- 机器人学习的范式转变:从专用走向通用基础模型
XianxinMao
机器人
标题:机器人学习的范式转变:从专用走向通用基础模型文章信息摘要:机器人学习正经历从特定任务向通用基础模型的范式转变,这一演进路径与大语言模型相似。通过多机器人协作和跨任务泛化能力的成功,基础模型方向展现出实现通用人工智能的潜力。然而,这一转变面临两大关键挑战:机器人硬件的高昂成本限制了大规模部署和数据采集,以及获取足够规模和多样性的训练数据存在实际困难。突破这些瓶颈需要在制造工艺创新、数据共享生态
- Science Robotics最新封面:外骨骼“外挂”让手指弹奏钢琴更灵巧
xwz小王子
多模态变形金刚具身智能强化学习及自动驾驶外骨骼
最近来自日本的研究团队开发了一款专门的手部外骨骼机器人,通过被动训练的方式,帮助专业钢琴家突破了技能天花板。这项研究刚刚登上了机器人领域顶刊ScienceRobotics最新一期的封面。研究团队制作了一个精密的手部外骨骼系统。这个系统可以精确控制手指的弯曲和伸展,让钢琴家体验到比他们主动演奏更快速、更复杂的手指动作。系统的关键在于采用了“远程运动中心”机制,可以在高速重复运动时保持精确性,同时将手
- 刚体运动描述:欧拉角与四元数
FL17171314
算法
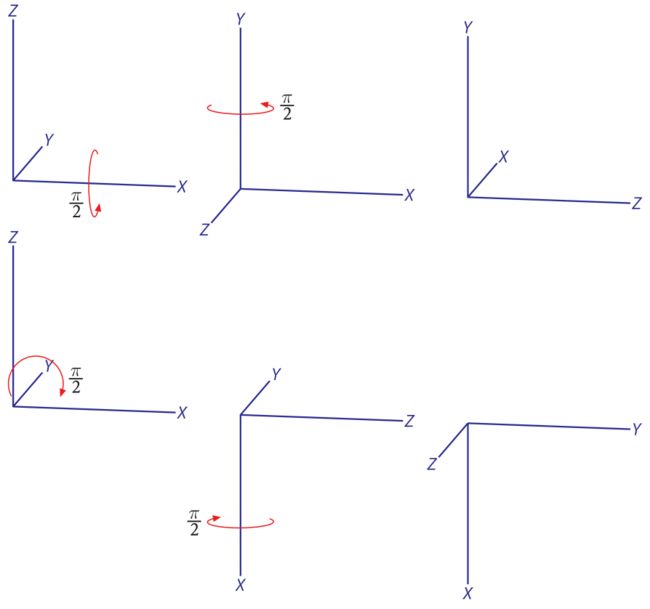
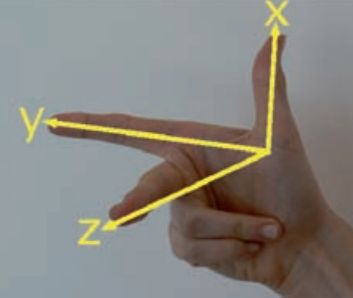
姿态角偏差主要有三种描述方式:欧拉角误差,轴角误差和四元数误差。在机器人学中,刚体的运动描述是非常重要的,特别是当我们需要精确控制机器人的姿态时。欧拉角和四元数是两种常用的描述刚体在三维空间中旋转的方法。下面将分别介绍这两种方法并给出其特点。欧拉角定义与特点:定义:欧拉角是通过绕一个三维坐标系的三个轴依次旋转来定义的,通常按照某个固定的旋转顺序(如XYZ、ZYX等)进行。表示:欧拉角由三个角度组成
- 【机器人工具箱Robotics Toolbox开发笔记(十三)】三自由度机器人圆弧轨迹规划仿真实例
DRobot
机器人工具箱RoboticsToolbox开发笔记机器人笔记
在实际应用场景中,我们通常预先明确了目标末端的运动轨迹,随后引导机器人进行相应的动作。本实例具体展示了如何基于给定的两个点,计算出末端的精确位姿,并以此为基础,进一步规划出一条平滑的圆弧轨迹供机器人执行。这样的流程确保了机器人能够沿着预定的路径,精准且高效地完成任务。matlab代码如下:clear;clc;%建立机器人模型%定义连杆的D-H参数%thetadaalphaoffsetL1=Link
- 四、使用MoveGroup C++接口——运动学(二)
阿白机器人
MoveIt2机器人运动规划c++
目录前言1.运动学插件(KinematicsPlugin)2.碰撞检测(CollisionChecking)3.碰撞对象(CollisionObjects)4.允许碰撞矩阵(AllowedCollisionMatrix,ACM)前言运动学是研究物体运动的几何属性而不涉及力或质量的科学。在机器人学中,运动学涉及到机器人的机械臂和关节如何运动。1.运动学插件(KinematicsPlugin)Move
- 【机器人工具箱Robotics Toolbox开发笔记(二)】Matlab中机器人工具箱的下载与安装
DRobot
机器人工具箱RoboticsToolbox开发笔记机器人笔记matlab
Matlab机器人工具箱(RoboticsToolbox)可从PeterCorke教授提供的网站上免费下载。网址为:http://www.petercorke.com/Robotics_Toolbox.html。图1网站所提供的机器人工具箱版本在DownloadingtheToolbox栏目中单击here按钮进入下载页面,然后在该页面中填写国家、组织和身份等信息,进入机器人工具箱的下载页面。如图1
