ORB_SLAM2代码阅读(1)——系统入口
ORB_SLAM2代码阅读(1)——系统简介
- 1、说明
- 2、简介
- 3、stereo_kitti.cc
- 4、SLAM系统文件(System.cc)
- 4.1 构造函数System()
- 4.2 TrackStereo()
- 4.3 SaveTrajectoryKITTI (const string &filename)
- 5.总结
1、说明
本文以~/ORB_SLAM2/Examples/Stereo/stereo_kitti.cc 为起点一步步阅读ORB_SLAM2代码。由于本人也是初学,阅读代码过程中难免出现错误,希望各位谅解。
2、简介
ORB-SLAM是由Raul Mur-Artal,J. M. M. Montiel和Juan D. Tardos于2015年发表在IEEE Transactions on Robotics。ORB-SLAM是一个基于特征点的实时单目SLAM系统,在大规模的、小规模的、室内室外的环境都可以运行。该系统对剧烈运动也很鲁棒,支持宽基线的闭环检测和重定位,包括全自动初始化。该系统包含了所有SLAM系统共有的模块:跟踪(Tracking)、建图(Mapping)、重定位(Relocalization)、闭环检测(Loop closing)。由于ORB-SLAM系统是基于特征点的SLAM系统,故其能够实时计算出相机的轨线,并生成场景的稀疏三维重建结果。ORB-SLAM2在ORB-SLAM的基础上,还支持标定后的双目相机和RGB-D相机。
其系统结构图如下图所示:

可以看到ORB-SLAM主要分为三个线程进行,分别是Tracking、LocalMapping和LoopClosing。三个线程分别存放在对应的三个文件中,分别是Tracking.cpp、LocalMapping.cpp和LoopClosing.cpp文件中,很容易找到。
3、stereo_kitti.cc
stereo_kitti.cc 是针对KITTI数据集的双目ORB_SLAM示例。该示例比较简单,主要包括四部分:
- 载入图像 :根据命令行输入的参数,载入在相关文件夹下图像和时间戳。
LoadImages(string(argv[3]), vstrImageLeft, vstrImageRight, vTimestamps);*注 :该过程只是将图像的名称保存在相应的vector变量中。 - 创建SLAM系统:根据命令行输入的参数创建SLAM系统并进行系统初始化。
ORB_SLAM2::System SLAM(argv[1],argv[2],ORB_SLAM2::System::STEREO,true);其中:argv[1]表示词袋文件的路径,argv[2]表示配置文件的路径,ORB_SLAM2::System::STEREO表示创建SLAM系统为双目SLAM系统,true表示进行可视化操作。 - 传入图像进行追踪 :通过一个循环过程将图像传入SLAM系统中进行追踪。
SLAM.TrackStereo(imLeft,imRight,tframe); - 停止SLAM系统并保存轨迹:通过
Shutdown()函数停止SLAM系统中的所有线程,利用SaveTrajectoryKITTI()函数来保存轨迹。
该示例主要内容就是这三部分,其他内容主要是相关变量的定义和追踪时间的统计过程。
4、SLAM系统文件(System.cc)
ORB_SLAM2作者将整个系统进行了完整的封装并定义了一个System类作为系统的入口。System类的类图如下图所示:
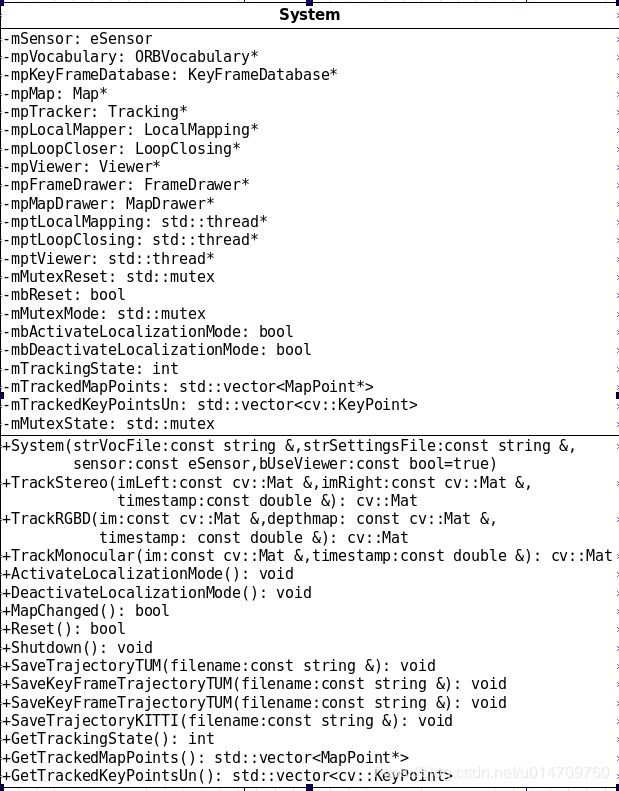
4.1 构造函数System()
在System类的构造函数中,主要执行以下操作:
- 判断传感器类型
- 检验配置文件
- 载入词袋
- 实例化相关成员变量:包括局部建图线程、回环检测线程和视图线程的实例化。注:主线程即为追踪线程!
