【ROS】ROS安装过程与笔记
根据roswiki官网安装流程排列所遇到的问题,看目录可以快速定位。给没接触过Linux的同学提供安装ROS碰到的问题。
Ubuntu16.04官网kinetic安装教程 http://wiki.ros.org/cn/kinetic/Installation/Ubuntu
Ubuntu14.04安装indigo则只需要把下面命令中的kinetic替换成indigo即可
1.Roswiki_1.2sudo su获取权限时无法输入密码
Q:sudo时要输入密码,但是输不进去怎么办?
A:输入密码时命令行无变化,打完密码回车即可。
--------------------------------
root权限问题
$sudo //sudo 是ubuntu取得root权限的命令,输入则会让用户输入密码
---------------------------------
2. Roswiki_1.2添加 sources.list
2.1添加源
Q:命令粘贴上去后输入password没反应
A:输入密码的时候终端无变化 验证是否变化过程可以手动查看命令作用的对象有无变化
$sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
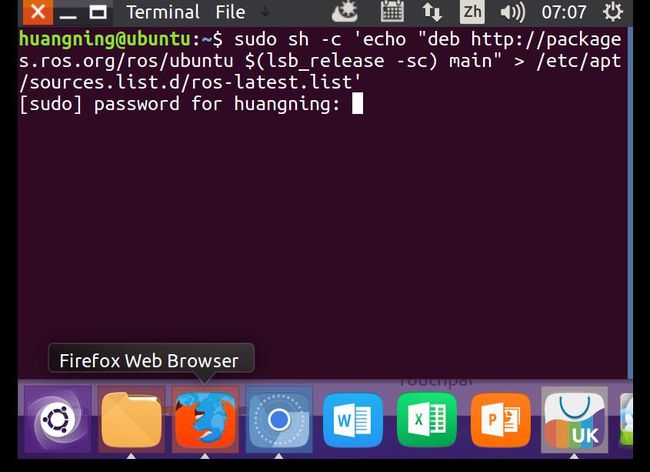
->
以我终端的为例子
$sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
命令作用: 将deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main
输入到 /etc/apt/sources.list.d/ros-latest.list文件
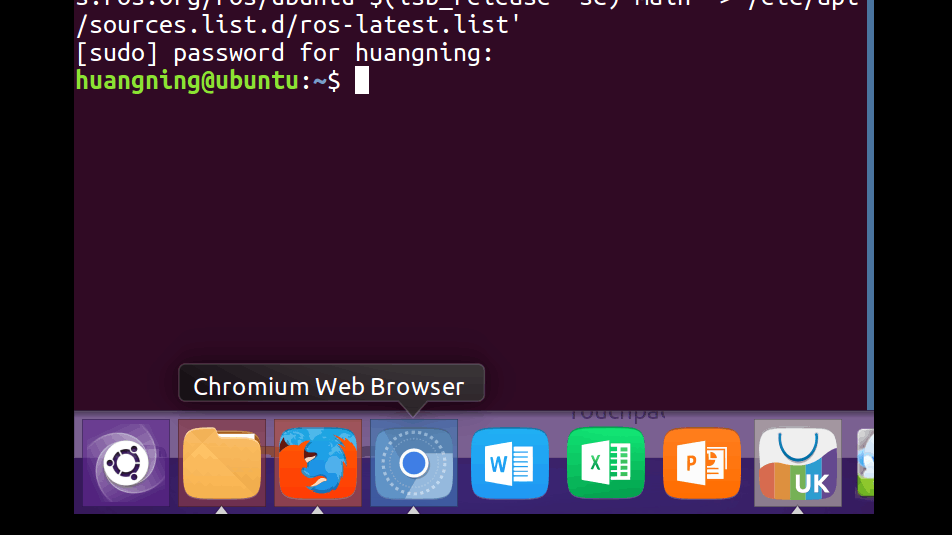
跟上面那张图一样。没错,实际到了这步就ok了。命令已写入。 我们在初步学习ROS系统时的写入命令,终端没有回应的。
验证

有基础的同学可以直接cd切换路径查看。
2.2不能取得根用户权限
Q:sudo: unable to change to root gid: Operation not permitted
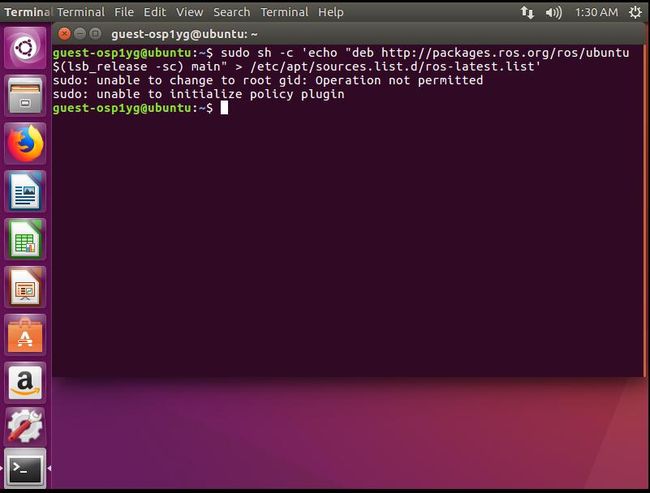
A:百度错误输出sudo: unable to change to root gid: Operation not permitted,解决办法一下子就能找到,并且十分详细。
因为输入密码进入系统时进入了Guest客人会话组,当然取得不了权限
Linux系统有guest用户角色,在这个用户角色不能直接取得root权限。
Roswiki_1.3添加 keys
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
3.Roswiki_1.4安装
更新软件包索引
sudo apt-get update
在Ubuntu16.04安装kinetic ros
sudo apt-get install ros-kinetic-desktop-full
如果在是Ubuntu14.04安装indigo则是
sudo apt-get install ros-indigo-desktop-full
Q:一直处在正在设置阶段
A: 1.结束标志在于输入光标出来,如下图最后一行。
2.这个阶段类似于Window系统的安装exe。当然Window的视窗系统更加人性化。