- 【机器人工具箱Robotics Toolbox开发笔记(六)】 机器人运动学简要介绍
DRobot
机器人工具箱RoboticsToolbox开发笔记机器人笔记
机器人本体,是机器人赖以完成作业任务的执行机构,一般是一台机器人,也称为机器人或操作手,可以在确定的环境中执行控制系统指定的操作。典型工业机器人本体一般由手部(末端执行器)、腕部、臂部、腰部和基座组成。机器人多采用关节式机械结构,一般具有6自由度,其中3个用来确定末端执行器的位置,另外3个则用来确定末端执行装置的方向(姿态)。机器人末端执行装置可以根据操作需要换成焊枪、吸盘、扳手等作业工具。运动学
- 【机器人工具箱Robotics Toolbox开发笔记(十四)】三连杆机器人直线轨迹规划仿真实例
DRobot
机器人工具箱RoboticsToolbox开发笔记机器人笔记机器学习
在实际应用场景中,我们通常采用逆向思维方法,即首先明确目标末端的直线运动轨迹,随后据此指导机器人的动作执行。本文所展示的案例,正是通过给定两个点的坐标值,首先计算出末端执行器的目标位姿,随后基于这一精确的位姿信息,进一步规划并生成直线运动轨迹,以确保机器人能够准确无误地完成预定任务。本案例代码使用了机器人工具箱RoboticsToolbox来演示一个简单的机器人运动规划过程。下面是对代码的详细解析
- 【机器人工具箱Robotics Toolbox开发笔记(一)】Matlab机器人工具箱简介
DRobot
机器人工具箱RoboticsToolbox开发笔记机器人笔记matlab
MATLAB是一款被广泛应用于科学计算和工程领域的专业软件。它的全称为MatrixLaboratory(矩阵实验室),因为其最基本的数据类型就是矢量与矩阵,所以在处理数学和科学问题时非常方便,可用于线性代数计算、图形和动态仿真的高级技术计算语言和交互式环境以及解决机器人学的相关问题。MATLAB的RoboticsToolbox(简称RTB)是一款在MATLAB环境下进行机器人建模、仿真和控制的工具
- Python知识点:如何使用Python实现强化学习机器人
杰哥在此
Python系列python机器人开发语言编程面试
实现一个强化学习机器人涉及多个步骤,包括定义环境、状态和动作,选择适当的强化学习算法,并训练模型。下面是一个简单的例子,使用Python和经典的Q-learning算法来实现一个强化学习机器人,目标是通过OpenAIGym提供的FrozenLake环境训练机器人学会如何在冰面上移动以找到目标。1.安装必要的库首先,需要安装OpenAIGym和Numpy。你可以使用以下命令安装它们:pipinsta
- IROS2021投稿说明
计算机视觉-Archer
IROSIntro,VenueandThemeTheIEEE/RSJInternationalConferenceonIntelligentRobotsandSystems(IROS)isapremierflagshipacademicconferenceinrobotics.Forover30-years,IROShasshowcasedleading-edgeresearch.Inhindsi
- MATLAB机器人常用代码程序(以UR5e机器人为例)
FL17171314
机器人
需要一个UR5e的机器人模型。MATLAB的RoboticsToolbox或者RoboticsSystemToolbox提供了创建和模拟机器人模型的功能。UR5e=importrobot('universalUR5e.urdf');show(UR5e)showdetails(UR5e)figure(Name="InteractiveGUI")gui=interactiveRigidBodyTree
- 总融资超8700万美元,日均互动超30次,ElliQ如何以AI陪伴机器人驱动,重塑养老格局?
