………………………………………………………………………………………………………………………………………
}
response->textures.emplace_back(
SubmapTexture{intensity, alpha, texture.width, texture.height,
texture.resolution, ToRigid3d(texture.slice_pose)}); 解压的函数如下,完成数据的SubmapTexture数据的解压缩。
inline void FastGunzipString(const string& compressed, string* decompressed) {
boost::iostreams::filtering_ostream out;
out.push(boost::iostreams::gzip_decompressor());
out.push(boost::iostreams::back_inserter(*decompressed));
boost::iostreams::write(out, reinterpret_cast<const char*>(compressed.data()),
compressed.size());
}map主题的发布由定时器设定,执行DrawAndPublish,在这个过程中,首先获得由submap_slices_子图组成的整体地图:auto painted_slices=PaintSubmapSlices(&submap_slices_,resolution_);然后发布出去Node::PublishOccupancyGrid。
地图格式
在这个过程中,我们可以单独的获取到每一个子图。每一个子图都是在统一的map坐标系下。如下图,我发布了三个子图的topic:map0,map3,map10。黑色是0表示unknown,白色是254表示free,63表示occupied,其它的在63–>200之间吧。因此在这里分析一下ROS中的地图的数据格式:nav_msgs::OccupancyGrid
std_msgs/Header header ##
nav_msgs/MapMetaData info ## width,height,resolution,origin
int8[] data ## 行须优先,以(0,0)左上为origin开始,概率在[0,100],未知为-1
如下:左边为数据存在int8[] data中的index,右边是对应的map坐标系下的坐标。(0,0)为origin
因此递推,可以得到其余各个栅格点的数据。
0 1 2 3 4 (0,0) (0,1) (0,2) (0,3)
5 6 7 8 9 (1,0) (1,1) (1,2) (1,3)
……………………… …………………………………………………………在使用rosrun map_server map_saver -f filename的时候,执行如下的代码,注意这里保存地图的时候坐标系发生了变换,以左下为origin;ROS map_server,因此可以知道在保存地图的时候做了一次上下对调。使得
for(unsigned int y = 0; y < map->info.height; y++) {
for(unsigned int x = 0; x < map->info.width; x++) {
unsigned int i = x + (map->info.height - y - 1) * map->info.width;
int pixel = (double)(100.0-map->data[i]) *2.54;
fputc(pixel, out);
}
}
如下:地图的origin为左下,可递推得到每一栅格的位置
……………………… …………………………………………………………
5 6 7 8 9 (1,0) (1,1) (1,2) (1,3)
0 1 2 3 4 (0,0) (0,1) (0,2) (0,3)之后在rosrun map_server map_server filename.yaml加载栅格地图的时候,为了还原到之前topic的数据格式,需要将坐标系再次变换,变换为nav_msgs::OccupancyGrid的格式。因此在其代码image_loader.cpp中:
for(j = 0; j < resp->map.info.height; j++)……
for (i = 0; i < resp->map.info.width; i++)……
resp->map.data[MAP_IDX(resp->map.info.width,i,resp->map.info.height - j - 1)] = value;
#define MAP_IDX(sx, i, j) ((sx) * (j) + (i))然后将子图对应的栅格数据转换成sensor_msgs::PointCloud2类型的cloud数据发布出来,如右下图的彩色点云,点云的参考坐标系为map,这样做是为了将栅格地图转换成点云,同时在RVIZ中观察转换的正确性。此时是按照nav_msgs::OccupancyGrid的数据格式了,因此栅格转换成点云的计算如下:
for(c=0;cint y = c / map_resp_.map.info.width;
int x = c - y * map_resp_.map.info.width;
double xx = origin[0] + x * res;
double yy = origin[1] + y * res; 在下面的RVIZ中的显示得到了验证

修改使用rosrun map_server map_server加载各个子图,为了保证能够正常加载,需要将不同的子图的topic作为参数传入,保证topic的frame_id是统一的即可。子图放在一起如下:

保存子图
在cartographer中一旦子图生成,子图内的数据目前不会发生改变,那么怎么保存子图的数据?我在occupancy_grid_node_main中加入了一个服务rosservice call /getsubmap index来完成这个任务。
1. 使用srv文件来完成服务的使用,在cartographer_ros/cartographer_ros_msgs/srv/中添加GetSubmap.srv,如下:
# Get the map as a nav_msgs/OccupancyGrid
int32 submap_index
bool write_map
---
