darknet_ros检测自己的图片
文章目录
- darknet_ros检测自己的图片
- 文件结构
- darknet_ros
- 运行detecting_test
- 源代码
- 修改说明
- 运行程序
darknet_ros检测自己的图片
因为是要做毕业设计的原因,所以需要修改darknet_ros(以下简称darknet)的源代码。因此记录下所学到的一些东西。关于darknet_ros的运行配置问题,可以参考上一篇博客。
文件结构
首先对catkin当中的文件结构进行一些说明。以我目前运用的文件结构举例,下面的图片就是我的catkin中的文件,具体说明如下
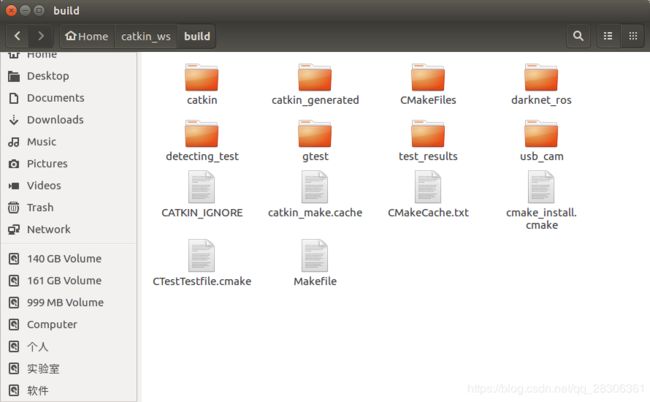
build
build是编译生成出的一些中间文件,可以看到不同的包都编译出对应的东西
devel
devel是develop的缩写,里面比较重要的就是lib文件夹,如果你写了一个node节点,这里面就会出现相应的菱形一样的东西,例如我的detecting_test这个package下面就有image_publisher和image_subscriber两个节点,就会生成两个这样的文件。

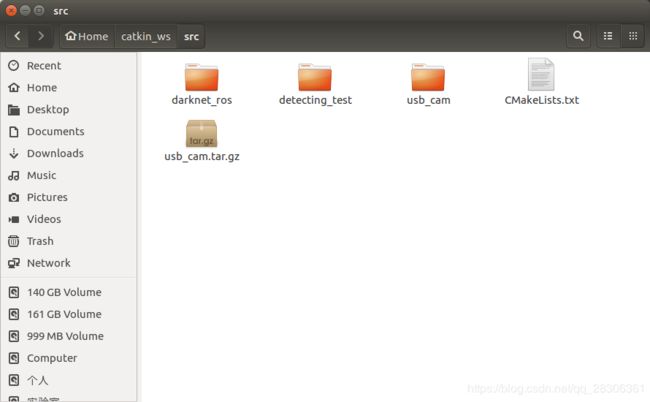
src
src就不用说了,存放的是源文件,也是我们研究的重点,我的src下面有三个package,如下图所示
其中的节点在roboware中如下所示:

重点看一下darknet_ros文件夹
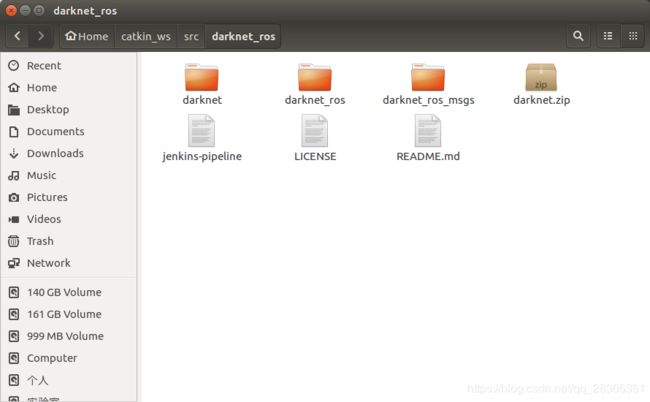
darknet文件夹里面是关于darknet的一些文件,darknet_ros就是关于在ros中使用darknet编写的一些文件,darknet_ros_msgs就是一些关于message或者action的定义文件。
darknet_ros
重点看darknet_ros文件夹