AgeClub
人工智能机器人银发产业热点
干货抢先看1.IntuitionRobotics公司自主研发的ElliQ机器人,深度集成了生成式人工智能技术,为老年用户提供个性化、贴心的陪伴服务,深受用户喜爱。2.该公司新一轮融资金额高达2500万美元,将用于进一步加强AI技术研发、扩大生产规模并加速市场推广,以满足全球范围内老年人对智能陪伴的迫切需求。3.ElliQ及其他陪伴式机器人在满足老年人情感需求、提升生活质量方面具有显著优势,其市场潜
- Apple Explores Robotics in Search of Life Beyond the iPhone
S0linteeH
iphoneios
Appleisexploringapushintorobotics—bothtogainafootholdinconsumers’homesandaddanewdimensiontoitsproductlineup.Also:MetanearsthelaunchofacheaperQuest;AppletriesanewVisionProsalestactic;andtheAppStorechie
- 【EI会议征稿通知】第六届机器人与智能制造技术国际会议 (ISRIMT 2024)
搞科研的小刘选手
学术会议制造人工智能搜索引擎机器人云计算深度学习大数据
第六届机器人与智能制造技术国际会议(ISRIMT2024)20246thInternationalSymposiumonRobotics&IntelligentManufacturingTechnology第六届机器人与智能制造技术国际会议(ISRIMT2024)定于2024年9月20-22日在常州隆重举行。会议主要围绕“机器人”、“智能制造技术”等研究领域展开讨论,旨在为机器人与智能制造技术等领
- 从运动学到机械臂控制学习(优质网址记录,实时更新)
学机械的鱼鱼
MATLAB机器人计算与应用机器人仿真学习matlab矩阵
基础知识:位姿矩阵【古月居】从RP关节入门机器人学https://mp.weixin.qq.com/s/xc6tcW6QlSoTXmlfHUqGsw【古月居】位置角度平移旋转,“乱七八糟”的坐标变换https://mp.weixin.qq.com/s/FE8xa1JV92_0xpUZug19aw【古月居】机械臂的坐标系与数学模型:传说中的DH参数https://mp.weixin.qq.com/s
- 在ubuntu20.04上配置VINS_Fusion(亲测有效,一应俱全)
Waygoer
vins_fusionubuntulinux运维
最近在做科研训练的时候配置了HKUST-Aerial-Robotics实验室的VINS_Fusion代码项目,经历了一些编译报错的问题,在网上查找的时候博客内容良莠不齐,且实质针对性意见不多,于是在此记录下自己配置期间遇到的一些共性问题,留作自己日后参考和大家的交流学习。github网站传送门->https://github.com/HKUST-Aerial-Robotics/VINS-Fusio
- 机器人专题:智能机器人技术产业发展白皮书(2023)
科技挖掘猫
机器人
今天分享的是人工智能系列深度研究报告:《机器人专题:智能机器人技术产业发展白皮书(2023)》。(报告出品方:中国信息通信研究院)报告共计:82页智能机器人行业发展综述机器人的概念内涵对于机器人的定义,不同机构给予了不同解释。国际标准化组织(ISO)对机器人的定义为:具有一定程度的自主能力的可编程执行机构,能进行运动、操纵或定位(8373:2021Robotics–Vocabulary)。而我国发
- 反无人机系统技术分析,无人机反制技术理论基础,无人机技术详解
创小董
无人机技术无人机
近年来,经过大疆、parrot、3drobotics等公司不断的努力,具有强大功能的消费级无人机价格不断降低,操作简便性不断提高,无人机正快速地从尖端的军用设备转入大众市场,成为普通民众手中的玩具。然而,随着消费级无人机市场的快速增长,功能越来越先进的新式无人机的不断涌现,也带来了安全和隐私方面的忧患。美国曾发生过业余无人机操作员操作无人机飞入白宫引发恐慌;英国也发生过不法分子通过无人机为监狱内的
