深入浅出了解最小二乘法及其应用
无论是使用线性拟合还是非线性拟合,最小二乘法都是使用它们的基础。关于最小二乘法的数学原理可以给出很多很好的解释,比如可以直接使用多元函数极值的观点,也可以使用线性代数中向量到子空间距离的观点。因为第二种方法比较直观,所以我将用第二种方法来描述最小二乘法这样显得更加直观易懂,而用第一种方法来进行验证。
1、线性代数方法的描述
为了表述方便,这里进行一些符号的说明,如下图所示:
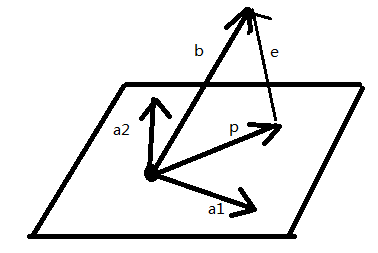 图1
图1
(1) A=[a1, a2]
(2) p是基向量a1,a2的组合p=x1'a1+x2'a2=Ax'
(3) e=b-p
2.数学模型(At即为A的转置,x'为x拔)
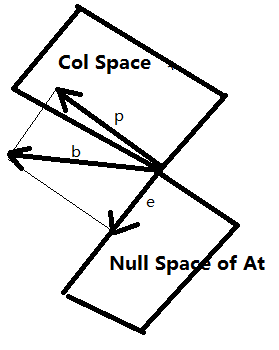 图2
图2
如上图2所示我们解非线性齐次方程Ax=b,显然向量b并不在A的列空间(Col Space)中,即我们无法用A的列向量或是它们的线性组合来表示b,也就是该方程无解。
虽然我们无法对上面的方程求解x,但是我们可以求其最优解(最近似解)x',由上图2我们可以看出b在Col Space上的投影p是A的列空间可以表示的最接近的向量。
下面我们进行下数学描述:
(1) 令p=Ax',由图1的正交性可以得出,a1t(b-Ax')=0,a2t(b-Ax')=0
(2) [a1t ; a2t](b-Ax')=0 即At(b-Ax')=0
(3) 整理(2)式得AtAx'=Atb --最小二乘法核心公式
(4) x'=(AtA) \ Atb --这里为Matlab写法
对(3)进行下简单说明,本来Ax=b是无解的,但是通过对方程两边左乘At,我们可以得到最优解x‘。
3. 一个实例
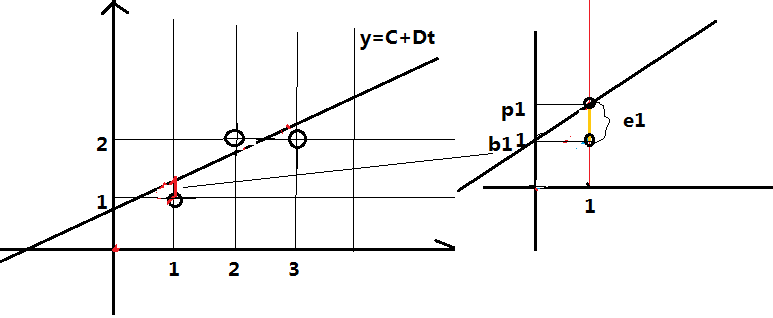 图2
图2
求Ax=b的最优解
(1) 绘出一条直接y=C+Dt来拟合图上的三个点(1,1),(2,2),(3,2)
(2) C+D=1,C+2D=2,C+3D=2 =>[1 1 ; 1 2 ; 1 3][C ; D]=[1 ; 2 ; 2]
(3) 求解最优解x’=[C' ; D']
AtAx'=Atb => AtAx'=[1 1 1;1 2 3] [1 1 ; 1 2 ; 1 3][C' ; D']=[3C' 6D' ; 6C' 14D']
