使用Pioneer3at 声呐避障
LZ之前准备使用kinect转换成laser信息,然后对障碍物进行避障.rgbd传感器还是存在限制的,使用kinect的视野宽度大约只有57度,RGB-D摄像头对50厘米(大约2英寸)以内的物体是无法看见的.
所以,如果障碍物距离小车很近,或者不在视野的角度之内,是很容易撞上障碍物的(LZ血泪的教训,因为实验室空间有限,所以…)
如果使用雷达的话还是增加成本的问题,虽然有,但是不想添加…
最后使用的就是pioneer3at中声呐,其中一共有16个声呐.LZ只用到前八个,具体的手册如下:

当中还涉及到对ARIA库的使用,建议看LZ的这篇博客之前先简单翻阅一下关于ARIA API部分,熟悉一下基本的接口使用方法,阅读一下rosaria的源码.
最后附上源码
用于连接pioneer3at和sonar的头文件connect_pioneer.h
//
// Created by felaim on 5/31/18.
//
//Include files
#include // 针对的是声呐产生的数据
#include // 可以将声呐数据转换成点云的形式
#include "nav_msgs/Odometry.h"
#include "rosaria/BumperState.h"
#include "tf/tf.h"
#include "tf/transform_listener.h"
#include "tf/transform_broadcaster.h"
#include "tf/transform_datatypes.h"
#include myPublishCB;
//ArRobot::ChargeState batteryCharge;
//for odom->base_link transform
tf::TransformBroadcaster odom_broadcaster;
geometry_msgs::TransformStamped odom_trans;
std::string frame_id_odom;
std::string frame_id_base_link;
std::string frame_id_bumper;
std::string frame_id_sonar;
// flag indicating whether sonar was enabled or disabled on the robot
bool sonar_enabled;
// enable and publish sonar topics. set to true when first subscriber connects, set to false when last subscriber disconnects.
bool publish_sonar;
bool publish_sonar_pointcloud2;
// Debug Aria
bool debug_aria;
std::string aria_log_filename;
// Robot Calibration Parameters (see readParameters() function)
int TicksMM, DriftFactor, RevCount; //If TicksMM or RevCount are <0, don't use. If DriftFactor is -99999, don't use (DriftFactor could be 0 or negative).
// dynamic_reconfigure
dynamic_reconfigure::Server *dynamic_reconfigure_server;
// whether to publish aria lasers
// bool publish_aria_lasers;
};
//这里读取的参数主要就是之前进行线速度\角速度校正给的参数,因为我拿到的小车都没气了,
// 后来自己充气后,胎压可能不一致,要进行校正,具体的参数可以写在launch文件中
void RosAriaNode::readParameters() {
// Robot Parameters. If a parameter was given and is nonzero, set it now.
// Otherwise, get default value for this robot (from getOrigRobotConfig()).
// Parameter values are stored in member variables for possible later use by the user with dynamic reconfigure.