- 【AI视野·今日Robot 机器人论文速览 第七十九期】Thu, 18 Jan 2024
hitrjj
人形机器人触觉Papers人工智能机器人声学软体机器人导航多机器人协同触觉感知控制
AI视野·今日CS.Robotics机器人学论文速览Thu,18Jan2024Totally43papers上期速览✈更多精彩请移步主页DailyRoboticsPapersCognitiveDog:LargeMultimodalModelBasedSystemtoTranslateVisionandLanguageintoActionofQuadrupedRobotAuthorsArtemLyk
- 机器人学中的数值优化(一)
Big David
数值优化数值优化
Preliminaries0前言最优解x∗x^{*}x∗在满足约束的所有向量中具有最小值。两个基本的假设:(1)目标函数有下界目标函数不能存在负无穷的值,这样会使得最小值无法在计算机中用浮点数表示,最小值可以很小但必须有界(2)目标函数具有有界子区间映射sub-levelsets就是下水平集,此时要求目标函数不能存在当x趋于无穷时函数趋于某个值即下水平集无界,这同样会导致最小值无法用浮点数表示f,
- 【机器人理论 Robotics】【工作空间概述(Robotic Work Cell)】【新加坡南洋理工大学(Nanyang Technological University)】
不是AI
大宗技术英文干货机器人
重要说明ImportantNotice:个人资料,仅供学习、参考使用,一切版权归校方所有。Slide109:Notesforslide109:Slide110:Notesforslide110:Slide111:Notesforslide111:Slide112:Notesforslide112:
- 机器人学、机器视觉与控制 上机笔记(2.1章节)
Norach
机器人学机器视觉与控制笔记算法matlab机器人经验分享
机器人学、机器视觉与控制上机笔记(2.1章节)1、前言2、本篇内容3、代码记录3.1、新建se23.2、生成坐标系3.3、将T1表示的变换绘制3.4、完整绘制代码3.5、获取点`*`在坐标系1下的表示3.6、相对坐标获取完整代码4、结语1、前言工作需要,想同时显示出六轴协作臂,一组位姿信息逆解出的八组关节角的效果情况。就想使用MATLAB的机器人工具箱RTB去实现这一需求,辅助数据分析。朋友推荐了
- 06 逆矩阵、列空间与零空间
林炒Lynn
06逆矩阵、列空间与零空间imageimage直观理解这几个概念,计算方法不作讨论,如"Gaussianelimination高斯消元法"和"rowechelonform行阶梯型".Letthecomputerdocomputing!Usefulnessofmatrices矩阵的用途计算机图形学机器人学被广泛应用的一个主要原因就是它能帮助我们求解特定的systemofequations方程组大部分
- 环境配置:Ubuntu18.04 ROS Melodic安装
马上到我碗里来
科研工具ROSUbuntuMelodic环境配置
前言不同版本的Ubuntu与ROS存在对应关系。ROS作为目前最受欢迎的机器人操作系统,其核心代码采用C++编写,并以BSD许可发布。ROS起源于2007年,是由斯坦福大学与机器人技术公司WillowGarage合作的Switchyard项目。2012年,ROS团队从WillowGarage独立出来,成立了一家非营利组织——开源机器人基金会(OpenSourceRoboticsFoundation
- python 机器人工具箱——robotics-toolbox-python
FL17171314
python开发语言
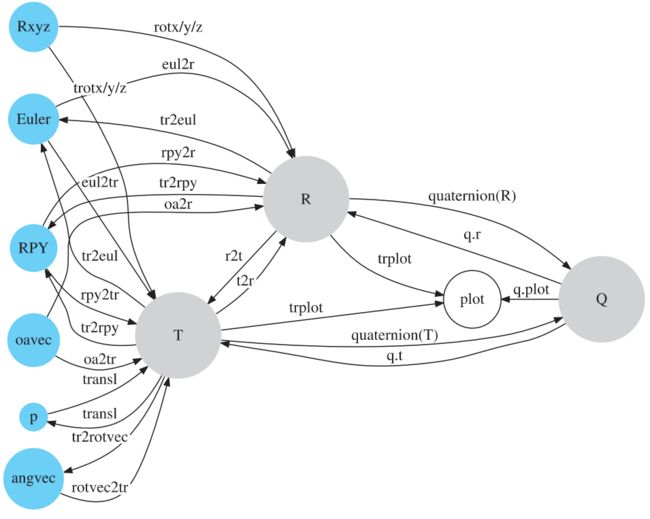
这个工具箱为Python带来了机器人特定的功能,并利用Python的可移植性、普遍性和支持性的优势,以及线性代数(numpy、scipy)、图形(matplotlib、three.js、WebGL)的开源生态系统的能力,交互式开发(jupyter、jupyterlab、mybinder.org)和文档(sphinx)。python-mpipinstall--usernumpyscipymatplo
