V-rep机器人仿真软件使用的学习笔记-续
相关博客:
V-rep机器人仿真软件使用的学习笔记
V-rep中机械臂惯性参数的获取方法
前言
这篇博客主要是记录自己学习和使用机器人仿真软件V-rep过程中的一些知识点和踩的坑。是之前这篇V-rep机器人仿真软件使用的学习笔记的续集,新增2020年使用V-rep的笔记,因为是做项目过程遇到问题解决问题的记录,内容依旧比较零散且没有展开详细讲,更基础的V-rep知识请参看之前的博客V-rep机器人仿真软件使用的学习笔记。下面进入正文。
正文
1.child script中thread script中如果在while循环中添加sim.switchThread(),则该thread script执行的时间间隔和仿真间隔保持一致(如果仿真间隔为real-time间隔,则与real-time间隔保持一致),否则该script将以尽可能快的速度进行执行。参考:https://www.cnblogs.com/21207-iHome/p/6767839.html
2.关节电机在力/力矩模式下且电机和控制循环均使能时的三种控制方式:
- 自定义控制方式: 使用Joint callback functions关节回调函数,在回调函数中实现关节电机的闭环控制
- 位置控制(PID闭环),此时力矩是恒定的
- 弹簧阻尼模式:通过力/扭矩调制,该关节将起到弹簧-阻尼系统的作用,此时速度是恒定的
3.关节空间的轨迹规划和位置控制方法
- 使用RML库实现轨迹规划和控制:输入多个目标关节位置,速度参数等,进行运动,阻塞方式执行。RML官方网站:http://www.reflexxes.ws/products/overview-and-download.html。
- 需要自己实现位置闭环,利用sim.setJointTargetVelocity作为速度内环,实现位置速度双环控制,并对多个关节进行控制实现机械臂位置控制,此时关节电机需要电机使能,但控制回路不使能。
- 利用关节电机的位置控制方式,利用sim.setJointTargetPosition输入关节目标位置,V-rep已实现PID位置闭环控制,然后对多个关节进行控制实现机械臂位置控制
4.V-rep中读写文件至本地的方法,参考:http://forum.coppeliarobotics.com/viewtopic.php?f=9&t=571&p=7467&hilit=file+write+in+a+file#p7467, 在脚本中使用Lua的文件读写命令实现,写文件默认路径是V-rep可执行文件所在的路径。
- 写文件
name = "toto.txt" -- 此时文件位于V-rep可执行文件所在目录
-- name = "C:/Sam/A-level/Simulation_Environment/4CONTROL_ALGORITHM/toto.txt" --此时文件位于指定目录
file = io.open(name, "w")
file:write("Hello World")
file:close()
- 读文件
name = "toto.txt"
file = io.open(name, "r")
print(file:read())
file:close()
注意: 在windows系统下文件路径分隔符需要使用左斜杠"/",如果用右斜杠会报错"Lua runtime error: [string “CHILD SCRIPT Cuboid”]:28: attempt to index global ‘file’ (a nil value)".
5.单个关节实现位置闭环,内环为速度环的一种实现(增量式PID)
function pid_init(current_p)
pid = {}
pid["target_position"] = 0 -- target postion
pid["actual_position"] = current_p --actual position
pid["error"] = 0 --??
pid["error_next"] = 0 --previous err
pid["error_last"] = 0 --previous previous err
pid["kp"] = 3.5 --kp ki kd parematers note: rad: kp=0.1 reg: pid = 3.5 0.3 0.3
pid["ki"] = 0.3
pid["kd"] = 0.3
factor = 180.0/3.14159
increment_position = 0 --incremnet
end
function pid_realise(target_p, current_p) --implement pid, rarget is deg, current is rad
pid["target_position"] = target_p --set target position
pid["actual_position"] = current_p -- current position
pid["error"] = pid["target_position"] - pid["actual_position"]
increment_position =increment_position + pid["kp"]*(pid["error"]-pid["error_next"])+pid["ki"]*pid["error"]+pid["kd"]*(pid["error"]-2*pid["error_next"]+pid["error_last"]) --??????