Atb=[1 1 1;1 2 3][1;2;2]=[5;11]
因此3C'+6D'=5
6C'+14D'=11
=>C'=2/3 D'=1/2 即所求拟合曲线为y=2/3+1/2t
4. 多元函数极值验证
这里对3进行验证,由图2,既然是最优解
(1) 使得||Ax-b||^2最小,即||Ax-b||^2=||e||^2=0
(2) 即使e1^2+e2^2+e3^2=f(C,D)(C+D-1)^2+(C+2D-2)^2+(C+3D-2)^2=0
(3) 求C,D使得f(C,D)=0,因此对f分别对C,D求偏导等于0,同样得到3C+6D=5,6C+14D=11,证毕。
5. 编写一个Matlab程序来理解最小二乘法的线性与非线性拟合
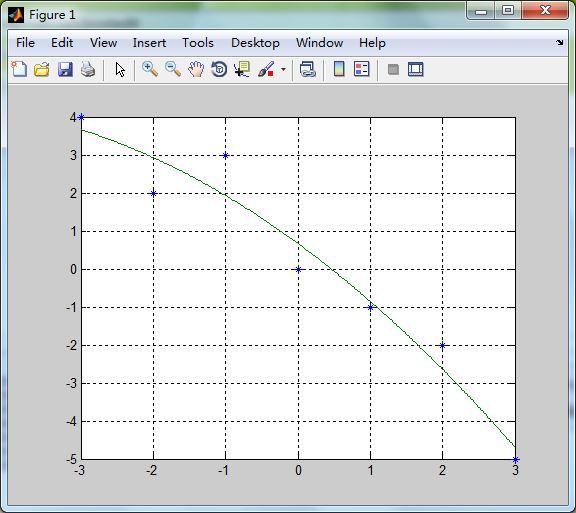
求数据
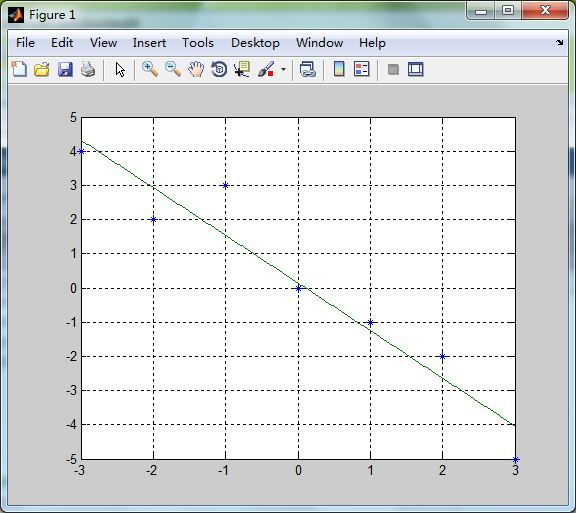
| x | -3 | -2 | -1 | 0 | 1 | 2 | 3 |
| y | 4 | 2 | 3 | 0 | -1 | -2 | -5 |
(1) 用y=a0+a1*x+a2*x^2拟合
%最小二乘拟合的主函数
clear
x=[-3 -2 -1 0 1 2 3]';
y=[4 2 3 0 -1 -2 -5]';
% 得到线性方程的系数矩阵
a=[
zx_nh_f(x(1))
zx_nh_f(x(2))
zx_nh_f(x(3))
zx_nh_f(x(4))
zx_nh_f(x(5))
zx_nh_f(x(6))
zx_nh_f(x(7))
];
b=y;
A=a'*a;
B=a'*b;
c=A\B
%得到拟合函数
x_n=-3:0.02:3;
y_n=c(1)*1+c(2)*x_n+c(3)*x_n.^2;
plot(x,y,'*',x_n,y_n)
gridfunction f = zx_nh_f( x ) %子函数zx_nh_f
%ZX_NH_F Summary of this function goes here
% Detailed explanation goes here
f(1)=1;
f(2)=x;
f(3)=x^2;
end
c =
0.6667
-1.3929
-0.1310
(2) 用y=a0+a1*x拟合
主函数和子函数稍作变化
y_n=c(1)*1+c(2)*x_n; %主函数%f(3)=x^2; %删掉
引用:
《MATLAB数值分析与应用_宋叶志》