- 我的AI之路(32)--Ubuntu下设置开机自启动ROS节点
Arnold-FY-Chen
ROSUbuntuLinuxROSUbunturc.localrobot_upstart
至少有两种途径,一种是使用ROS提供的功能包,一种自然是借助Ubuntu自身的启动机制。ROS提供了robot_upstart包http://wiki.ros.org/robot_upstart(源码:https://github.com/clearpathrobotics/robot_upstart)可以用来设置开机自启动程序(通过把roslaunch文件安装到service里去),首先安装这个
- Matlab之Robotics Toolbox工具箱
kissgoodbye2012
MatlabMatlab机器人工具箱Robotics关节空间定义p560
我的Matlab版本:R2016a1.默认p560关节空间的定义1.1关节空间都为0First_Theta=[000000];p560.plot(First_Theta);%显示机器人的图像1.2关节空间绕不同关节旋转First_Theta=[000000];fori=1:720First_Theta(6)=i;p560.plot(First_Theta);%显示机器人的图像pause(0.5);
- 【具身智能/自主导航】相关开源项目代码、论文收集
我才是一卓
人工智能
1.代码集合Awesome-LLM-Robotics:https://github.com/GT-RIPL/Awesome-LLM-RoboticsEverything-LLMs-And-Robotics:https://github.com/jrin771/Everything-LLMs-And-RoboticsAwesomeLLM-PoweredAgent:https://github.com
- 革新智能机器人训练工具
Zhi non
机器人人工智能
目录莫拉维克悖论EurekaHabitat3.0大语言模型零样本学习Zero-ShotLearningHumanFeedbackMETA发布的HABITAT3.0Habitat3.0提供了三个方面的贡献莫拉维克悖论莫拉维克悖论是由人工智能和机器人学者所发现的一个和常识相佐的现象。和传统假设不同,人类所独有的高阶智慧能力只需要非常少的计算能力,例如推理,但是无意识的技能和直觉却需要极大的运算能力。这
- LeetCode[Math] - #66 Plus One
Cwind
javaLeetCode题解AlgorithmMath
原题链接:#66 Plus One
要求:
给定一个用数字数组表示的非负整数,如num1 = {1, 2, 3, 9}, num2 = {9, 9}等,给这个数加上1。
注意:
1. 数字的较高位存在数组的头上,即num1表示数字1239
2. 每一位(数组中的每个元素)的取值范围为0~9
难度:简单
分析:
题目比较简单,只须从数组
- JQuery中$.ajax()方法参数详解
AILIKES
JavaScriptjsonpjqueryAjaxjson
url: 要求为String类型的参数,(默认为当前页地址)发送请求的地址。
type: 要求为String类型的参数,请求方式(post或get)默认为get。注意其他http请求方法,例如put和 delete也可以使用,但仅部分浏览器支持。
timeout: 要求为Number类型的参数,设置请求超时时间(毫秒)。此设置将覆盖$.ajaxSetup()方法的全局
- JConsole & JVisualVM远程监视Webphere服务器JVM
Kai_Ge
JVisualVMJConsoleWebphere
JConsole是JDK里自带的一个工具,可以监测Java程序运行时所有对象的申请、释放等动作,将内存管理的所有信息进行统计、分析、可视化。我们可以根据这些信息判断程序是否有内存泄漏问题。
使用JConsole工具来分析WAS的JVM问题,需要进行相关的配置。
首先我们看WAS服务器端的配置.