- 各个线程之间交叉设置指针
4.2 TrackStereo()
System类的构造函数将系统运行的所有条件都已经准备就绪,等待图片序列的传入。在stereo_kitti.cc示例中通过SLAM.TrackStereo(imLeft,imRight,tframe)传入图片序列。因此,我们也选择该函数作为切入点进行阅读(TrackRGBD()、TrackMonocular()与TrackStereo()大同小异,不再赘述)。
cv::Mat System::TrackStereo(const cv::Mat &imLeft, const cv::Mat &imRight, const double ×tamp)
{
if(mSensor!=STEREO)
{
cerr << "ERROR: you called TrackStereo but input sensor was not set to STEREO." << endl;
exit(-1);
}
// Check mode change
{
unique_lock lock(mMutexMode); //在该声明周期内对 mMutexMode 进行上锁操作,不允许其他线程修改定位模式
if(mbActivateLocalizationMode) //激活定位模式
{
mpLocalMapper->RequestStop();
// Wait until Local Mapping has effectively stopped
while(!mpLocalMapper->isStopped())
{
usleep(1000);
}
mpTracker->InformOnlyTracking(true);
mbActivateLocalizationMode = false;
}
if(mbDeactivateLocalizationMode) //停用定位模式
{
mpTracker->InformOnlyTracking(false);
mpLocalMapper->Release();
mbDeactivateLocalizationMode = false;
}
}
// Check reset
{
unique_lock lock(mMutexReset);
if(mbReset)
{
mpTracker->Reset();
mbReset = false;
}
}
cv::Mat Tcw = mpTracker->GrabImageStereo(imLeft,imRight,timestamp);
unique_lock lock2(mMutexState);
mTrackingState = mpTracker->mState;//更新追踪状态
mTrackedMapPoints = mpTracker->mCurrentFrame.mvpMapPoints;//更新地图点向量
mTrackedKeyPointsUn = mpTracker->mCurrentFrame.mvKeysUn;//更新关键点向量
return Tcw;//返回相机坐标系到世界坐标系的变换矩阵
}
在TrackStereo()函数中主要执行以下操作:
- 首先检验传感器类型。若传感器类型错误则直接退出。
- 检验定位模式的变化。若定位模式被激活,则关闭局部建图功能,系统只进行定位。若定位模式被关闭,则之前建立的局部地图被释放(清除)。
- 检验系统是否被重启(有UI界面控制),若系统重启,则重启追踪器。
- 为追踪器输入图像数据,返回世界坐标系到相机坐标系的变换矩阵。
- 更新变量
4.3 SaveTrajectoryKITTI (const string &filename)
保存轨迹函数值得详细说明一下。
void System::SaveTrajectoryKITTI(const string &filename)
{
cout << endl << "Saving camera trajectory to " << filename << " ..." << endl;
if(mSensor==MONOCULAR)
{
cerr << "ERROR: SaveTrajectoryKITTI cannot be used for monocular." << endl;
return;
}
vector vpKFs = mpMap->GetAllKeyFrames();//获取所有的关键帧
sort(vpKFs.begin(),vpKFs.end(),KeyFrame::lId);//对关键帧进行排序
// Transform all keyframes so that the first keyframe is at the origin.
