无人驾驶感知概述

概述
在移动机器人行业,无人驾驶技术逐步兴起,并且广泛应用于公共交通、快递用车、工业应用、生活出行等方面。有专家预计,2021年无人车将进入市场,世界经济论坛估计汽车行业的数字化变革将创造670亿美元的价值,带来3.1万亿美元的社会效益,然后到2040年将实现全部汽车转化为无人驾驶。对于小白来说,脑海里可能没有具体的无人驾驶概念,那么接下来就从问题出发逐步引入。
无人驾驶是怎么定义的呢?
早在2013年的时候,美国国家公路交通安全管理局就曾发布了汽车自动化的五级标准,分为Level 0(无自动化)、Level 1(单一功能自动化)、Level 2(部分自动化)、Level 3(有条件自动化)、Level 4(完全自动化),其中Level 4就是无人驾驶的形态。
为什么要发展无人驾驶呢?
据统计,美国机动车事故中94%与人为失误有关,城区30%的交通拥堵是由于司机寻找附近停车场而不断在商务区绕圈导致的,故发展无人驾驶技术将会增强高速公路的安全性,缓解交通拥堵,疏解停车难问题,降低空气污染。
无人驾驶需要哪些技术?
从系统层面看,无人驾驶主要包括用户端、算法、云端三部分。在用户端,包括机器人操作系统及硬件;在算法部分,包括三个方向:传感、感知、决策;在云端,主要进行高精地图的绘制、数据存储、深度学习模型训练等;最终,构建适用于无人驾驶的边缘计算(将服务由中心节点分散到边缘节点处理,减少延迟)系统。
无人驾驶目前面临什么问题?
目前无人驾驶在技术上面临着恶劣天气、数据保护、信号延迟、基础设施不齐全的问题,道德法律上面临着事故追责、行车立法的问题。
传感器
通常,无人车装备有各种不同类型的传感器。因传感器各有优劣,需要进行融合使用。其中,常用的传感器有:
(1)GPS/IMU

GPS是基于三角测量法定位,一般通过三颗卫星分别测出距离,然后取以三颗卫星为圆心、距离为半径的圆的交点,然后用第四颗卫星作确认;但是距离测量也存在卫星钟误差与传播延迟导致的误差问题,利用差分技术可以消除或者减少该误差,原理是两个距离接近的GPS接收机接收的GPS信号通过几乎同一块大气区域,具有相似的误差,只要标定求出其中一个接收机的误差就可以纠正另一个接收机的GPS测量数据。
IMU是测量加速度、旋转运动的传感器,包括加速度计、角速度计。由于制作工艺的原因,IMU测量数据通常有一定误差,第一种误差是偏移误差,陀螺仪与加速度计没有变化的时候也会有非零输出;第二种误差是比例误差,所测量的输出与被检测的输入之间的比率;第三种是背景白噪声。
GPS可以提供相对准确的位置但是更新频率仅有10Hz,IMU可以提供200Hz的更新频率但是存在长时间的累积飘移,两者整合使用提供准确的200Hz频率的位置更新数据。
GPS/IMU组合虽然准确实时,但是定位精度仅在1米之内,而且GPS信号存在多路径问题(容易导致几十厘米甚至几米的误差),同时GPS仅适用于非封闭环境。
(2)LiDAR(激光雷达)



LiDAR作为无人驾驶的主传感器,拥有厘米级的精准度,通过激光(多为950nm波段附近的红外光)反射测出与物体的距离,得到坐标与强度信息,可以用来产生高精地图,以及针对高精地图定位。
在无人驾驶应用中,LiDAR主要有多线扫描低分辨率(以velodyne为代表,横向角度分辨率非常高,但是纵向分辨率较低)、高分辨率近距离(以Flash为代表,使用面阵型光电探测器,点云分辨率横向与纵向均匀分布并可能达到几百甚至上千像素级别,但是探测距离和测距的精确度较低、可测物体反射率的动态范围较小)、高分辨率图像级长距(以Innovusion Cheetah为代表)三种类型。
LiDAR面临的挑战主要是空气中的悬浮物、计算量、造价昂贵。
(3)Camera