1、登录was控制台https://10.4.119.18
- 自定义annotation
120153216
annotation
Java annotation 自定义注释@interface的用法 一、什么是注释
说起注释,得先提一提什么是元数据(metadata)。所谓元数据就是数据的数据。也就是说,元数据是描述数据的。就象数据表中的字段一样,每个字段描述了这个字段下的数据的含义。而J2SE5.0中提供的注释就是java源代码的元数据,也就是说注释是描述java源
- CentOS 5/6.X 使用 EPEL YUM源
2002wmj
centos
CentOS 6.X 安装使用EPEL YUM源1. 查看操作系统版本[root@node1 ~]# uname -a Linux node1.test.com 2.6.32-358.el6.x86_64 #1 SMP Fri Feb 22 00:31:26 UTC 2013 x86_64 x86_64 x86_64 GNU/Linux [root@node1 ~]#
- 在SQLSERVER中查找缺失和无用的索引SQL
357029540
SQL Server
--缺失的索引
SELECT avg_total_user_cost * avg_user_impact * ( user_scans + user_seeks ) AS PossibleImprovement ,
last_user_seek ,
- Spring3 MVC 笔记(二) —json+rest优化
7454103
Spring3 MVC
接上次的 spring mvc 注解的一些详细信息!
其实也是一些个人的学习笔记 呵呵!
- 替换“\”的时候报错Unexpected internal error near index 1 \ ^
adminjun
java“\替换”
发现还是有些东西没有刻子脑子里,,过段时间就没什么概念了,所以贴出来...以免再忘...
在拆分字符串时遇到通过 \ 来拆分,可是用所以想通过转义 \\ 来拆分的时候会报异常
public class Main {
/*
- POJ 1035 Spell checker(哈希表)
aijuans
暴力求解--哈希表
/*
题意:输入字典,然后输入单词,判断字典中是否出现过该单词,或者是否进行删除、添加、替换操作,如果是,则输出对应的字典中的单词
要求按照输入时候的排名输出
题解:建立两个哈希表。一个存储字典和输入字典中单词的排名,一个进行最后输出的判重
*/
#include <iostream>
//#define
using namespace std;
const int HASH =
- 通过原型实现javascript Array的去重、最大值和最小值
ayaoxinchao
JavaScriptarrayprototype
用原型函数(prototype)可以定义一些很方便的自定义函数,实现各种自定义功能。本次主要是实现了Array的去重、获取最大值和最小值。
实现代码如下:
<script type="text/javascript">
Array.prototype.unique = function() {
var a = {};
var le
- UIWebView实现https双向认证请求
bewithme
UIWebViewhttpsObjective-C
什么是HTTPS双向认证我已在先前的博文 ASIHTTPRequest实现https双向认证请求
中有讲述,不理解的读者可以先复习一下。本文是用UIWebView来实现对需要客户端证书验证的服务请求,网上有些文章中有涉及到此内容,但都只言片语,没有讲完全,更没有完整的代码,让人困扰不已。但是此知
- NoSQL数据库之Redis数据库管理(Redis高级应用之事务处理、持久化操作、pub_sub、虚拟内存)
bijian1013
redis数据库NoSQL