// After a loop closure the first keyframe might not be at the origin.
cv::Mat Two = vpKFs[0]->GetPoseInverse();
ofstream f;
f.open(filename.c_str());
f << fixed;
// Frame pose is stored relative to its reference keyframe (which is optimized by BA and pose graph).
// We need to get first the keyframe pose and then concatenate the relative transformation.
// Frames not localized (tracking failure) are not saved.
// For each frame we have a reference keyframe (lRit), the timestamp (lT) and a flag
// which is true when tracking failed (lbL).
// 链表mlpReferences保存了所有图像帧的参考关键帧
// 链表mlRelativeFramePoses保存了所有图像帧的相对于参考帧的姿态变换关系
list::iterator lRit = mpTracker->mlpReferences.begin();
list::iterator lT = mpTracker->mlFrameTimes.begin();
for(list::iterator lit=mpTracker->mlRelativeFramePoses.begin(), lend=mpTracker->mlRelativeFramePoses.end();lit!=lend;lit++, lRit++, lT++)
{
ORB_SLAM2::KeyFrame* pKF = *lRit;
cv::Mat Trw = cv::Mat::eye(4,4,CV_32F);
while(pKF->isBad())
{
// cout << "bad parent" << endl;
Trw = Trw*pKF->mTcp;
pKF = pKF->GetParent();
}
Trw = Trw*pKF->GetPose()*Two;//计算全局坐标系到参考关键帧坐标系变换关系
cv::Mat Tcw = (*lit)*Trw; //计算全局坐标系到相机坐标系的变换关系,注:Tcw是全局坐标系到相机坐标系的变换
/************************************************************************
* Tcw是全局坐标系到相机坐标系的变换
* Tcw的逆为相机坐标系到全局坐标系的变换
* 变换矩阵的逆可由下式计算
* T^-1 =[ R^T -R^T*t
* 0^T 1 ]
*
* **********************************************************************/
cv::Mat Rwc = Tcw.rowRange(0,3).colRange(0,3).t();//根据Tcw计算相机坐标系到全局坐标系的旋转矩阵
cv::Mat twc = -Rwc*Tcw.rowRange(0,3).col(3); //根据Tcw计算相机坐标系到全局坐标系的平移向量
//将旋转矩阵和平移向量写入文件
f << setprecision(9) << Rwc.at(0,0) << " " << Rwc.at(0,1) << " " << Rwc.at(0,2) << " " << twc.at(0) << " " <<
Rwc.at(1,0) << " " << Rwc.at(1,1) << " " << Rwc.at(1,2) << " " << twc.at(1) << " " <<
Rwc.at(2,0) << " " << Rwc.at(2,1) << " " << Rwc.at(2,2) << " " << twc.at(2) << endl;
}
f.close();
cout << endl << "trajectory saved!" << endl;
}
追踪器中维护了两个重要的链表——mlpReferences 和 mlRelativeFramePoses。其中mlpReferences保存了所有图像帧的参考关键帧;mlRelativeFramePoses保存了图像帧的相对于参考帧的姿态变换关系,即图像与参考关键帧之间的变换矩阵。这正是由于这两个链表的存在,我们才能将整个运动轨迹保存下来。
计算每一帧图像相对于原点处的姿态的流程如下:
- 从 mpMap 变量处获取所有关键帧并对这些关键帧按ID号进行排序。
- 获取第一个关键帧的位姿信息。
- 根据链表mlpReferences和mlRelativeFramePoses的数据,以遍历的方式计算每一帧的姿态。在该过程中:
1).首先计算全局坐标系与参考关键帧之间的变换关系Trw。
2).计算当前帧相对于全局坐标系的变换关系Tcw。注:Tcw是全局坐标系到相机坐标系的变换,而最终要求的结果是相机坐标系到全局坐标系的变换关系。两者互为逆运算。
3).根据Tcw计算相机坐标系到全局坐标系的旋转矩阵Rwc和平移向量twc。
5.总结
作为整个ORB_SLAM2系统的入口,System类并不是很那理解,我对其中的内容解释的并不多,如果逐行阅读代码,实在是太费唇舌。我相信大家都能看明白,所以讲的粗糙一点。下一篇博客一起阅读关于追踪部分的代码,我尽力记录的详细些。如有错误或遗漏,欢迎留言!希望大家支持!