nav_msgs/OccupancyGrid map在对应的CMakeLists.txt中加入对nav_msgs的依赖,因为使用了nav_msgs/OccupancyGird,包括package.xml中
2. 在occupancy_grid_node_main中加入advertiseService,对应的服务定义和回调函数:
submap_service_(node_handle_.advertiseService("getsubmap",&Node::submapCallback,this));//回调函数如下
bool Node::submapCallback(cartographer_ros_msgs::GetSubmap::Request &req,
cartographer_ros_msgs::GetSubmap::Response &res){
int submap_index = req.submap_index;
auto painted_slices = PaintSubmapSlices(&submap_slices_, resolution_,submap_index);
nav_msgs::OccupancyGrid occupancy_grid;
cairo_surface_t *surface = painted_slices.surface.get();
Eigen::Array2f& origin=painted_slices.origin;
const int width = cairo_image_surface_get_width(surface);
const int height = cairo_image_surface_get_height(surface);
occupancy_grid.header.stamp = ros::Time::now();
occupancy_grid.header.frame_id = "map"; //所有的子图都要在统一的坐标系下表示
occupancy_grid.info.map_load_time = ros::Time::now();
occupancy_grid.info.resolution = resolution_;
……………………………………………………………………………………………………………………
const uint32_t* pixel_data = reinterpret_cast(cairo_image_surface_get_data(surface));
occupancy_grid.data.reserve(width * height);
for (int y = height - 1; y >= 0; --y) {
for (int x = 0; x < width; ++x) {
const uint32_t packed = pixel_data[y * width + x];
const unsigned char color = packed >> 16;
const unsigned char observed = packed >> 8;
const int value = observed == 0 ? -1
: ::cartographer::common::RoundToInt((1. - color / 255.) * 100.);
CHECK_LE(-1, value); CHECK_GE(100, value);
occupancy_grid.data.push_back(value);
}
}
res.map=occupancy_grid;
if(true) { // 默认一直执行保存地图
std::string mapname_ ="map" ;
mapname_.append(boost::lexical_cast<std::string>(submap_index));
ROS_INFO("Received a %d X %d map @ %.3f m/pix", width,height,resolution_);
std::string mapdatafile = mapname_ + ".pgm";
ROS_INFO("Writing map occupancy data to %s", mapdatafile.c_str());
FILE* out = fopen(mapdatafile.c_str(), "w");
if (!out){
ROS_ERROR("Couldn't save map file to %s", mapdatafile.c_str());
return false;
}
fprintf(out, "P5\n# CREATOR: Map_generator.cpp %.3f m/pix\n%d %d\n255\n",resolution_,width,height);
// 参考ROS 的map_server保存地图
……………………………………………………………………………………………………………………
}
return true;
} 同时知道的是if (occupancy_grid_publisher_.getNumSubscribers() == 0) {return;},因此需要订阅map主题。
3. 修改cartographer/cartographer/io/submap_painter.h(.cpp)中的PaintSubmapSlices函数,增加index用来传递对应的submap_index。以及这个函数调用的需要index参数的函数。
PaintSubmapSlicesResult PaintSubmapSlices(
std::map<::cartographer::mapping::SubmapId, SubmapSlice>* submaps,
const double resolution,int index);子图加载
在bash中加载所有的子图:
#!/bin/bash
source /home/robot/tempRos_ws/devel/setup.bash
for ((i=0;i<16;i++))
do
echo $i
# map_file="/home/robot/Documents/submapPgm/used_submap/map${i}.yaml"
# echo ${map_file}
# mapTopic="map${i}"
rosrun map_server map_server "/home/robot/Documents/submapPgm/used_submap/map${i}.yaml" "map${i}" &
done