直接线性变换得到的旋转矩阵R和平移向量t如何投影到SE(3)流形上?
1前期分析
记直接线性变换(Direct Linear Transformation)得到的旋转矩阵为 R R R,平移向量为 t t t,投影方式为,
R ← ( R R T ) − 1 2 R R \leftarrow (RR^T)^{-\frac{1}{2}}R R←(RRT)−21R
然后代入线性方程组,利用最小二乘法更新平移向量 t t t。
随机生成4个路标点 [ X , Y , Z ] T [X,Y,Z]^T [X,Y,Z]T, X X X从-100至100米取值, Y Y Y从-30至30米取值, Z Z Z从0至100米取值,同时在X方向上加上均值为0标准差为0.5的高斯噪声,在Y方向上加上均值为0标准差为0.5的高斯噪声,在Z方向上加上均值为0标准差为0.4的高斯噪声。
旋转的真值设置为:先绕Z轴旋转10度,再绕Y轴旋转15度,最后绕X轴旋转20度。平移的真值设置为: [ 0.2 , 0.5 , 0.7 ] T [0.2,0.5,0.7]^T [0.2,0.5,0.7]T。
对比DLT求解出的R和t的误差和先DLT再投影到SE(3)流形上求解出来的R和t的误差。
2代码
Ubuntu下C++代码:
#include 3对比分析
使用matlab对aerr.txt和perr.txt进行分析,可得,
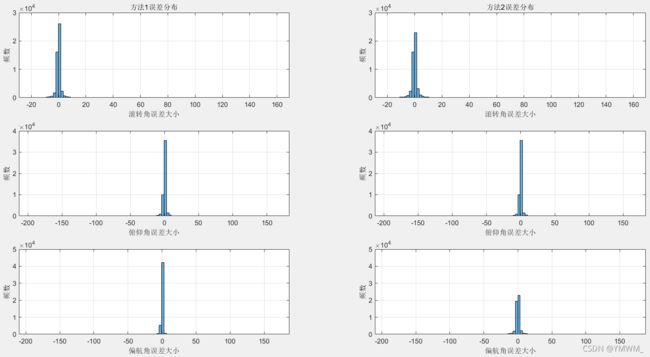
3.1角度误差
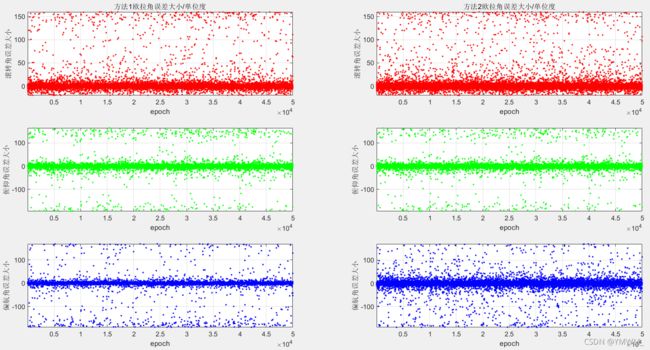
| 方法 | 滚转角误差均值和标准差/单位度 | 俯仰角误差均值和标准差/单位度 | 偏航角误差均值和标准差/单位度 |
|---|---|---|---|
| DLT | 1.2235,12.3224 | 0.1292,14.3453 | -0.6777,14.7657 |
| DLT+SE(3) | 1.4319,12.9115 | 0.0538,13.6840 | -0.4533,15.0027 |
3.2平移误差
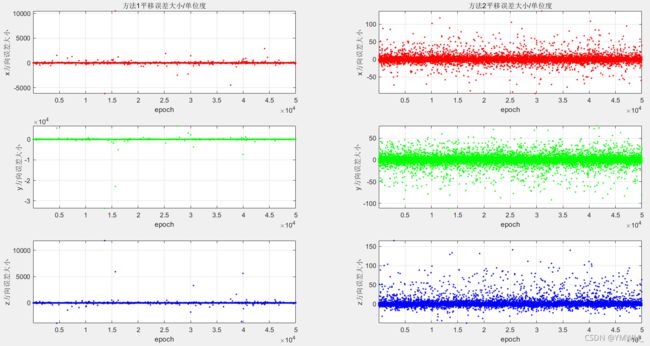
| 方法 | x方向上误差均值和标准差/单位米 | y方向上均值和标准差/单位米 | z方向上均值和标准差/单位米 |
|---|---|---|---|
| DLT | 0.1294,65.7250 | -0.8120,192.8713 | 0.0628,73.0519 |
| DLT+SE(3) | 0.1220,4.7943 | 0.2778,5.3497 | 0.2545,5.1164 |
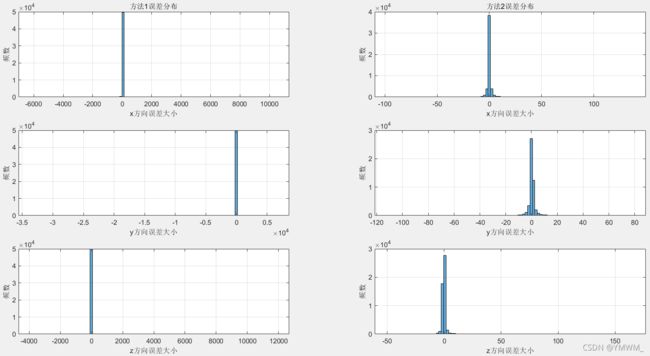
4结论
虽然在角度误差上方法1和方法2相近;但在平移误差上,方法2在均值和标准差上优于方法1,尤其是在标准差上!