robot->lock();
ros::NodeHandle n_("~");
if (n_.getParam("TicksMM", TicksMM) && TicksMM > 0) {
ROS_INFO("Setting robot TicksMM from ROS Parameter: %d", TicksMM);
robot->comInt(93, TicksMM);
} else {
TicksMM = robot->getOrigRobotConfig()->getTicksMM();
ROS_INFO("This robot's TicksMM parameter: %d", TicksMM);
//n_.setParam( "TicksMM", TicksMM);
}
if (n_.getParam("DriftFactor", DriftFactor) && DriftFactor != -99999) {
ROS_INFO("Setting robot DriftFactor from ROS Parameter: %d", DriftFactor);
robot->comInt(89, DriftFactor);
} else {
DriftFactor = robot->getOrigRobotConfig()->getDriftFactor();
ROS_INFO("This robot's DriftFactor parameter: %d", DriftFactor);
//n_.setParam( "DriftFactor", DriftFactor);
}
if (n_.getParam("RevCount", RevCount) && RevCount > 0) {
ROS_INFO("Setting robot RevCount from ROS Parameter: %d", RevCount);
robot->comInt(88, RevCount);
} else {
RevCount = robot->getOrigRobotConfig()->getRevCount();
ROS_INFO("This robot's RevCount parameter: %d", RevCount);
//n_.setParam( "RevCount", RevCount);
}
robot->unlock();
}
void RosAriaNode::dynamic_reconfigureCB(rosaria::RosAriaConfig &config, uint32_t level) {
//
// Odometry Settings
//
//先对robot进行lock,在进行修改
robot->lock();
if (TicksMM != config.TicksMM && config.TicksMM > 0) {
ROS_INFO("Setting TicksMM from Dynamic Reconfigure: %d -> %d ", TicksMM, config.TicksMM);
TicksMM = config.TicksMM;
robot->comInt(93, TicksMM);
}
if (DriftFactor != config.DriftFactor && config.DriftFactor != -99999) {
ROS_INFO("Setting DriftFactor from Dynamic Reconfigure: %d -> %d ", DriftFactor, config.DriftFactor);
DriftFactor = config.DriftFactor;
robot->comInt(89, DriftFactor);
}
if (RevCount != config.RevCount && config.RevCount > 0) {
ROS_INFO("Setting RevCount from Dynamic Reconfigure: %d -> %d ", RevCount, config.RevCount);
RevCount = config.RevCount;
robot->comInt(88, RevCount);
}
//
// Acceleration Parameters
//
int value;
value = config.trans_accel * 1000;
if (value != robot->getTransAccel() && value > 0) {
ROS_INFO("Setting TransAccel from Dynamic Reconfigure: %d", value);
robot->setTransAccel(value);
}
value = config.trans_decel * 1000;
if (value != robot->getTransDecel() && value > 0) {
ROS_INFO("Setting TransDecel from Dynamic Reconfigure: %d", value);
robot->setTransDecel(value);
}
value = config.lat_accel * 1000;
if (value != robot->getLatAccel() && value > 0) {
ROS_INFO("Setting LatAccel from Dynamic Reconfigure: %d", value);
if (robot->getAbsoluteMaxLatAccel() > 0)
robot->setLatAccel(value);
}
value = config.lat_decel * 1000;
if (value != robot->getLatDecel() && value > 0) {
ROS_INFO("Setting LatDecel from Dynamic Reconfigure: %d", value);
if (robot->getAbsoluteMaxLatDecel() > 0)
robot->setLatDecel(value);
}
value = config.rot_accel * 180 / M_PI;
if (value != robot->getRotAccel() && value > 0) {
ROS_INFO("Setting RotAccel from Dynamic Reconfigure: %d", value);
robot->setRotAccel(value);
}
value = config.rot_decel * 180 / M_PI;
if (value != robot->getRotDecel() && value > 0) {
ROS_INFO("Setting RotDecel from Dynamic Reconfigure: %d", value);
robot->setRotDecel(value);
}
//修改结束后,对robot进行unlock
robot->unlock();
}
/// Called when another node subscribes or unsubscribes from sonar topic.
void RosAriaNode::sonarConnectCb() {
publish_sonar = (sonar_pub.getNumSubscribers() > 0);
publish_sonar_pointcloud2 = (sonar_pointcloud2_pub.getNumSubscribers() > 0);
robot->lock();
if (publish_sonar || publish_sonar_pointcloud2) {
robot->enableSonar();
sonar_enabled = false;
} else if (!publish_sonar && !publish_sonar_pointcloud2) {
robot->disableSonar();
sonar_enabled = true;
}
robot->unlock();
}
RosAriaNode::RosAriaNode(ros::NodeHandle nh) :
n(nh),
serial_port(""), serial_baud(0),
conn(NULL), robot(NULL),
myPublishCB(this, &RosAriaNode::publish),
sonar_enabled(false), publish_sonar(false), publish_sonar_pointcloud2(false),
debug_aria(false),
TicksMM(-1), DriftFactor(-99999), RevCount(-1) {
// read in runtime parameters
// port and baud
n.param("port", serial_port, std::string("/dev/ttyUSB0"));
ROS_INFO("RosAria: set port: [%s]", serial_port.c_str());
n.param("baud", serial_baud, 0);
if (serial_baud != 0)
ROS_INFO("RosAria: set serial port baud rate %d", serial_baud);
// handle debugging more elegantly
n.param("debug_aria", debug_aria, false); // default not to debug
n.param("aria_log_filename", aria_log_filename, std::string("Aria.log"));
// whether to connect to lasers using aria
// n.param("publish_aria_lasers", publish_aria_lasers, false);
// Get frame_ids to use.
n.param("odom_frame", frame_id_odom, std::string("odom"));
n.param("base_link_frame", frame_id_base_link, std::string("base_link"));
n.param("bumpers_frame", frame_id_bumper, std::string("bumpers"));
n.param("sonar_frame", frame_id_sonar, std::string("sonar"));
// advertise services for data topics
// second argument to advertise() is queue size.
// other argmuments (optional) are callbacks, or a boolean "latch" flag (whether to send current data to new
// subscribers when they subscribe).
// See ros::NodeHandle API docs.
//以第一行发布信息为例,后面几行以此类推
//告诉master我们将要在chatter(话题名,这里指pose)上发布nav_msgs::Odometry消息类型的信息
//这样master就会告诉所有订阅了chatter的节点,将要有数据要发布
//第二个参数是发布序列的大小,如果我们发布的信息的频率太郎高,缓冲区的消息在大于1000个的时候就会开始丢弃先前发布的消息
pose_pub = n.advertise("pose", 1000);
bumpers_pub = n.advertise("bumper_state", 1000);
sonar_pub = n.advertise("sonar", 50,
boost::bind(&RosAriaNode::sonarConnectCb, this),
boost::bind(&RosAriaNode::sonarConnectCb, this));
sonar_pointcloud2_pub = n.advertise("sonar_pointcloud2", 50,
boost::bind(&RosAriaNode::sonarConnectCb, this),
boost::bind(&RosAriaNode::sonarConnectCb, this));
voltage_pub = n.advertise("battery_voltage", 1000);
recharge_state_pub = n.advertise("battery_recharge_state", 5, true /*latch*/ );
recharge_state.data = -2;
state_of_charge_pub = n.advertise("battery_state_of_charge", 100);
motors_state_pub = n.advertise("motors_state", 5, true /*latch*/ );
motors_state.data = false;
published_motors_state = false;
// advertise enable/disable services
enable_srv = n.advertiseService("enable_motors", &RosAriaNode::enable_motors_cb, this);
disable_srv = n.advertiseService("disable_motors", &RosAriaNode::disable_motors_cb, this);
veltime = ros::Time::now();
}
//RosAriaNode的析构函数,断开电机,声呐,机器人停止运动,关闭Aria库
RosAriaNode::~RosAriaNode() {
// disable motors and sonar.
robot->disableMotors();
robot->disableSonar();
robot->stopRunning();
// 程序结束后等待用户的ctrl-C命令
robot->waitForRunExit();
Aria::shutdown();
}
int RosAriaNode::Setup()
{
// Note, various objects are allocated here which are never deleted (freed), since Setup() is only supposed to be
// called once per instance, and these objects need to persist until the process terminates.
robot = new ArRobot();
ArArgumentBuilder *args = new ArArgumentBuilder(); // never freed
ArArgumentParser *argparser = new ArArgumentParser(args); // Warning never freed
argparser->loadDefaultArguments(); // adds any arguments given in /etc/Aria.args. Useful on robots with unusual serial port or baud rate (e.g. pioneer lx)
// Now add any parameters given via ros params (see RosAriaNode constructor):
// if serial port parameter contains a ':' character, then interpret it as hostname:tcpport
// for wireless serial connection. Otherwise, interpret it as a serial port name.
size_t colon_pos = serial_port.find(":");
if (colon_pos != std::string::npos)
{
args->add("-remoteHost"); // pass robot's hostname/IP address to Aria
args->add(serial_port.substr(0, colon_pos).c_str());
args->add("-remoteRobotTcpPort"); // pass robot's TCP port to Aria
args->add(serial_port.substr(colon_pos+1).c_str());
}
else
{
args->add("-robotPort %s", serial_port.c_str()); // pass robot's serial port to Aria
}
// if a baud rate was specified in baud parameter
if(serial_baud != 0)
{
args->add("-robotBaud %d", serial_baud);
}
if( debug_aria )
{
// turn on all ARIA debugging
args->add("-robotLogPacketsReceived"); // log received packets
args->add("-robotLogPacketsSent"); // log sent packets
args->add("-robotLogVelocitiesReceived"); // log received velocities
args->add("-robotLogMovementSent");
args->add("-robotLogMovementReceived");
ArLog::init(ArLog::File, ArLog::Verbose, aria_log_filename.c_str(), true);
}
// Connect to the robot
conn = new ArRobotConnector(argparser, robot); // warning never freed
if (!conn->connectRobot()) {
ROS_ERROR("RosAria: ARIA could not connect to robot! (Check ~port parameter is correct, and permissions on port device, or any errors reported above)");
return 1;
}
// if(publish_aria_lasers)
// laserConnector = new ArLaserConnector(argparser, robot, conn);
// causes ARIA to load various robot-specific hardware parameters from the robot parameter file in /usr/local/Aria/params
if(!Aria::parseArgs())
{
ROS_ERROR("RosAria: ARIA error parsing ARIA startup parameters!");
return 1;
}
readParameters();
// Start dynamic_reconfigure server
dynamic_reconfigure_server = new dynamic_reconfigure::Server;
// Setup Parameter Minimums and maximums
rosaria::RosAriaConfig dynConf_min;
rosaria::RosAriaConfig dynConf_max;
dynConf_max.trans_accel = robot->getAbsoluteMaxTransAccel() / 1000;
dynConf_max.trans_decel = robot->getAbsoluteMaxTransDecel() / 1000;
// TODO: Fix rqt dynamic_reconfigure gui to handle empty intervals
// Until then, set unit length interval.
dynConf_max.lat_accel = ((robot->getAbsoluteMaxLatAccel() > 0.0) ? robot->getAbsoluteMaxLatAccel() : 0.1) / 1000;
dynConf_max.lat_decel = ((robot->getAbsoluteMaxLatDecel() > 0.0) ? robot->getAbsoluteMaxLatDecel() : 0.1) / 1000;
dynConf_max.rot_accel = robot->getAbsoluteMaxRotAccel() * M_PI/180;
dynConf_max.rot_decel = robot->getAbsoluteMaxRotDecel() * M_PI/180;
dynConf_min.trans_accel = 0;
dynConf_min.trans_decel = 0;
dynConf_min.lat_accel = 0;
dynConf_min.lat_decel = 0;
dynConf_min.rot_accel = 0;
dynConf_min.rot_decel = 0;
dynConf_min.TicksMM = 0;
dynConf_max.TicksMM = 200;
dynConf_min.DriftFactor = -99999;
dynConf_max.DriftFactor = 32767;
dynConf_min.RevCount = 0;
dynConf_max.RevCount = 65535;
dynamic_reconfigure_server->setConfigMax(dynConf_max);
dynamic_reconfigure_server->setConfigMin(dynConf_min);
rosaria::RosAriaConfig dynConf_default;
dynConf_default.trans_accel = robot->getTransAccel() / 1000;
dynConf_default.trans_decel = robot->getTransDecel() / 1000;
dynConf_default.lat_accel = robot->getLatAccel() / 1000;
dynConf_default.lat_decel = robot->getLatDecel() / 1000;
dynConf_default.rot_accel = robot->getRotAccel() * M_PI/180;
dynConf_default.rot_decel = robot->getRotDecel() * M_PI/180;
dynConf_default.TicksMM = 0;
dynConf_default.DriftFactor = -99999;
dynConf_default.RevCount = 0;
dynamic_reconfigure_server->setConfigDefault(dynConf_default);
dynamic_reconfigure_server->setCallback(boost::bind(&RosAriaNode::dynamic_reconfigureCB, this, _1, _2));
// Enable the motors
robot->enableMotors();
// disable sonars on startup
// robot->disableSonar();
// enable sonars on startup
robot->enableSonar();
// callback will be called by ArRobot background processing thread for every SIP data packet received from robot
robot->addSensorInterpTask("ROSPublishingTask", 100, &myPublishCB);
// Initialize bumpers with robot number of bumpers
bumpers.front_bumpers.resize(robot->getNumFrontBumpers());
bumpers.rear_bumpers.resize(robot->getNumRearBumpers());
// Run ArRobot background processing thread
robot->runAsync(true);
// connect to lasers and create publishers
// if(publish_aria_lasers)
// {
// ROS_INFO_NAMED("rosaria", "rosaria: Connecting to laser(s) configured in ARIA parameter file(s)...");
// if (!laserConnector->connectLasers())
// {
// ROS_FATAL_NAMED("rosaria", "rosaria: Error connecting to laser(s)...");
// return 1;
// }
//
// robot->lock();
// const std::map *lasers = robot->getLaserMap();
// ROS_INFO_NAMED("rosaria", "rosaria: there are %lu connected lasers", lasers->size());
// for(std::map::const_iterator i = lasers->begin(); i != lasers->end(); ++i)
// {
// ArLaser *l = i->second;
// int ln = i->first;
// std::string tfname("laser");
// if(lasers->size() > 1 || ln > 1) // no number if only one laser which is also laser 1
// tfname += ln;
// tfname += "_frame";
// ROS_INFO_NAMED("rosaria", "rosaria: Creating publisher for laser #%d named %s with tf frame name %s", ln, l->getName(), tfname.c_str());
// new LaserPublisher(l, n, true, tfname);
// }
// robot->unlock();
// ROS_INFO_NAMED("rosaria", "rosaria: Done creating laser publishers");
// }
// subscribe to command topics
cmdvel_sub = n.subscribe( "cmd_vel", 1, (boost::function <void(const geometry_msgs::TwistConstPtr&)>)
boost::bind(&RosAriaNode::cmdvel_cb, this, _1 ));
// register a watchdog for cmd_vel timeout
double cmdvel_timeout_param = 0.6;
n.param("cmd_vel_timeout", cmdvel_timeout_param, 0.6);
cmdvel_timeout = ros::Duration(cmdvel_timeout_param);
if (cmdvel_timeout_param > 0.0)
cmdvel_watchdog_timer = n.createTimer(ros::Duration(0.1), &RosAriaNode::cmdvel_watchdog, this);
ROS_INFO_NAMED("rosaria", "rosaria: Setup complete");
return 0;
}
//ros::spin() 在调用后不会再返回,也就是你的主程序到这儿就不往下执行了,
// 而 ros::spinOnce() 后者在调用后还可以继续执行之后的程序。
void RosAriaNode::spin()
{
ros::spin();
}
void RosAriaNode::publish()
{
// Note, this is called via SensorInterpTask callback (myPublishCB, named "ROSPublishingTask"). ArRobot object 'robot' sholud not be locked or unlocked.
pos = robot->getPose();
tf::poseTFToMsg(tf::Transform(tf::createQuaternionFromYaw(pos.getTh()*M_PI/180), tf::Vector3(pos.getX()/1000,
pos.getY()/1000, 0)), position.pose.pose); //Aria returns pose in mm.
position.twist.twist.linear.x = robot->getVel()/1000.0; //Aria returns velocity in mm/s.
position.twist.twist.linear.y = robot->getLatVel()/1000.0;
position.twist.twist.angular.z = robot->getRotVel()*M_PI/180;
position.header.frame_id = frame_id_odom;
position.child_frame_id = frame_id_base_link;
position.header.stamp = ros::Time::now();
pose_pub.publish(position);
ROS_DEBUG("RosAria: publish: (time %f) pose x: %f, pose y: %f, pose angle: %f; linear vel x: %f, vel y: %f; angular vel z: %f",
position.header.stamp.toSec(),
(double)position.pose.pose.position.x,
(double)position.pose.pose.position.y,
(double)position.pose.pose.orientation.w,
(double)position.twist.twist.linear.x,
(double)position.twist.twist.linear.y,
(double)position.twist.twist.angular.z
);
// publishing transform odom->base_link
odom_trans.header.stamp = ros::Time::now();
odom_trans.header.frame_id = frame_id_odom;
odom_trans.child_frame_id = frame_id_base_link;
odom_trans.transform.translation.x = pos.getX()/1000;
odom_trans.transform.translation.y = pos.getY()/1000;
odom_trans.transform.translation.z = 0.0;
odom_trans.transform.rotation = tf::createQuaternionMsgFromYaw(pos.getTh()*M_PI/180);
odom_broadcaster.sendTransform(odom_trans);
// getStallValue returns 2 bytes with stall bit and bumper bits, packed as (00 00 FrontBumpers RearBumpers)
int stall = robot->getStallValue();
unsigned char front_bumpers = (unsigned char)(stall >> 8);
unsigned char rear_bumpers = (unsigned char)(stall);
bumpers.header.frame_id = frame_id_bumper;
bumpers.header.stamp = ros::Time::now();
std::stringstream bumper_info(std::stringstream::out);
// Bit 0 is for stall, next bits are for bumpers (leftmost is LSB)
for (unsigned int i=0; igetNumFrontBumpers(); i++)
{
bumpers.front_bumpers[i] = (front_bumpers & (1 << (i+1))) == 0 ? 0 : 1;
bumper_info << " " << (front_bumpers & (1 << (i+1)));
}
ROS_DEBUG("RosAria: Front bumpers:%s", bumper_info.str().c_str());
bumper_info.str("");
// Rear bumpers have reverse order (rightmost is LSB)
unsigned int numRearBumpers = robot->getNumRearBumpers();
for (unsigned int i=0; i1 << (numRearBumpers-i))) == 0 ? 0 : 1;
bumper_info << " " << (rear_bumpers & (1 << (numRearBumpers-i)));
}
ROS_DEBUG("RosAria: Rear bumpers:%s", bumper_info.str().c_str());
bumpers_pub.publish(bumpers);
//Publish battery information
// TODO: Decide if BatteryVoltageNow (normalized to (0,12)V) is a better option
std_msgs::Float64 batteryVoltage;
batteryVoltage.data = robot->getRealBatteryVoltageNow();
voltage_pub.publish(batteryVoltage);
if(robot->haveStateOfCharge())
{
std_msgs::Float32 soc;
soc.data = robot->getStateOfCharge()/100.0;
state_of_charge_pub.publish(soc);
}
// publish recharge state if changed
char s = robot->getChargeState();
if(s != recharge_state.data)
{
ROS_INFO("RosAria: publishing new recharge state %d.", s);
recharge_state.data = s;
recharge_state_pub.publish(recharge_state);
}
// publish motors state if changed
bool e = robot->areMotorsEnabled();
if(e != motors_state.data || !published_motors_state)
{
ROS_INFO("RosAria: publishing new motors state %d.", e);
motors_state.data = e;
motors_state_pub.publish(motors_state);
published_motors_state = true;
}
// Publish sonar information, if enabled.
if (publish_sonar || publish_sonar_pointcloud2)
{
sensor_msgs::PointCloud cloud; //sonar readings.
cloud.header.stamp = position.header.stamp; //copy time.
// sonar sensors relative to base_link
cloud.header.frame_id = frame_id_sonar;
std::stringstream sonar_debug_info; // Log debugging info
sonar_debug_info << "Sonar readings: ";
for (int i = 0; i < robot->getNumSonar(); i++) {
ArSensorReading* reading = NULL;
reading = robot->getSonarReading(i);
if(!reading) {
ROS_WARN("RosAria: Did not receive a sonar reading.");
continue;
}
// getRange() will return an integer between 0 and 5000 (5m)
sonar_debug_info << reading->getRange() << " ";
// local (x,y). Appears to be from the centre of the robot, since values may
// exceed 5000. This is good, since it means we only need 1 transform.
// x & y seem to be swapped though, i.e. if the robot is driving north
// x is north/south and y is east/west.
//
//ArPose sensor = reading->getSensorPosition(); //position of sensor.
// sonar_debug_info << "(" << reading->getLocalX()
// << ", " << reading->getLocalY()
// << ") from (" << sensor.getX() << ", "
// << sensor.getY() << ") ;; " ;
//add sonar readings (robot-local coordinate frame) to cloud
geometry_msgs::Point32 p;
p.x = reading->getLocalX() / 1000.0;
p.y = reading->getLocalY() / 1000.0;
p.z = 0.0;
cloud.points.push_back(p);
}
ROS_DEBUG_STREAM(sonar_debug_info.str());
// publish topic(s)
if(publish_sonar_pointcloud2)
{
sensor_msgs::PointCloud2 cloud2;
if(!sensor_msgs::convertPointCloudToPointCloud2(cloud, cloud2))
{
ROS_WARN("Error converting sonar point cloud message to point_cloud2 type before publishing! Not publishing this time.");
}
else
{
sonar_pointcloud2_pub.publish(cloud2);
}
}
if(publish_sonar)
{
sonar_pub.publish(cloud);
}
} // end if sonar_enabled
}
bool RosAriaNode::enable_motors_cb(std_srvs::Empty::Request& request, std_srvs::Empty::Response& response)
{
ROS_INFO("RosAria: Enable motors request.");
robot->lock();
if(robot->isEStopPressed())
ROS_WARN("RosAria: Warning: Enable motors requested, but robot also has E-Stop button pressed. Motors will not enable.");
robot->enableMotors();
robot->unlock();
// todo could wait and see if motors do become enabled, and send a response with an error flag if not
return true;
}
bool RosAriaNode::disable_motors_cb(std_srvs::Empty::Request& request, std_srvs::Empty::Response& response)
{
ROS_INFO("RosAria: Disable motors request.");
robot->lock();
robot->disableMotors();
robot->unlock();
// todo could wait and see if motors do become disabled, and send a response with an error flag if not
return true;
}
void
RosAriaNode::cmdvel_cb( const geometry_msgs::TwistConstPtr &msg)
{
veltime = ros::Time::now();
ROS_INFO( "new speed: [%0.2f,%0.2f](%0.3f)", msg->linear.x*1e3, msg->angular.z, veltime.toSec() );
robot->lock();
robot->setVel(msg->linear.x*1e3);
if(robot->hasLatVel())
robot->setLatVel(msg->linear.y*1e3);
robot->setRotVel(msg->angular.z*180/M_PI);
robot->unlock();
ROS_DEBUG("RosAria: sent vels to to aria (time %f): x vel %f mm/s, y vel %f mm/s, ang vel %f deg/s", veltime.toSec(),
(double) msg->linear.x * 1e3, (double) msg->linear.y * 1.3, (double) msg->angular.z * 180/M_PI);
}
void RosAriaNode::cmdvel_watchdog(const ros::TimerEvent& event)
{
// stop robot if no cmd_vel message was received for 0.6 seconds
if (ros::Time::now() - veltime > ros::Duration(0.6))
{
robot->lock();
robot->setVel(0.0);
if(robot->hasLatVel())
robot->setLatVel(0.0);
robot->setRotVel(0.0);
robot->unlock();
}
}
void RosAriaNode::robotWander()
{
robot->lock();
ArKeyHandler keyHandler;
ArSonarDevice sonar;
Aria::setKeyHandler(&keyHandler);
robot->attachKeyHandler(&keyHandler);
//puts("This program will make the robot wander around. It uses some avoidance\n"
//"actions if obstacles are detected, otherwise it just has a\n"
//"constant forward velocity.\n\nPress Escape to exit.");
ArActionStallRecover recover;
//ArActionBumpers bumpers;
ArActionAvoidFront avoidFrontNear("Avoid Front Near",500, 0);
ArActionAvoidFront avoidFrontFar;
ArActionConstantVelocity constantVelocity("Constant Velocity",150);
ArActionLimiterForwards limiter("speed limiter near", 300, 600, 250);
// limiter for far away obstacles
//ArActionLimiterForwards (const char *name="speed limiter", double stopDistance=250, double slowDistance=1000, double slowSpeed=200, double widthRatio=1)
ArActionLimiterForwards limiterFar("speed limiter far", 300, 1100, 200);
robot->addRangeDevice(&sonar);
robot->addAction(&limiter, 95);
robot->addAction(&limiterFar, 90);
robot->addAction(&recover, 100);
//robot->addAction(&bumpers, 75);
robot->addAction(&avoidFrontNear, 50);
robot->addAction(&avoidFrontFar, 49);
robot->addAction(&constantVelocity, 25);
robot->enableMotors();
//it is really important
robot->enableSonar();
robot->unlock();
robot->waitForRunExit();
}
connect_pioneer.cpp
//
// Created by felaim on 6/6/18.
//
#include "connect_pioneer.h"
int main(int argc, char** argv)
{
ros::init(argc, argv, "felaim_2dnav");
ros::NodeHandle n(std::string("~"));
Aria::init();
RosAriaNode *node = new RosAriaNode(n);
if(node->Setup() != 0)
{
ROS_FATAL("RosAria: ROS node setup failed ...\n");
return -1;
}
ROS_INFO("\n The robot is wandering now!\n\n********\n\n\t\t Please press ESC to STOP! \n\n********");
node->robotWander();
delete node;
ROS_INFO("RosAria: Quitting ... \n");
return 0;
}用catkin_make进行编译
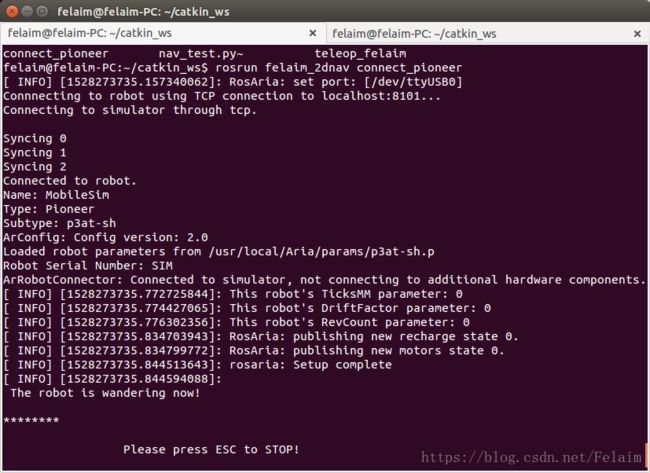
用MobileSim仿真的结果

热的头晕晕的每天,LZ喜欢冬天O(∩_∩)O哈哈~脑子会比较清醒…