ORB_SLAM2+IMU详解
单目VIO学习
细节探讨:
PVR优化顶点:g2o::VertexNavStatePVR,定义在g2otypes.h中
Bias优化顶点:g2o::VertexNavStateBias
一:关于优化部分:Optimizer.cpp
1. PoseOptimization(Frame *pFrame,Frame* pLastFrame, const IMUPreintegrator& imupreint, const cv::Mat&gw, const bool& bComputeMarg)
PoseOptimization(Frame *pFrame, KeyFrame* pLastKF, constIMUPreintegrator& imupreint, const cv::Mat& gw, const bool&bComputeMarg=false)
这部分主要用在TrackWithIMU(相当于相机跟踪),TrackLocalMapWithIMU(相当于局部地图跟踪)中。跟纯视觉的优化方式相同,这里只是优化当前帧的位姿。两个方法的区别是选取的前一帧是关键帧还是一般帧。在TrackLocalMapWithIMU中,如果局部地图更新成功,就选取关键帧,如果局部地图未更新就选取一般帧。在TrackWithIMU中,局部地图初始化成功或则地图更新成功,就选取关键帧,否则选取一般帧。
(1) 首先设置帧的顶点,一共分为4个顶点,包括当前帧和前一帧PVR和Bias偏置(这里的顶点模型定义在g2otypes.h中),
(2) 然后定义上面帧顶点连接的边,如下图所示:1代表前一帧PVR和Bias之间的边,2代表前一帧PVR、Bias和当前帧PVR之间的边,3代表前一帧和当前帧Bias之间的边。
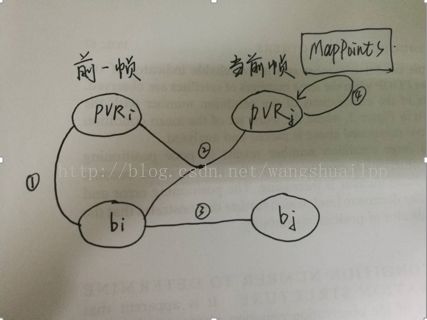
(3) 最后是设置MapPoint对应的指向当前帧位姿顶点的自己的一元边,这里和纯视觉的优化位姿是一样的,利用MapPoint的3d点和位姿关系将3d点投影到图像中,和图像中的位置作比较,这里没有定义MapPoint的顶点,只定义了当前帧的位姿顶点,因此是一个一元边,如上图中4所示,最后指向自己。
(4) 最后就是迭代优化,和纯视觉的处理方式一样
2. OptimizeInitialGyroBias
这部分主要使用在Tracking和LocalMapping中,有三种模式,分别是针对一般帧和关键帧(关键帧中分为两种参数输入,但都是调用统一函数,因此归为一类),Tracking中使用在相机跟踪和局部地图跟踪之后(使用的是20帧一般帧),LocalMapping中使用在VIO联合初始化中(使用的是关键帧序列)。这里的顶点是陀螺仪偏置GyroBias,使用旋转R来优化,边是EdgeGyrBias自己定义继承基本一元边,其误差计算以及更新在g2otypes.cpp中完成。误差计算的公式就是初始化中的公式,雅各比矩阵的更新还没搞明白。
3. LocalBundleAdjustmentNavState(KeyFrame*pKF, const std::list
主要在LocalMapping线程中使用,具体的使用地点是与纯视觉相同,在所有的关键帧和MapPoint都处理好之后,判断是否完成VIO初始化,完成就进行这一优化方法,否则按原视觉优化方法。
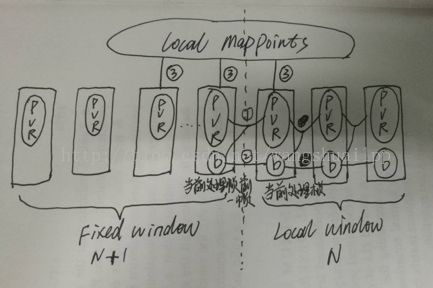
(1) 获得和当前关键帧相连(共视)的所有关键帧,放到lLocalKeyFrames中;获得能够被lLocalKeyFrames关键帧(包含当前关键帧)观测到的局部MapPoints,放到lLocalMapPoints中;获得能够观测到lLocalMapPoints的其他不在局部地图中的关键帧,这一部分关键帧放到lFixedCameras中,不参与下面的优化(也就是不优化其结果),但也可以起到约束的作用。
(2) 完成上面的与处理之后,就进行真正的优化,这里优化1代表当前处理的关键帧的PVR和当前处理关键帧的前一关键帧的PVR、Bias的连接,2代表当前处理关键帧的Bias与前一关键帧的Bias的连接。3代表Local MapPoints与局部地图中的关键帧和Fixed中的关键帧的连接。
4. GlobalBundleAdjustmentNavState(Map*pMap, const cv::Mat& gw, int nIterations, bool* pbStopFlag, const unsignedlong nLoopKF, const bool bRobust)
这部分主要使用在LoopClosing中,主要是优化所有的状态量(PVR、Bias)以及MapPoints。