config 配置文件,重要,里面存放的就是各种yaml文件
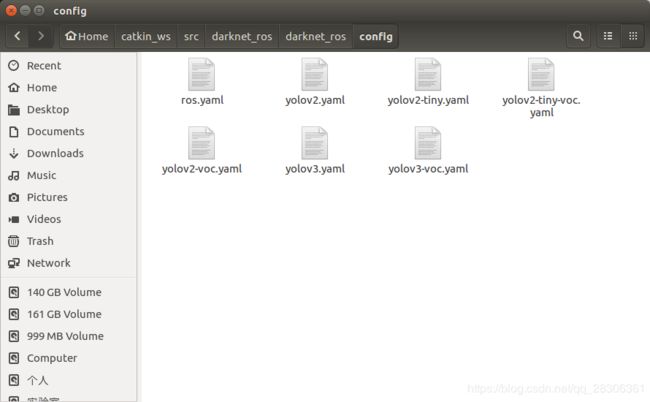
在这里可以很方面地查看作者定义的topic,例如ros.yaml文件如下
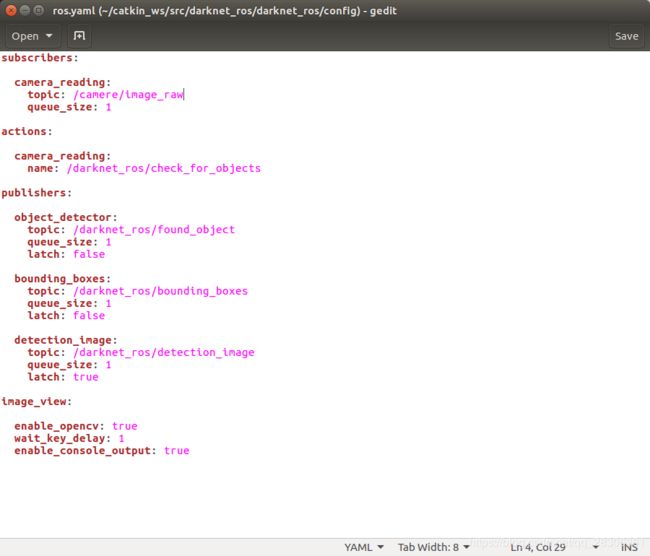
你可以修改或者利用这里的话题,进行自己相应的开发。例如,在当初运行darknet_ros的时候,我想从摄像头读取图片,就应该将camera_reading的topic改为usb_cam/image_raw
doc 存放的是用来检测的图片
include 存放的包含的头文件
launch 存放launch文件,有3个launch文件,可以通过roslaunch命令运行
src 源程序,主要是darknet与ros的接口实现
test 用来测试的程序,这里还没弄明白应该怎么运行
yolo_network_config 网络配置文件,其中的cfg文件夹中存放了各种网络设置的超参数,以及网络的结构,weights文件夹中存放的是已经训练好的网络模型,想要运行程序必须先把网络模型下载好
运行detecting_test
网上的教程一般是没有说明这一块文件是怎么运行的。具体操作如下
源代码
为了运行这个package,我修改了其中的源代码
image_publisher.cpp
/**************************************************************************
* @author z.h
* @date 2019.1.4
* @usage:image_publisher.cpp
* @brief:@params[IN]:@return:
**************************************************************************/
#include
#include
#include
#include
int main(int argc, char *argv[])
{
ros::init(argc, argv, "image_publisher");
ros::NodeHandle nh;
image_transport::ImageTransport it(nh);
image_transport::Publisher pub = it.advertise("/camere/image_raw", 1);
cv::Mat image = cv::imread("/home/vlt/Downloads/1.jpg", CV_LOAD_IMAGE_COLOR);
sensor_msgs::ImagePtr msg = cv_bridge::CvImage(std_msgs::Header(), "bgr8",image).toImageMsg();
ros::Rate loop_rate(5);
while (nh.ok()) {
pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
image_subscriber.cpp
/**************************************************************************
* @author z.h
* @date 2019.1.4
* @usage:image_subscribe.cpp
* @brief:@params[IN]:@return:
**************************************************************************/
#include
#include
#include
#include
void imageCallback(const sensor_msgs::ImageConstPtr& msg)
{
try
{
cv::imshow("view", cv_bridge::toCvShare(msg, "bgr8")->image);
cv::imwrite("/home/vlt/catkin_ws/src/detecting_test/data/results.jpg", cv_bridge::toCvShare(msg, "bgr8")->image);
cv::waitKey(10);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("Could not convert from '%s' to 'bgr8'.", msg->encoding.c_str());
}
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "image_subscriber");
ros::NodeHandle nh;
cv::namedWindow("view");
//cv::startWindowThread();
image_transport::ImageTransport it(nh);
image_transport::Subscriber sub = it.subscribe("/darknet_ros/detection_image", 1, imageCallback);///darknet_ros/detection_image
ros::spin();
cv::destroyWindow("view");
return 0;
}
修改说明
在image_publisher.cpp中,修改了话题的发布名称,和ros.yaml中的camera_reading的topic要一致,才能调用darknet进行检测。检测的图片就是我随便下载的一张图片,填上路径就行了。
image_transport::Publisher pub = it.advertise("/camere/image_raw", 1);
cv::Mat image = cv::imread("/home/vlt/Downloads/1.jpg", CV_LOAD_IMAGE_COLOR);
在image_subscriber.cpp,修改了检测图片的存储地址
cv::imwrite("/home/vlt/catkin_ws/src/detecting_test/data/results.jpg", cv_bridge::toCvShare(msg, "bgr8")->image);
注意订阅的话题名称要和ros.yaml中的publisher的detection_image的topic要一致,得到darknet的检测结果并进行存储
运行程序
roscore
另开一个窗口
rosrun detecting_image image_publisher
另开一个窗口
roslaunch darknet_ros darknet_ros.launch
另开一个窗口
rosrun detecting_image image_subscriber
即,我通过detecting_image的image_publisher发布图像话题“/camere/image_raw”,通过darknet_ros中的darknet_ros接收到了发布的图像并进行了检测,然后发布了另一个话题“/darknet_ros/detection_image”,然后detecting_image中的image_subscriber收到了这个话题,保存好了检测结果图片。
最终的检测结果如下图所示:
