costmap_2d详解2:Costmap 代码整体分析
代码文件结构:
costmap_2d
├── plugins
│ ├── beifen-virtualWall_layer.cpp
│ ├── inflation_layer.cpp //膨胀层
│ ├── obstacle_layer.cpp //动态障碍物层
│ ├── simple_layer.cpp
│ ├── static_layer.cpp //静态障碍物层
│ ├── virtualWall_layer.cpp
│ └── voxel_layer.cpp //将动态障碍物层分成三维障碍物层
├── src
│ ├── array_parser.cpp
│ ├── costmap_2d_cloud.cpp
│ ├── costmap_2d.cpp
│ ├── costmap_2d_markers.cpp
│ ├── costmap_2d_node.cpp
│ ├── costmap_2d_publisher.cpp //发布master costmap
│ ├── costmap_2d_ros.cpp //与ros 对接的入口
│ ├── costmap_layer.cpp
│ ├── costmap_math.cpp
│ ├── footprint.cpp //足迹
│ ├── layer.cpp //各种costmap层的基类
│ ├── layered_costmap.cpp //管理master costmap
│ └── observation_buffer.cpp //动态障碍物数据信息保存数组代码类继承关系及整体逻辑流程
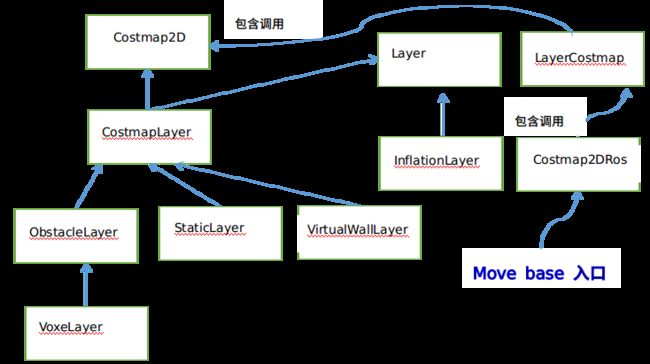
mobe_base 中调用costmap_2d_ros 接口
planner_costmap_ros_ = new costmap_2d::Costmap2DROS("global_costmap", tf_);
controller_costmap_ros_ = new costmap_2d::Costmap2DROS("local_costmap", tf_);costmap_2d_ros.cpp 中调用LayeredCostmap
//实例化LayeredCostmap的指针,track_unknown_space is true
layered_costmap_ = new LayeredCostmap(global_frame_, rolling_window, track_unknown_space);
//创建一个以 type为类类型的实例变量,然后让plugin这个指针指向这个实例
boost::shared_ptr plugin = plugin_loader_.createInstance(type);
layered_costmap_->addPlugin(plugin);
//这里就会调用到插件的initialize 函数
plugin->initialize(layered_costmap_, name + "/" + pname, &tf_);
(initialize 在父类layer.cpp 中,它会调用虚函数onInitialize,最后各个plugin 层会实现该方法) 另外一个线程mapUpdateLoop,去更新地图
//更新地图
updateMap(); => layered_costmap_->updateMap(x, y, yaw);
然后更新各个插件层地图范围,和cost 值
(*plugin)->updateBounds(robot_x, robot_y, robot_yaw, &minx_, &miny_, &maxx_, &maxy_);
(*plugin)->updateCosts(costmap_, x0, y0, xn, yn);
LayeredCostmap 中更新每一costmap 范围和cell栅格cost 值
//根据各层的更新情况确定地图更新范围的边界
(*plugin)->updateBounds(robot_x, robot_y, robot_yaw, &minx_, &miny_, &maxx_, &maxy_);
//更新该层costmap 大小
costmap_.resetMap(x0, y0, xn, yn);
//调用各层的updateCosts函数用各层的信息去更新更新范围内的地图信息
//x0, y0, xn, yn是该层costmap地图左下角和右上角坐标,以像素表示
(*plugin)->updateCosts(costmap_, x0, y0, xn, yn);