DS-SLAM代码解析和问题整理 (一)
目录
- 资源
- 介绍
- ros_tum_realtime.cc
-
- Step 1.前期工作
-
- 1.1 定义了一个ROS的节点
- 1.2 从tum的associate.txt文件读取时间戳,RGB图像,时间戳,深度图像
- 1.3 检查RGB图像和深度图像
- 1.4 创建一个查看器
- Step 2.创建一个SLAM系统
-
- 2.1 创建SLAM系统
- 2.2 创建一个节点的句柄,并发布话题
- 2.3 对于所有图片
-
- 2.3.1 加载RGB图像,深度图和时间戳
- 2.3.2 检查图片是否加载成功
- 2.3.3 (重点关注)在一个while循环里面遍历数据集里面的每一幅图片,并将深度图imD,RGB图imRGB逐个发送到SLAM系统之中,并可以获得当前帧的位姿矩阵Tcw
- 2.3.4 记录每一帧图像处理的时间
- 2.3.5 (重点关注)通过ROS将位姿矩阵T发送到前面的3个Topic
- step 3 如果所有的图像都预测完了,那么终止当前的SLAM系统
- step 4 计算平均耗时
- step 5 保存TUM格式的相机轨迹
- 参考文献
资源
- DS-SLAM代码: https://github.com/ivipsourcecode/DS-SLAM
- DS-SLAM论文: https://arxiv.org/abs/1809.08379v1
介绍
-
DS-SLAM是一篇18年的论文,时间相对较早,论文的深度学习模型使用了caffe-segnet-cudnn5版本.(所以在安装DS-SLAM时最好使用9.0版本及以下的CUDA)
-
引用原文:本文提出了一种针对动态环境的语义视觉SLAM,称为DS-SLAM。DS-SLAM中有五个线程并行运行:跟踪,语义分割,局部建图,回环检测和稠密语义建图。DS-SLAM结合了语义分割网络和移动一致性检查方法,以减少动态对象的影响,从而在动态环境中大大提高了定位精度。同时,生成了密集的语义八叉树图,可用于高级任务。
-
所以我们在代码上主要关注Frame.cc, ORBextractor.cc(作者代码里说要关注ORBmatcher,但里面只有一些微小的改动,感觉是作者写错了), Pointcloudmapping.cc and Segment.cc这几个文件(点击进行跳转).
ros_tum_realtime.cc
我们首先从主函数开始,方便对于整个系统框架有个理解.
主函数主要做了 件事:
Step 1.前期工作
1.1 定义了一个ROS的节点
ros::init(argc, argv, "TUM");
1.2 从tum的associate.txt文件读取时间戳,RGB图像,时间戳,深度图像
LoadImages(strAssociationFilename, vstrImageFilenamesRGB, vstrImageFilenamesD, vTimestamps);
1.3 检查RGB图像和深度图像
if(vstrImageFilenamesRGB.empty())
{
cerr << endl << "No images found in provided path." << endl;
return 1;
}
else if(vstrImageFilenamesD.size()!=vstrImageFilenamesRGB.size())
{
cerr << endl << "Different number of images for rgb and depth." << endl;
return 1;
}
1.4 创建一个查看器
ORB_SLAM2::Viewer *viewer;
viewer = new ORB_SLAM2::Viewer();
Step 2.创建一个SLAM系统
2.1 创建SLAM系统
ORB_SLAM2::System SLAM(argv[1],argv[2], argv[5],argv[6],argv[7],ORB_SLAM2::System::RGBD, viewer);
2.2 创建一个节点的句柄,并发布话题
ros::NodeHandle nh; //创建一个节点的句柄
// 发布了消息类型为geometry_msgs::PoseStamped 的消息,话题为/Camera_Pose" ,消息队列的大小为1
CamPose_Pub = nh.advertise<geometry_msgs::PoseStamped>("/Camera_Pose",1);
// 发布了话题/Camera_Odom ,消息队列大小为1
Camodom_Pub = nh.advertise<geometry_msgs::PoseWithCovarianceStamped>("/Camera_Odom", 1);
// 发布了话题/odom ,消息队列大小为50
odom_pub = nh.advertise<nav_msgs::Odometry>("odom", 50);
2.3 对于所有图片
while(ros::ok()&&ni其中int nImages = vstrImageFilenamesRGB.size(); // 当前图像序列中的图像数目
2.3.1 加载RGB图像,深度图和时间戳
imRGB = cv::imread(string(argv[3])+"/"+vstrImageFilenamesRGB[ni],CV_LOAD_IMAGE_UNCHANGED);
imD = cv::imread(string(argv[3])+"/"+vstrImageFilenamesD[ni],CV_LOAD_IMAGE_UNCHANGED);
double tframe = vTimestamps[ni];
2.3.2 检查图片是否加载成功
if(imRGB.empty())
{
cerr << endl << "Failed to load image at: "
<< string(argv[3]) << "/" << vstrImageFilenamesRGB[ni] << endl;
return 1;
}
2.3.3 (重点关注)在一个while循环里面遍历数据集里面的每一幅图片,并将深度图imD,RGB图imRGB逐个发送到SLAM系统之中,并可以获得当前帧的位姿矩阵Tcw
Camera_Pose = SLAM.TrackRGBD(imRGB,imD,tframe);
2.3.4 记录每一帧图像处理的时间
double orbTimeTmp=SLAM.mpTracker->orbExtractTime;
double movingTimeTmp=SLAM.mpTracker->movingDetectTime;
segmentationTime=SLAM.mpSegment->mSegmentTime;
2.3.5 (重点关注)通过ROS将位姿矩阵T发送到前面的3个Topic
Pub_CamPose(Camera_Pose);
void Pub_CamPose(cv::Mat &pose)
这里的位姿矩阵时一个4*4的矩阵,里面包含了平移和旋转的信息.