pid["error_last"] = pid["error_next"] --next loop
pid["error_next"] = pid["error"]
if (increment_position > 175) --limited the increment
then
increment_position = 175
end
if (increment_position < -175)
then
increment_position = -175
end
print(increment_position, pid["error"], pid["target_position"], pid["actual_position"])
return increment_position
end
function sysCall_threadmain()
-- Put some initialization code here
position = sim.getJointPosition(18) -- 18 is the handle of the controled motor
pid_init(position)
-- Put your main loop here, e.g.:
--
while sim.getSimulationState()~=sim.simulation_advancing_abouttostop do
-- local p=sim.getObjectPosition(objHandle,-1)
-- p[1]=p[1]+0.001
-- sim.setObjectPosition(objHandle,-1,p)
--time_step = sim.getSimulationTimeStep()
time_step = sim.getSimulationTime()
position = sim.getJointPosition(18)
increment = pid_realise(90, position*factor)
--print('Test')
print(time_step, increment)--position*factor)
sim.setJointTargetVelocity(18, increment/factor)
--name = "C:/Sam/A-level/Simulation_Environment/4CONTROL_ALGORITHM/toto.txt"
--file = io.open(name, "a")
--file:write("Hello World \n")
--file:write(increment)
--file:write("\n")
--file:close()
sim.switchThread() -- resume in next simulation step
end
end
5.机械臂逆解的两种方法
V-rep支持伪逆法和数值法两种机械臂逆解方法,通常伪逆法速度快,但是遇到奇异问题可能解不存在,数值法速度慢但是基本能保证解的存在。。可以同时设置这两种解法,V-rep会默认先使用伪逆法,当伪逆法无解时,会再调用数值法求解,对于DLS逆解方法需要设置Edit conditional parameters,在Perform if…条件栏中进行配置:如果undamped方法失败,则执行damped方法。可以参考官方robots–>non-mobile–>7 Dof manipulator.ttm场景模型中的设置方法以及博客:https://www.cnblogs.com/21207-iHome/p/7420733.html。
6.机械臂逆运动学模式的使用
在逆运动学模式下,拖动target,关节将自动求逆解并转动至对应位置。这种模式的设置参考官方robots–>non-mobile–>7 Dof manipulator.ttm场景模型中的设置方法,主要有以下几个要点:
- 机械臂关节处于
Inverse kinematics mode,如果机械臂均设置为动力学使能,则Hybrid operation也要使能 - 必须设置两组逆运动学解算对,一组使用Pseudo inverse(伪逆解)方法,一组使用DLS(数值解)方法
7.URDF文件不支持对并行结构的机器人结构(包含闭式运动链结构)进行描述,https://answers.ros.org/question/9050/using-ros-for-a-delta-robot/?answer=13094?answer=13094#post-id-13094
8.V-rep中将模型保存至本地
选中模型的根节点,然后在菜单栏中选择File --> Save model as… 将其保存。
注意: 如果Save model as...选项为灰色,说明所选中的模型没有被设置为根节点,这时可以通过设置模型属性Scene Object Properties-->common-->Object is model base即可,还在在Object is model base中Edit model properties编辑模型的相关属性和说明。