4.Roswiki_1.5
sudo rosdep init
rosdep update
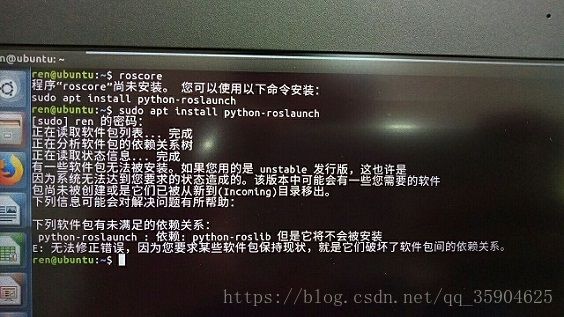
4.1未满足依赖
这个问题出现在1.5初始化开始的某项流程没有做导致这个问题产生。
Q: E:未满足依赖关系 详细的命令行输出错误信息在下图。
A: 卸载与重装依赖包。
Linux依赖。不在这详细解释。
4.2 sudo rosdep init :引出当出错时纠错方法
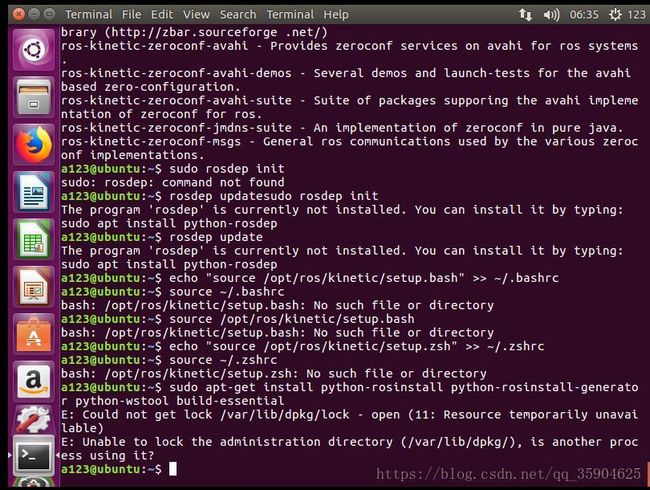
1比如图里a123@ubuntu的第二条第三条命令输出了解决办法sudo apt install python-rosdep。虽然第二条命令打错了,rosdep updatesudo rosdep init本是rosdep update sudo rosdep两条命令 ,
但是并没有妨碍输出解决线索You can install it by typing:sudo apt install python-rosdep。
之后的错误源自于上一步没做完。2然后第五条命令输出了No such file or directory。这是因为sudo rosdep没初始化,没有产生文档写入自己的命令。
再联系dpkg容易得出apt进程在所有终端之中只能运行一个。则关闭其他apt进程即可
5.Roswiki_1.6环境配置
注意Ubuntu14.04的命令将kinetic替换成indigo
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc source ~/.bashrc
命令的作用
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
该命令将"source /opt/ros/kinetic/setup.bash" 字符串输入到~/.bashrc文件。所以当没有该文件时 No such file or directory。相信indigo的同学知道该命令中indigo的路径怎么改了。
ctrl+H 在主文件夹的视窗系统查看隐藏文件。可看到./bashrc文件。
ubuntu可以用
sudo gedit ~/.bashrc root权限下使用文本编辑器打开查看检查命令有没有写入。
1.7依赖安装基本没问题,所以不单独列标题
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
6.Roswiki_2.1安装并配置环境
2.配置环境
http://wiki.ros.org/cn/ROS/Tutorials/InstallingandConfiguringROSEnvironment
简单提炼几个要点。
2.1修改红字为自己版本
source /opt/ros/indigo或者kinetic/setup.bash
2.2创建ROS工作空间
按如下命令输入终端,即可。“~”也是一个路径。
如下命令
创建文件夹,
切换目录并编译目录,
更改终端环境变量,
输出ROS_PACKAGE_PATH参数检查路径参数。
$ mkdir -p ~/catkin_ws/src $ cd ~/catkin_ws/src
$ cd ~/catkin_ws/ $ catkin_make
$ source devel/setup.bash
$ echo $ROS_PACKAGE_PATH