VINS-Mono运行与评测
VINS-Mono运行与评测
- 1 修改VINS-mono轨迹保存代码
-
- 1.1 修改 visualization.cpp
- 1.2 修改 pose_graph.cpp
- 1.3 修改VINS-mono运行参数
- 2 EVO 显示轨迹
-
- 2.1 分析单条轨迹
- 2.2 分析多条轨迹
- 3 EUROC数据集测试
-
- 3.1 定位精度
- 3.2 计算时间
- 参考资料
由于VINS-Mono保存的轨迹格式与EVO所使用的格式不同,VISNmono输出的轨迹格式不符合tum数据集和euroc数据集的格式。因此需要对源代码就行修改,更改保存轨迹的格式。(如果只有一条轨迹也可以直接需要输出的csv文件,但是如果要反复评估一个算法的话,比如运行10次求平均值,这样还是修改源代码方便一点)
1 修改VINS-mono轨迹保存代码
修改下列两个文件,共计3个地方
- vins_estimator/src/utility/visualization.cpp
- pose_graph/src/pose_graph.cpp
1.1 修改 visualization.cpp
找到以下代码段
// write result to file
ofstream foutC(VINS_RESULT_PATH, ios::app);
foutC.setf(ios::fixed, ios::floatfield);
foutC.precision(0);
foutC << header.stamp.toSec() * 1e9 << ",";
foutC.precision(5);
foutC << estimator.Ps[WINDOW_SIZE].x() << ","
<< estimator.Ps[WINDOW_SIZE].y() << ","
<< estimator.Ps[WINDOW_SIZE].z() << ","
<< tmp_Q.w() << ","
<< tmp_Q.x() << ","
<< tmp_Q.y() << ","
<< tmp_Q.z() << ","
<< estimator.Vs[WINDOW_SIZE].x() << ","
<< estimator.Vs[WINDOW_SIZE].y() << ","
<< estimator.Vs[WINDOW_SIZE].z() << "," << endl;
修改为以下代码

1.2 修改 pose_graph.cpp
1) 在路径 VINS-Mono-Modify/pose_graph/src/pose_graph.cpp 在函数 addKeyFrame() 中 找到以下代码段
if (SAVE_LOOP_PATH)
{
ofstream loop_path_file(VINS_RESULT_PATH, ios::app);
loop_path_file.setf(ios::fixed, ios::floatfield);
loop_path_file.precision(0);
loop_path_file << cur_kf->time_stamp * 1e9 << ",";
loop_path_file.precision(5);
loop_path_file << P.x() << ","
<< P.y() << ","
<< P.z() << ","
<< Q.w() << ","
<< Q.x() << ","
<< Q.y() << ","
<< Q.z() << ","
<< endl;
loop_path_file.close();
}

2) 在路径 VINS-Mono-Modify/pose_graph/src/pose_graph.cpp 在函数 updatePath() 中 找到以下代码段
if (SAVE_LOOP_PATH)
{
ofstream loop_path_file(VINS_RESULT_PATH, ios::app);
loop_path_file.setf(ios::fixed, ios::floatfield);
loop_path_file.precision(0);
loop_path_file << (*it)->time_stamp * 1e9 << ",";
loop_path_file.precision(5);
loop_path_file << P.x() << ","
<< P.y() << ","
<< P.z() << ","
<< Q.w() << ","
<< Q.x() << ","
<< Q.y() << ","
<< Q.z() << ","
<< endl;
loop_path_file.close();
}
修改为:

1.3 修改VINS-mono运行参数
在路径 VINS-Mono/config/euroc 下有配置文件 euroc_config.yaml
output_path: 设置轨迹保存位置
pose_graph_save_path 设置位姿图保存位置
loop_closure: 0 表示不使用回环 1表示使用回环
estimate_td: 0表示不估计传感器之间的延时 1表示启动
2 EVO 显示轨迹
EVO的安装可以参考我之前的博客 SLAM 轨迹评估工具EVO
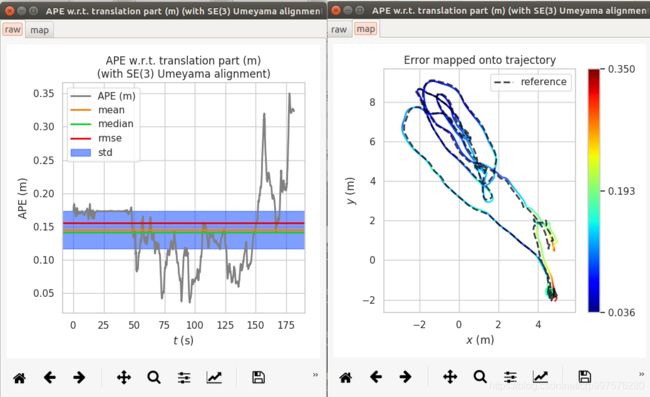
2.1 分析单条轨迹
evo_ape euroc ../groundturth_euroc/MH_01_easy/state_groundtruth_estimate0/data.csv vinsmono_noloop_euroc_MH01_01.csv -va --plot --plot_mode xy --save_results results/VINS_Mono_Noloop_MH01_01
其中:
- 轨迹的真值:…/groundturth_euroc/MH_01_easy/state_groundtruth_estimate0/data.csv
- VINS-Mono估计的轨迹 vinsmono_noloop_euroc_MH01_01.csv
- 设置对齐显示 -va
- 在XY平面绘图 --plot --plot_mode xy
- 设置保存路径 --save_results results/VINS_Mono_Noloop_MH01_01
这里如果我们要分析多条曲线的时候就不能在用euroc命令了,需要换成tum的命令
2.2 分析多条轨迹
evo_traj tum msckf_vio_result/msckf_vio_MH04_03.txt VINSMono_EUROC/vinsmono_noloop_euroc_MH04_01.csv --ref=groundturth_euroc/MH_04_difficult/state_groundtruth_estimate0/groundtruth.csv -a --plot --plot_mode xy

3 EUROC数据集测试
3.1 定位精度
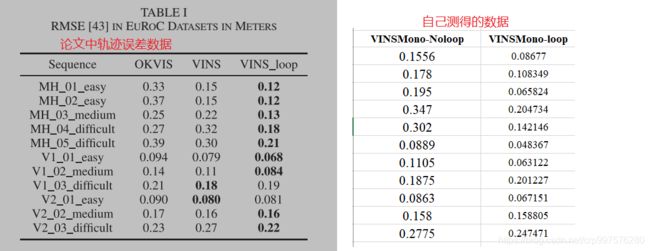
不得不说,VINS-Mono还是相当优秀的,我自己在EUROC数据集上运行的结果和论文中的结果是一致的。图片中左图来源于论文[1]
下图为VINS-Mono在EUROC数据集上开启回环模式下的轨迹图

3.2 计算时间
在跟踪时间上 VISN-Mono 把特征点跟踪和位姿求解分成了两个ROS节点运行,其在整个EUROC数据集上的平均跟踪时间为0.01s(10 ms), 但位姿估计的时间确有36ms, 详细的数据见下表,因此也可以在时间上优化VINS-Mono的位姿优化

参考资料
[1] Qin T, Li P, Shen S. Vins-mono: A robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020.
[2] https://blog.csdn.net/crp997576280/article/details/105385240