9.外部控制器时间步设置与同步的问题
外部力矩控制:https://blog.csdn.net/huangdianye/article/details/80628932
10.让转动关节成为固定关节(不发生转动)的设置方法
可以设置关节的最小位置和转动范围均为0,则关节相当于不发生转动。
11.逆运动学解算模块的细节知识点
位于官方文档的Calculation modules–>Inverse kinematics–>Basics on IK groups and IK elements位置。

- 连杆:如果关节不处于IK模式,则被认为是连杆
- 存在多个IK group时,如果各个group的连杆运动之间存在干涉,则先求解对其他group有影响的group。
- 如果IK chains包含共享关节的结构,则将对应的tip-target包含至一个IK group中:

12.并联机构的正逆运动学
13.双臂紧约束协作得到路径的几种尝试
- 两个机械臂都工作在IK mode,首先将两臂的吸盘吸至板材,然后同时选中两臂的IK_Target进行移动和旋转,由于两臂工作在IK mode,两臂将跟随IK_Target进行运动,这时就可以得到两臂的协作路径,这种方法相当于是人工示教得到双臂协作路径,两臂同时进行路径规划。

- 将两臂分为主从臂,主臂正常进行路径规划和运动,从臂的IK_Target设置在主臂上,这样当主臂运动时,从臂就可以跟随主臂运动。参考官方场景robotCollaboration.ttt的实现方法,利用主从思想和协作约束进行协作路径规划。
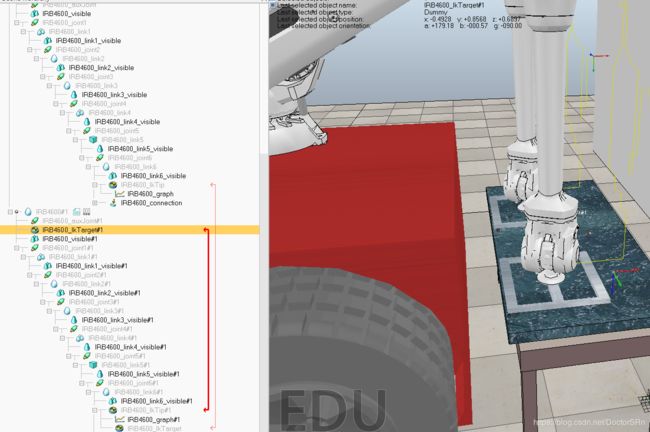
如图所示将一个机械臂的IK_Target附着在另一个机械臂末端(主臂)上,且与所附着机械臂(主臂)的IK_Target保持协作约束关系,此时主臂运动时,从臂将跟随运动。 - 将两臂和板材看成闭式运动链,构成配置空间,然后进行运动规划。这种应该是最合理的方法,但是实现难度较大。
14.IK Mode和FK Mode机械臂的控制
在IK Mode下从空间位置解算得到关节位置,如果机械臂处于IK Mode,则移动IK_Target时机械臂会自动跟随,在IK mode下给定关节位置,机械臂是不会运动的。
在FK Mode时给定机械臂关节角,机械臂移动至对应的位置。
在程序中常使用如下代码实现以上两种状态的切换:
setIkMode=function()
sim.setExplicitHandling(ikGroup,0) -- that enables implicit IK handling
sim.switchThread()
end
setFkMode=function()
sim.setExplicitHandling(ikGroup,1) -- that disables implicit IK handling
sim.switchThread()
sim.setObjectParent(ikTarget,ikTip,true)
sim.setObjectPosition(ikTarget,ikTip,{0,0,0})
sim.setObjectPosition(ikTarget,ikTip,{0,0,0})
end
15.MATLAB Simscape Multibody中导入URDF文件
官方文档:https://ww2.mathworks.cn/help/physmod/sm/ug/urdf-import.html
URDF中的部分标签Simscape Multibody支持,有些属性标签Simscape Multibody并不支持(材料属性,碰撞属性,关节限位属性等),对于不支持的属性标签,导入时会自动忽略。模型的mesh只支持stl格式,其他格式虽然无法导入,但只会导致机械臂外形无法显示出来,不影响机械臂模型的动力学仿真。
导入abb-4600机械臂模型的过程记录(官方文档):
切换至URDF工作路径,然后使用smimport命令进行导入:
smimport('./abb_irb4600_support/urdf/test_abb_4600.urdf')
导入后在simulink界面使用simulation->update diagram更新后可以在Simscape explorer里看到机械臂模型,如果机械臂显示不正常,可能是mesh导入不正常,手动修改simulink中机械臂每个link子模块的visual的stl路径之后再次simulation->update diagram就可以正常显示,或者通过编程自动设置stl文件路径也可以。
ps: 此urdf文件中没有包含inertial属性,默认全为零,所以动力学模型无法正常使用,下面尝试使用meshlab软件结合此机械臂官网datasheet中整机质量参数,来计算inertial参数。
16.机械臂的惯性参数获取问题
① 从Solidworks导出成URDF文件时,可以导出inertial属性,包含惯性参数
② 使用V-rep软件获取惯性参数
③ 可以使用软件Meshlab进行计算,参考ROS官网文档的说明:http://wiki.ros.org/abb_irb1200_support 。大概思路是:官方的机械臂datasheet只提供了整个机械臂的重量,假设机械臂密度均匀恒定,则每个连杆的体积决定其重量,在meshlab中可以得到机械臂各个连杆的体积,进一步得到惯性参数。
PS: 可以去机械臂的官网下载机械臂的CAD文件,比如:https://new.abb.com/products/robotics/zh/industrial-robots/irb-4600/irb-4600-cad
惯性参数获取问题,参见另一篇博客机械臂惯性参数的获取方法。
- MATLAB联合V-rep进行机械臂力矩控制仿真
切记: V-rep力矩控制时必须将仿真时间步设置为5ms与物理引擎同步,默认是50ms,参考官方文档说明。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-vzDsSbTP-1592535376092)(./pics_vrep/pics1_32.png)]
参考实现:
- V-rep关节类型与控制方式和代码实现:coppeliarobotics.com/helpFiles/en/jointDescription.htm#controller
- V-rep力矩控制实现:https://forum.coppeliarobotics.com/viewtopic.php?t=25
- https://blog.csdn.net/huangdianye/article/details/80628932
- 共享内存插件:https://github.com/santdiego/SASTools
- V-rep共享内存的使用:https://forum.coppeliarobotics.com/viewtopic.php?t=4157
需要将仿真周期设置为5ms,与物理引擎的时间步相同。 - MATLAB SIMULINK实时仿真插件:https://www.mathworks.com/matlabcentral/fileexchange/29107-real-time-pacer-for-simulink
- V-rep同步模式介绍:https://www.coppeliarobotics.com/helpFiles/en/remoteApiModusOperandi.htm#synchronous
-
双臂机器人抓取仿真
https://www.mathworks.com/help/robotics/examples/model-and-control-a-manipulator-arm-with-simscape.html -
MATLAB实时仿真
方法一: 使用这个模块实现与实际时间的同步:https://www.mathworks.com/matlabcentral/fileexchange/29107-real-time-pacer-for-simulink
方法二: 使用官方提供的实时模块Real-time sync, 不过在使用这个模块时需要安装Real-Time Kernel,然后重启电脑使Real-Time Kernel生效。
方法二使用官方例程时:open_system(fullfile(matlabroot,'toolbox','sldrt','sldrtexamples','sldrtex_vdp'));,出现如下错误:Error reported by S-function 'sldrtsync' in 'sldrtex_vdp/Real-Time Synchronization': Synchronization to real-time kernel has failed.
该问题在网上找到的解决办法:https://www.mathworks.com/matlabcentral/answers/434279-why-does-simulink-real-time-run-very-slow-in-matlab-r2018b-on-windows-and-a-real-time-synchronizati,但是尝试之后仍没有解决,甚至导致电脑蓝屏,暂且放弃方法二实现实时仿真。 -
MATLAB 物理建模与仿真
- MATLAB SIMSCAPE物理模型建立与仿真:通用型物理模型建模
- MATLAB Simscape Multibody:针对机械臂等机器人进行物理模型建模仿真
- Simscape Multibody Link:导入CAD软件3D模型至MATLAB进行物理建模
MATLAB Simscape Multibody常用模块作用: - Rigid Transform:坐标系之间的位姿变换,同时存在平移和旋转变换时,应该先平移再旋转
