【SLAM】视觉SLAM十四讲(三:李群与李代数)
参考https://blog.csdn.net/weixin_41074793/article/details/84853291
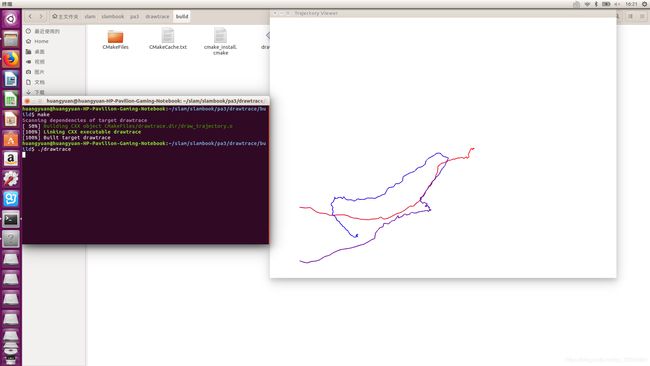
轨迹描绘
1.事实上,T W C 的平移部分即构成了机器人的轨迹。它的物理意义是什么?为何画出 T W C 的平移
部分就得到了机器人的轨迹?
坐标的变换就是Twc的平移部分,我理解的物理意义就是机器人从某一坐标移到了另一坐标,因此平移部分就是机器人的轨迹。
2. 我为你准备了一个轨迹文件(code/trajectory.txt)。该文件的每一行由若干个数据组成,格式为
[t, t x , t y , t z , q x , q y , q z , q w ],
其中 t 为时间,t x , t y , t z 为 T W C 的平移部分,q x , q y , q z , q w 是四元数表示的 T W C 的旋转部分,q w
为四元数实部。同时,我为你提供了画图程序 draw_trajectory.cpp 文件。该文件提供了画图部分
的代码,请你完成数据读取部分的代码,然后书写 CMakeLists.txt 以让此程序运行起来。注意我
们需要用到 Pangolin 库来画图,所以你需要事先安装 Pangolin(如果你做了第一次作业,那么现
在已经安装了)。CMakeLists.txt 可以参照 ORB-SLAM2 部分。
draw_trajectory.cpp
#include
#include
#include
#include
#include
#include
#include
#include
#include
// need pangolin for plotting trajectory
#include
using namespace std;
// path to trajectory file
string trajectory_file = "/home/huangyuan/slam/slambook/pa3/drawtrace/trajectory.txt";
// function for plotting trajectory, don't edit this code
// start point is red and end point is blue
void DrawTrajectory(vector>);
int main(int argc, char **argv) {
vector> poses;
/// implement pose reading code
// start your code here (5~10 lines)
//读取txt文件
// implement pose reading code
ifstream infile(trajectory_file);
double t1,tx,ty,tz,qx,qy,qz,qw;
string line;
if(infile)
{
while(getline(infile,line))
{
stringstream record(line); //从string读取数据
record>>t1>>tx>>ty>>tz>>qx>>qy>>qz>>qw;
Eigen::Vector3d t(tx,ty,tz);
Eigen::Quaterniond q = Eigen::Quaterniond(qw,qx,qy,qz).normalized(); //四元数的顺序要注意
Sophus::SE3 SE3_qt(q,t);
poses.push_back(SE3_qt);
}
}
else
{
cout<<"没找到这个文件"<> poses) {
if (poses.empty()) {
cerr << "Trajectory is empty!" << endl;
return;
}
// create pangolin window and plot the trajectory
pangolin::CreateWindowAndBind("Trajectory Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
while (pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glLineWidth(2);
for (size_t i = 0; i < poses.size() - 1; i++) {
glColor3f(1 - (float) i / poses.size(), 0.0f, (float) i / poses.size());
glBegin(GL_LINES);
auto p1 = poses[i], p2 = poses[i + 1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
pangolin::FinishFrame();
usleep(5000); // sleep 5 ms
}
}
CMakeLists.txt
PROJECT(drawtrace)
# Check C++11 or C++0x support
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX11)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
add_definitions(-DCOMPILEDWITHC11)
message(STATUS "Using flag -std=c++11.")
elseif(COMPILER_SUPPORTS_CXX0X)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
add_definitions(-DCOMPILEDWITHC0X)
message(STATUS "Using flag -std=c++0x.")
else()
message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++11 support. Please use a different C++ compiler.")
endif()
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules)
find_package(OpenCV 3.0 QUIET)
if(NOT OpenCV_FOUND)
find_package(OpenCV 2.4.3 QUIET)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 2.4.3 not found.")
endif()
endif()
find_package(Sophus)
include_directories( ${Sophus_INCLUDE_DIRS} )
# eigen
include_directories( "/usr/include/eigen3/" )
find_package(Pangolin)
include_directories( ${Pangolin_INCLUDE_DIRS} )
ADD_EXECUTABLE(drawtrace draw_trajectory.cpp)
target_link_libraries(${PROJECT_NAME}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${Sophus_LIBRARIES}
)
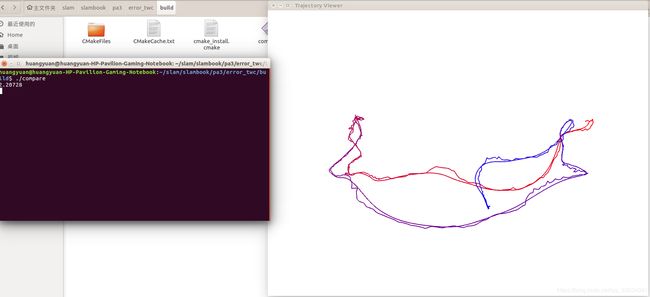
轨迹误差
CMakeLists.txt
PROJECT(compare)
# Check C++11 or C++0x support
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX11)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
add_definitions(-DCOMPILEDWITHC11)
message(STATUS "Using flag -std=c++11.")
elseif(COMPILER_SUPPORTS_CXX0X)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
add_definitions(-DCOMPILEDWITHC0X)
message(STATUS "Using flag -std=c++0x.")
else()
message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++11 support. Please use a different C++ compiler.")
endif()
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules)
find_package(OpenCV 3.0 QUIET)
if(NOT OpenCV_FOUND)
find_package(OpenCV 2.4.3 QUIET)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 2.4.3 not found.")
endif()
endif()
# sophus
find_package(Sophus)
include_directories( ${Sophus_INCLUDE_DIRS} )
# eigen
include_directories( "/usr/include/eigen3/" )
#Pangolin
find_package(Pangolin)
include_directories( ${Pangolin_INCLUDE_DIRS} )
# exe
ADD_EXECUTABLE(compare compare.cpp)
target_link_libraries(${PROJECT_NAME}
${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${Sophus_LIBRARIES}
)
compare.cpp
#include
#include
#include
#include
#include
#include
#include
#include
#include
// need pangolin for plotting trajectory
#include
using namespace std;
// path to trajectory file
string estimated_file = "/home/huangyuan/slam/slambook/pa3/drawtrace/estimated.txt";
string groundtruth_file = "/home/huangyuan/slam/slambook/pa3/drawtrace/groundtruth.txt";
vector> pose1,pose2;
// function for plotting trajectory, don't edit this code
// start point is red and end point is blue
void DrawTrajectory(vector> pose1,vector> pose2);
void readData(string filepath);
void ErrorTrajectory();
int main(int argc, char **argv) {
/// implement pose reading code
// start your code here (5~10 lines)
readData(estimated_file);
readData(groundtruth_file);
ErrorTrajectory();
// end your code here
// draw trajectory in pangolin
DrawTrajectory(pose1,pose2);
return 0;
}
/*******************************************************************************************/
void ErrorTrajectory()
{
double RMSE = 0;
Eigen::Matrix se3;
vector error;
for(int i=0;i> poses;
ifstream infile(filepath);
double t1,tx,ty,tz,qx,qy,qz,qw;
string line;
if(infile)
{
while(getline(infile,line))
{
stringstream record(line); //从string读取数据
record>>t1>>tx>>ty>>tz>>qx>>qy>>qz>>qw;
Eigen::Vector3d t(tx,ty,tz);
Eigen::Quaterniond q = Eigen::Quaterniond(qw,qx,qy,qz).normalized(); //四元数的顺序要注意
Sophus::SE3 SE3_qt(q,t);
poses.push_back(SE3_qt);
}
}
else
{
cout<<"没找到这个文件"<> pose1,vector> pose2) {
if (pose1.empty()) {
cerr << "estimated is empty!" << endl;
return;
}
if(pose2.empty()){
cerr << "groundtruth is empty!" << endl;
return;
}
// create pangolin window and plot the trajectory
pangolin::CreateWindowAndBind("Trajectory Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, pangolin::Attach::Pix(175), 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
while (pangolin::ShouldQuit() == false) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glLineWidth(2);
for (size_t i = 0; i < pose1.size() - 1; i++) {
glColor3f(1 - (float) i / pose1.size(), 0.0f, (float) i / pose1.size());
glBegin(GL_LINES);
auto p1 = pose1[i], p2 = pose1[i + 1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
for (size_t i = 0; i < pose2.size() - 1; i++) {
glColor3f(1 - (float) i / pose2.size(), 0.0f, (float) i / pose2.size());
glBegin(GL_LINES);
auto p1 = pose2[i], p2 = pose2[i + 1];
glVertex3d(p1.translation()[0], p1.translation()[1], p1.translation()[2]);
glVertex3d(p2.translation()[0], p2.translation()[1], p2.translation()[2]);
glEnd();
}
pangolin::FinishFrame();
usleep(5000); // sleep 5 ms
}
}