3.事务处理
Redis对事务的支持目前不比较简单。Redis只能保证一个client发起的事务中的命令可以连续的执行,而中间不会插入其他client的命令。当一个client在一个连接中发出multi命令时,这个连接会进入一个事务上下文,该连接后续的命令不会立即执行,而是先放到一个队列中,当执行exec命令时,redis会顺序的执行队列中
- 各数据库分页sql备忘
bingyingao
oraclesql分页
ORACLE
下面这个效率很低
SELECT * FROM ( SELECT A.*, ROWNUM RN FROM (SELECT * FROM IPAY_RCD_FS_RETURN order by id desc) A ) WHERE RN <20;
下面这个效率很高
SELECT A.*, ROWNUM RN FROM (SELECT * FROM IPAY_RCD_
- 【Scala七】Scala核心一:函数
bit1129
scala
1. 如果函数体只有一行代码,则可以不用写{},比如
def print(x: Int) = println(x)
一行上的多条语句用分号隔开,则只有第一句属于方法体,例如
def printWithValue(x: Int) : String= println(x); "ABC"
上面的代码报错,因为,printWithValue的方法
- 了解GHC的factorial编译过程
bookjovi
haskell
GHC相对其他主流语言的编译器或解释器还是比较复杂的,一部分原因是haskell本身的设计就不易于实现compiler,如lazy特性,static typed,类型推导等。
关于GHC的内部实现有篇文章说的挺好,这里,文中在RTS一节中详细说了haskell的concurrent实现,里面提到了green thread,如果熟悉Go语言的话就会发现,ghc的concurrent实现和Go有点类
- Java-Collections Framework学习与总结-LinkedHashMap
BrokenDreams
LinkedHashMap
前面总结了java.util.HashMap,了解了其内部由散列表实现,每个桶内是一个单向链表。那有没有双向链表的实现呢?双向链表的实现会具备什么特性呢?来看一下HashMap的一个子类——java.util.LinkedHashMap。
- 读《研磨设计模式》-代码笔记-抽象工厂模式-Abstract Factory
bylijinnan
abstract
声明: 本文只为方便我个人查阅和理解,详细的分析以及源代码请移步 原作者的博客http://chjavach.iteye.com/
package design.pattern;
/*
* Abstract Factory Pattern
* 抽象工厂模式的目的是:
* 通过在抽象工厂里面定义一组产品接口,方便地切换“产品簇”
* 这些接口是相关或者相依赖的
- 压暗面部高光
cherishLC
PS
方法一、压暗高光&重新着色
当皮肤很油又使用闪光灯时,很容易在面部形成高光区域。
下面讲一下我今天处理高光区域的心得:
皮肤可以分为纹理和色彩两个属性。其中纹理主要由亮度通道(Lab模式的L通道)决定,色彩则由a、b通道确定。
处理思路为在保持高光区域纹理的情况下,对高光区域着色。具体步骤为:降低高光区域的整体的亮度,再进行着色。
如果想简化步骤,可以只进行着色(参看下面的步骤1
- Java VisualVM监控远程JVM
crabdave
visualvm
Java VisualVM监控远程JVM
JDK1.6开始自带的VisualVM就是不错的监控工具.
这个工具就在JAVA_HOME\bin\目录下的jvisualvm.exe, 双击这个文件就能看到界面
通过JMX连接远程机器, 需要经过下面的配置:
1. 修改远程机器JDK配置文件 (我这里远程机器是linux).
- Saiku去掉登录模块
daizj
saiku登录olapBI
1、修改applicationContext-saiku-webapp.xml
<security:intercept-url pattern="/rest/**" access="IS_AUTHENTICATED_ANONYMOUSLY" />
<security:intercept-url pattern=&qu
- 浅析 Flex中的Focus
dsjt
htmlFlexFlash
关键字:focus、 setFocus、 IFocusManager、KeyboardEvent
焦点、设置焦点、获得焦点、键盘事件
一、无焦点的困扰——组件监听不到键盘事件
原因:只有获得焦点的组件(确切说是InteractiveObject)才能监听到键盘事件的目标阶段;键盘事件(flash.events.KeyboardEvent)参与冒泡阶段,所以焦点组件的父项(以及它爸
- Yii全局函数使用
dcj3sjt126com
yii
由于YII致力于完美的整合第三方库,它并没有定义任何全局函数。yii中的每一个应用都需要全类别和对象范围。例如,Yii::app()->user;Yii::app()->params['name'];等等。我们可以自行设定全局函数,使得代码看起来更加简洁易用。(原文地址)
我们可以保存在globals.php在protected目录下。然后,在入口脚本index.php的,我们包括在
- 设计模式之单例模式二(解决无序写入的问题)
come_for_dream
单例模式volatile乱序执行双重检验锁
在上篇文章中我们使用了双重检验锁的方式避免懒汉式单例模式下由于多线程造成的实例被多次创建的问题,但是因为由于JVM为了使得处理器内部的运算单元能充分利用,处理器可能会对输入代码进行乱序执行(Out Of Order Execute)优化,处理器会在计算之后将乱序执行的结果进行重组,保证该
- 程序员从初级到高级的蜕变
gcq511120594
框架工作PHPandroidhtml5
软件开发是一个奇怪的行业,市场远远供不应求。这是一个已经存在多年的问题,而且随着时间的流逝,愈演愈烈。
我们严重缺乏能够满足需求的人才。这个行业相当年轻。大多数软件项目是失败的。几乎所有的项目都会超出预算。我们解决问题的最佳指导方针可以归结为——“用一些通用方法去解决问题,当然这些方法常常不管用,于是,唯一能做的就是不断地尝试,逐个看看是否奏效”。
现在我们把淫浸代码时间超过3年的开发人员称为
- Reverse Linked List
hcx2013
list
Reverse a singly linked list.
/**
* Definition for singly-linked list.
* public class ListNode {
* int val;
* ListNode next;
* ListNode(int x) { val = x; }
* }
*/
p
- Spring4.1新特性——数据库集成测试
jinnianshilongnian
spring 4.1
目录
Spring4.1新特性——综述
Spring4.1新特性——Spring核心部分及其他
Spring4.1新特性——Spring缓存框架增强
Spring4.1新特性——异步调用和事件机制的异常处理
Spring4.1新特性——数据库集成测试脚本初始化
Spring4.1新特性——Spring MVC增强
Spring4.1新特性——页面自动化测试框架Spring MVC T
- C# Ajax上传图片同时生成微缩图(附Demo)
liyonghui160com
1.Ajax无刷新上传图片,详情请阅我的这篇文章。(jquery + c# ashx)
2.C#位图处理 System.Drawing。
3.最新demo支持IE7,IE8,Fir
- Java list三种遍历方法性能比较
pda158
java
从c/c++语言转向java开发,学习java语言list遍历的三种方法,顺便测试各种遍历方法的性能,测试方法为在ArrayList中插入1千万条记录,然后遍历ArrayList,发现了一个奇怪的现象,测试代码例如以下:
package com.hisense.tiger.list;
import java.util.ArrayList;
import java.util.Iterator;
- 300个涵盖IT各方面的免费资源(上)——商业与市场篇
shoothao
seo商业与市场IT资源免费资源
A.网站模板+logo+服务器主机+发票生成
HTML5 UP:响应式的HTML5和CSS3网站模板。
Bootswatch:免费的Bootstrap主题。
Templated:收集了845个免费的CSS和HTML5网站模板。
Wordpress.org|Wordpress.com:可免费创建你的新网站。
Strikingly:关注领域中免费无限的移动优
- localStorage、sessionStorage
uule
localStorage
W3School 例子
HTML5 提供了两种在客户端存储数据的新方法:
localStorage - 没有时间限制的数据存储
sessionStorage - 针对一个 session 的数据存储
之前,这些都是由 cookie 完成的。但是 cookie 不适合大量数据的存储,因为它们由每个对服务器的请求来传递,这使得 cookie 速度很慢而且效率也不