- Brick Solid:刚性立方体模型
- Mechanism Configuration block:可以指定整个系统的重力
初级例程:
- 构建一个简单的连杆模型>>>>从连杆构建单摆模型>>>>单摆运动分析
- 封闭运动链结构的建模
- 平面机械臂关节运动模型:6自由度关节模拟环境对末端的位移作用,实现力矩控制的末端轨迹跟踪
- 坐标变换模块的使用:先平移再旋转
- 接触力模块
- 根据末端轨迹自动算出关节期望力矩(类似逆动力学过程)
- 人形机器人仿真模型的建立:参考此例程实现双臂机器人模型的建立
- URDF文件导入SIMSCAPE对应生成的模型
高级例程:
- 机械臂建模与抓取实验的仿真:轨迹生成、控制器设计、动力学模型建立、接触模型的建立
- 关节空间轨迹跟踪仿真(代码形式实现仿真):不同的控制策略
-
MATLAB Simulink Data Inspector出现空白,无法显示图像的问题
使用Simulink.sdi.clearPreferences解决了上述问题。google查到的解决办法使用sdi.Repository.clearRepositoryFile没有任何效果。另附Simulink Data Inspector官方教程。 -
MATLAB Robotics System Toolbox的使用
常用函数文档:- 正运动学:getTransform
- 逆运动学:inverseKinematics,用法可以根据工具箱中源码文档确定,不同版本的MATLAB用法不同。
-
MATLAB Simulink生成C代码
参考博客:- 初级教程
- 官方讲座1
- 官方讲座2:在1小时20分30秒时讲解了如何将生成的代码集成到自己的项目中。
- 官方文档
-
6自由度机械臂动力学模型的推导和符号运算:https://github.com/aseleit/robotic_manipulator_dynamics
-
C联合V-rep仿真:机械臂力矩控制
- V-rep端需要使用
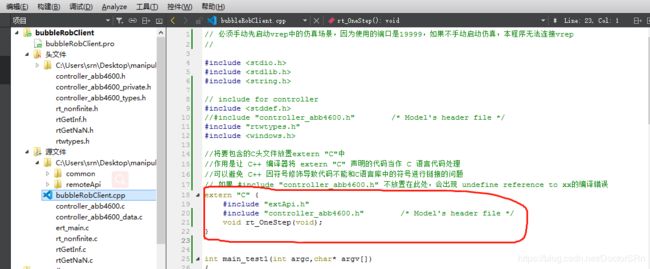
simRemoteApi.start(19999,1300,false,true)打开远程api接口,第四项参数很重要,当为true时才能开启同步模式。此处的portNumber不使用19997是因为端口19997是默认端口,工作在continuous remote API server service下,无法更改。 - 在Qtcreator中创建控制器C++程序,并添加MATLAB生成的控制器C代码。如图所示,由于主函数为CPP文件,所以添加的C函数和C头文件都要放在extern "C"中,否则就会出现undefine reference to xx的编译错误。
- V-rep端需要使用
-
V-rep启动多个RemoteAPI Server,从而可以在一个Client中使用多个thread连接V-rep的方法
当外部client程序一方面需要对V-rep中的机器人进行控制,另一方面需要定时获取机器人状态,这时候就需要多个thread和V-rep进行通讯,就产生了标题的需求。首先官方文档说V-rep是支持多个外部client同时连接的,关键点在于要在v-rep端开启不同port的server服务:

v-rep端开启不同port的server服务主要有以下两种方法: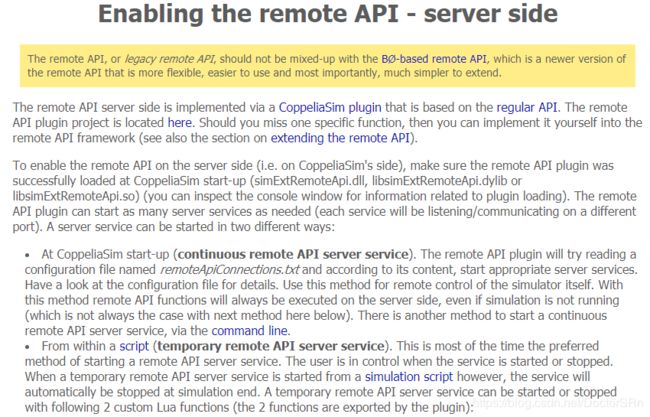
这里我使用第一种方法,直接修改V-rep根目录下的remoteApiConnections.txt文件,修改后的文件如下: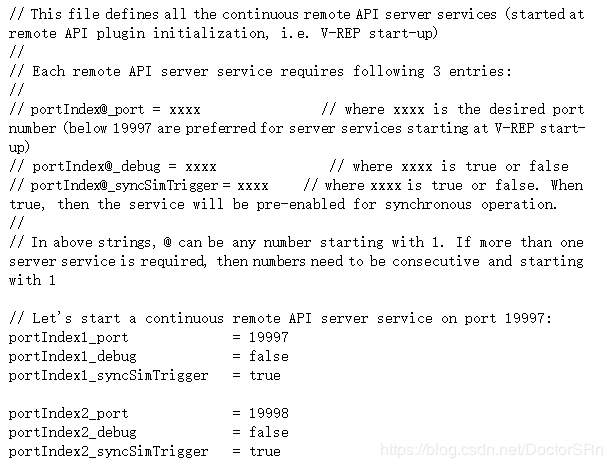
可以看到该文件注释部分也介绍了如何开启多个port,这里开启了19997和19998两个port,这个文件修改完成后启动V-rep,将完成对应port的server的开启,这样外部client程序就可以同时使用两个thread与V-rep进行通讯了。
在V-rep命令行中使用simRemoteApi.status()命令可以查看server端口是否开启成功:
可以看到19997和19998端口都已经成功开启。 -
V-rep中通过D-H参数自动生成机器人模型
D-H参考:- D-H参数生成三维模型: https://wenku.baidu.com/view/aaff395a52ea551811a68730.html
- D-H参数介绍: https://blog.csdn.net/pengjc2001/article/details/70156333
- abb4600标准型D-H参数: https://www.doc88.com/p-0478665844349.html
- abb4600改进型D-H参数: https://bulletin.incas.ro/files/apostolescu_savu_ion-guta_ionita__vol_11_iss_4.pdf