数值优化(Numerical Optimization)学习系列-信赖域方法
信赖域方法和线搜索类似都是迭代方法,与其不同的是,每次迭代时,在一个选定的可信赖区域内,选择当前迭代点的近似模型 mk ,然后计算最优步长;如果步长不合适,可以对区域进行缩放。该小结主要介绍:
- 信赖域方法的基本形式
- 求解信赖域的基础方法
- 信赖域方法的收敛性和收敛速度
- 信赖域方法的扩展
信赖域方法的基本形式
在信赖域方法中,可信赖的区域(Region)的选择很重要,一般都会根据上一步结果进行动态变化;如果上一步太大则缩小,否则进行扩大。
在模型最优化问题中,选择TR方法比LS方法能够较快的收敛,例如
在该例子中,在非凸函数F中,当前步骤TR方法要优于LS。
信赖域方法有几个参数需要选择:
1. 近似模型 mk
2. 可信赖区域 Δk
3. 求解参数 pk
基本形式
在本节中模型选择为二次近似模型,采用函数二阶泰勒展开,即
信赖域的基本形式为:
该问题为关于p的带约束的最优化问题,参数p被限制在一个球形区域内。如果 Bk 选择为Hessian,则为TR的牛顿方法。
如果 ||B−1kgk||≤Δk 则 pk=−B−1kgk 为 完全步(Full Step),即球形约束没有作用。
Δk 的选择
参数 Δk 的选择一般会根据上一步的结果进行调整,定义
1. 如果 ρk 小于0,一般情况下分母不可能小于0,因为目标函数求解的是最小值;此时说明分子小于0,即下一个目标点比上一步大,此时需要舍弃。
2. 如果 ρk 大于0并且接近1,说明模型和实际的预期比较相符合,此时可以考虑扩大 Δk
3. 如果 ρk 大于0但是明显小于1,此时可以不用调整
4. 如果 ρk 大于0,但是接近0,说明模型变化范围比较大,但是实际改变比较小,此时应该收缩或者减少 Δk
具体算法如下:

子问题的最优解
为简化形式,将信赖域问题的子问题表示为:
该问题为标准的带不等式约束的二次优化问题,可以根据KKT条件(后面会深入介绍)得到该问题的最优解
定理
如果向量 p∗ 为子问题的最优解,当且仅当满足 p∗ 为可行解,并且存在标量 λ 满足
其中条件(b)为补充条件,即要么 λ为0要么Δ=||p∗|| 。
从下图中可以看出最优解和参数 λ 的关系

当参数 Δ=Δ1 时,最优解为 p3 此时相当于没有约束,此时 λ=0
当参数 Δ=Δ1或者Δ2 时,最优解被球形约束限制,此时满足 Δ=||p∗|| ,根据上面条件(a)有
如果能够找到这样的p满足这些条件就能找到最优解。
基于柯西点(Cauchy-Point)的算法
在实际求解过程中不一定找到最优解,而是找到一个充分下降的点满足全局收敛即可。柯西点就是满足该条件的点( pck )
柯西点(Caychy-Point)算法
求解步骤如下
1. 计算原子问题的线性蜕化问题,寻找向量 psk 满足
2. 寻找标量 τk>0 满足 min mk(τpsk) 同时满足信赖域的约束,即
3. pck=τkpsk
分别解释如下:
1. 计算 psk 从上述步骤1中可以看出求解步骤1有必使解, psk=−Δk||gk||gk 。两种思路,一是退化后的函数为线性函数,而且是递减的,只要取下界即可。二是利用KKT条件也可以推出。
2. 将求解得到的 psk 代入子问题可以得到,
1) gTkBkgk≤0 ,是一个关于 τ 的递减函数,直接得到 τ=1
2)如果 gTkBkgk>0 求导可以得到 τk=||gk||3ΔkgTkBkgk,同时τ需要满足τ\e1
柯西点很容易计算,但是如果只利用柯西点,相当于只利用了梯度方向,相当于线搜索的扩展而已,即收敛速度为线性收敛。
Dogleg算法
该方法适用于当 Bk正定时 ,寻找半径 Δ 和最优解 p∗(Δ) 之间的关系。
在之前定义了完全步(Full Step),即 ||B−1kgk||≤Δk 则 pBk=−B−1kgk
该算法的思路为, p∗(Δ) 表示不同 Δ 条件下的最优解,
1) p∗(Δ)=pB||pB||≤Δ ,否则
2)
此为Dogleg方法,即寻找一个折线即两个线段的交点,即一条线段是沿着负梯度方向的最优值;二是沿着 pU到pB 方向。在此折线上寻找最优解。
由定理可以证明 ||p(τ)||是一个关于τ的递增函数,而m(p(τ))是一个关于τ的递减函数 ,又是一个线性函数,因此只要计算 p(τ)和||p||=Δ 的交点即可。从下图可以清晰看到

二维子空间最优化
在DogLeg算法中,可以理解为最优解 p∗ 可以表示为 pU和pB的扩展子空间,即p∗=λ1g+λ2B−1g ,则原子问题可以表示为:
迭代算法
根据子问题的最优解形式可以得到
1)当 λ=0时 需要满足
2) 当 λ≠0时 需要满足
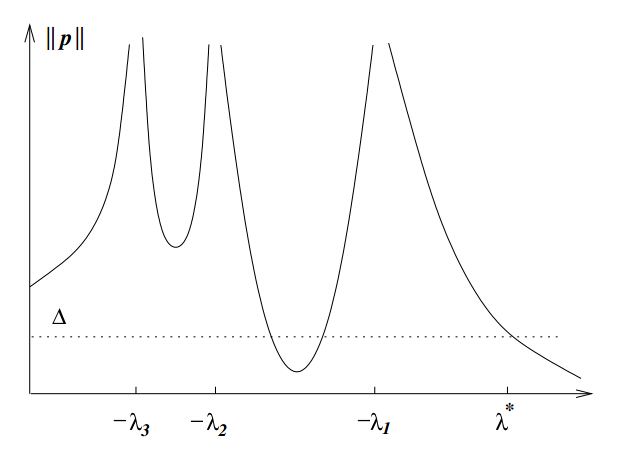
通过定义 p(λ)=−(B+λI)−1g ,寻找特定的 λ使得||p(λ)||=Δ
相关定义
由于B正定因此可以进行正交分解, B=QΛQT; Λ=diag(λ1,λ2,...,λn)并且λ1≤λ2≤...≤λn
迭代算法
1)由上述定义
2) 当 λ>−λ1时 函数值是一个单调递减函数,特别当 limλ→∞(p(λ)2)→0
3)因此我们需要寻找 λ∈(−∞,λ1)使得||p||=Δ
λ 求解
在 qTig≠0
1)通过牛顿迭代法求解
2)近似算法求解
当 qTig=0 是一个Hard Case,此时可以添加一个误差因子进行近似
信赖域的其他扩展
- poor scaling问题,可以扩展为球形或者椭圆形
- 可以构造Scaled的算法
min m(p)=f+gTp+12pTBps.t ||Dp||≤Δ
- 矩阵D的构造和 ∂2f/∂xi 相关
- 可以构造通用的柯西点废
- 其他Norm方法,例如
||p||1≤Δ||p||∞≤Δ
总结
通过该节需要了解
1. 信赖域方法和线搜索方法的不同
2. 信赖域方法的基本形式
3. 信赖域方法的柯西点算法、DogLeg算法和最优解迭代算法
4. 信赖域方法收敛