Camera主要用于物体识别、追踪场景,以60Hz的频率工作,但是数据量通常很大,而且受限于光照条件。
(4)雷达与声纳


毫米波雷达通过发射无线电信号(毫米波波段的电磁波)并接收反射信号感知周围环境,不受天气状况限制。
声纳的主要功能是避障。
感知
无人驾驶的感知主要包括环境感知、自我感知两个方面,即建图与定位。
环境感知
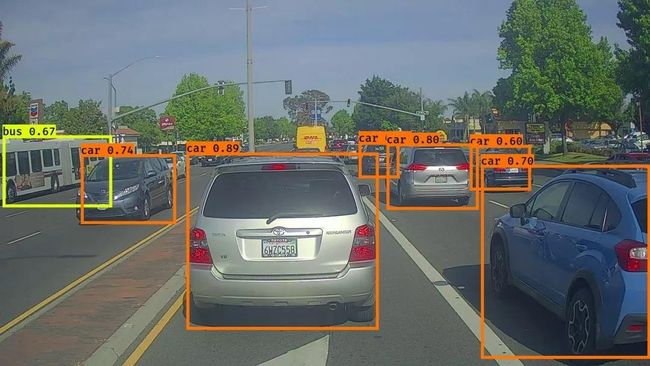
环境感知主要包括物体识别、物体追踪,识别行驶途中遇到的路标、行人、车辆等物体,跟踪动态物体达到防止碰撞的目的。随着近些年深度学习技术的发展,通过深度学习的方法可以显著提高识别、追踪的效果,相比于传统的计算机视觉技术有很大优势。
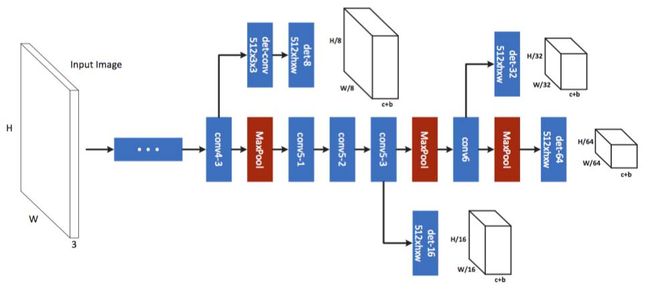
卷积神经网络 (CNN)是一类在物体识别中广泛运用的深度神经网络,主要包括四个阶段:卷积层使用不同滤波器提取图像的特征,并在训练之后抽取“可学习”的参数;激活层决定是否启动目标神经元;汇聚层压缩特征映射图的所占空间减少参数数目,降低计算量;一旦物体被识别出来,将自动预测运行轨迹或进行追踪。
自我感知
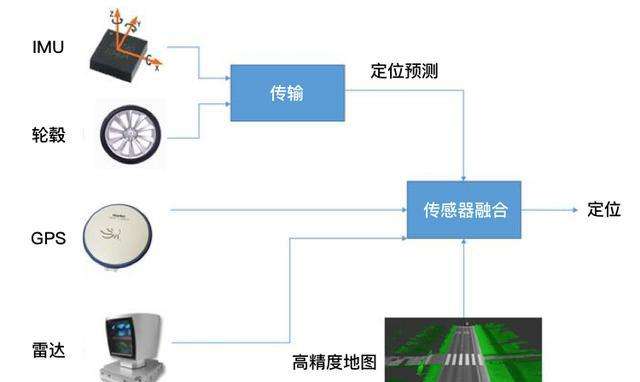
通过传感器、里程计算法,无人车可以感知自身的位置状态,满足自主导航的需求。由于多种传感器的特性互补,使用卡尔曼滤波器融合数据,可以达到准确定位的要求。
卡尔曼滤波器,可以从一组有噪声的对物体位置的观察数据中,提取出对物体位置坐标、速度的预测。一般分为两个阶段,预测阶段通过上个时间点的位置信息预测当前的位置信息,更新阶段通过对物体位置的观测纠正位置预测更新物体位置。例如IMU与GPS融合,通过在上次位置估算的基础上使用IMU对当前位置进行实时预测(积分处理),接收到GPS数据后对当前位置预测进行更新,以此类推。
最后来个总结,本文主要对无人驾驶以及感知部分作简单的介绍,包括无人驾驶概述、传感器、感知,有助于快速了解无人驾驶感知部分的知识结构。
参考资料
[1]. 刘少山 等.第一本无人驾驶技术书(第2版)[M].电子工业出版社:北京,2019.
[2]. 无人驾驶数据集汇总