//定义了一个TF广播,用于之后将位姿信息广播到TF树:
orb_slam_broadcaster = new tf::TransformBroadcaster;
if(pose.dims<2 || pose.rows < 3) //如果位姿的维度或行数不符合,就跳过本次广播
{
Rwc = Rwc;
twc = twc;
}
// 如果满足条件,就取出T矩阵里面的旋转矩阵R和平移向量t,并将旋转矩阵R转化为四元数Q,
Rwc = pose.rowRange(0,3).colRange(0,3).t();
twc = -Rwc*pose.rowRange(0,3).col(3);
rotationMat << …
//将旋转矩阵R 转化为四元数 Q
Eigen::Quaterniond Q(rotationMat);
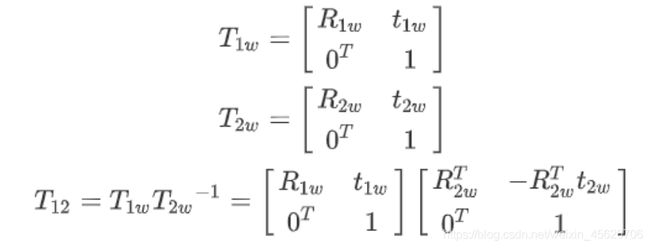
- 此处twc =-Rwc*pose.rowRange(0,3).col(3);是因为在求位姿的逆.即系统像发布的是相机坐标系到世界坐标系的变换矩阵Twc
// 将位姿信息放到tf::Transform orb_slam中里面(为了最终传播给ros)
Pose_quat[0] = Q.x(); Pose_quat[1] = Q.y();
Pose_quat[2] = Q.z(); Pose_quat[3] = Q.w();
Pose_trans[0] = twc.at(0);
Pose_trans[1] = twc.at(1);
Pose_trans[2] = twc.at(2);
orb_slam.setOrigin(tf::Vector3(Pose_trans[2], -Pose_trans[0], -Pose_trans[1]));
orb_slam.setRotation(tf::Quaternion(Q.z(), -Q.x(), -Q.y(), Q.w()));
将这个变换矩阵广播到TF树上面去:
orb_slam_broadcaster->sendTransform(tf::StampedTransform(orb_slam, // 存储的是变换矩阵
ros::Time::now(), // 时间戳
"/map", // 父坐标系
"/base_link")); //子坐标系
- 我们不仅要把SLAM计算的位姿矩阵广播到TF树上面去,还要把这个位姿矩阵发布到topic上面去,因此我们需要将Transform的数据类型转换为ros的msg消息类型
//赋予geometry_msgs::PoseStamped的时间戳,frame_id
Cam_Pose.header.stamp = ros::Time::now();
Cam_Pose.header.frame_id = “/map”;
// 分别将点(位移),和四元数转换到msg格式
tf::pointTFToMsg(orb_slam.getOrigin(), Cam_Pose.pose.position);
tf::quaternionTFToMsg(orb_slam.getRotation(), Cam_Pose.pose.orientation);
同理对geometry_msgs::PoseWithCovarianceStamped类型的Cam_odom也进行一样的操作,不同的是geometry_msgs::PoseWithCovarianceStamped需要定义一个位姿的协方差
Cam_odom.pose.covariance = {0.01, 0, 0, 0, 0, 0,
0, 0.01, 0, 0, 0, 0,
0, 0, 0.01, 0, 0, 0,
0, 0, 0, 0.01, 0, 0,
0, 0, 0, 0, 0.01, 0,
0, 0, 0, 0, 0, 0.01};
//发布消息
CamPose_Pub.publish(Cam_Pose);
Camodom_Pub.publish(Cam_odom);
同理对nav_msgs::Odometry类型的odom也进行一样的操作,不同的是nav_msgs::Odometry需要定义三个方向的速度
double dt = (current_time - last_time).toSec();
double vx = (Cam_odom.pose.pose.position.x - lastx)/dt;
double vy = (Cam_odom.pose.pose.position.y - lasty)/dt;
double vth = (Cam_odom.pose.pose.orientation.z - lastth)/dt;
odom.twist.twist.linear.x = vx;
odom.twist.twist.linear.y = vy;
odom.twist.twist.angular.z = vth;
更新位置和时间,用于下一次计算nav_msgs::Odometry三个方向的速度
last_time = current_time;
lastx = Cam_odom.pose.pose.position.x;
lasty = Cam_odom.pose.pose.position.y;
lastth = Cam_odom.pose.pose.orientation.z;
step 3 如果所有的图像都预测完了,那么终止当前的SLAM系统
SLAM.Shutdown();
step 4 计算平均耗时
cout << "median tracking time: " << vTimesTrack[nImages/2] << endl;
cout << "mean tracking time: " << totaltime/nImages << endl;
cout << "mean orb extract time =" << orbTotalTime/nImages << endl;
cout << "mean moving detection time =" << movingTotalTime/nImages<< endl;
cout << "mean segmentation time =" << segmentationTime/nImages<< endl;
step 5 保存TUM格式的相机轨迹
SLAM.SaveTrajectoryTUM("/home/z/catkin_ws/src/DS-SLAM/result/CameraTrajectory.txt");
SLAM.SaveKeyFrameTrajectoryTUM("/home/z/catkin_ws/src/DS-SLAM/result/KeyFrameTrajectory.txt");
参考文献
https://blog.csdn.net/qq_41623632/article/details/112911046?spm=1001.2014.3001.5501
https://zhuanlan.zhihu.com/p/152063872?utm_source=wechat_timeline