nav_msgs/Odometry和geometry_msgs/Pose2D 类型比较与转化
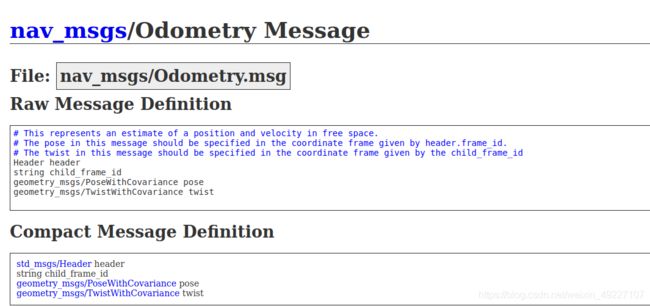
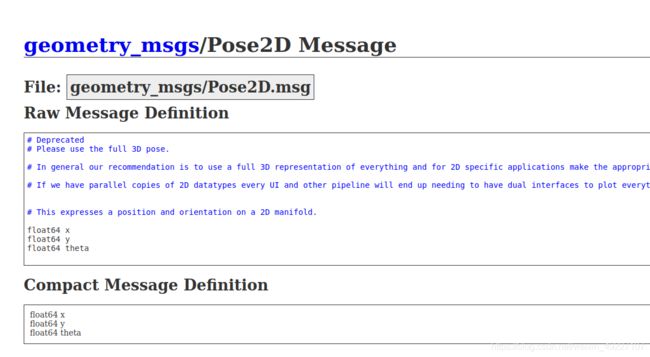
 看到geometry_msgs/Pose2D的类型很简单,所以要把ICP发布的这个里程计信息转化成nav_msgs/Odometry
看到geometry_msgs/Pose2D的类型很简单,所以要把ICP发布的这个里程计信息转化成nav_msgs/Odometry
原代码:
if (publish_pose_)
{
// unstamped Pose2D message
geometry_msgs::Pose2D::Ptr pose_msg;
pose_msg = boost::make_shared<geometry_msgs::Pose2D>();
pose_msg->x = f2b_.getOrigin().getX();
pose_msg->y = f2b_.getOrigin().getY();
pose_msg->theta = tf::getYaw(f2b_.getRotation());
pose_publisher_.publish(pose_msg);
}
改后:
// An highlighted block
if (publish_pose_)
{
// unstamped Pose2D message
nav_msgs::Odometry::Ptr pose_msg;
pose_msg = boost::make_shared<nav_msgs::Odometry>();
pose_msg.header.stamp = ros::Time(time);
pose_msg.header.frame_id = "world";
pose_msg.child_frame_id = "base_link";
pose_msg.pose.pose.position.x = f2b_.getOrigin().getX();
pose_msg.pose.pose.position.y = f2b_.getOrigin().getY();
pose_msg.pose.orientation.z = tf::getYaw(f2b_.getRotation());
pose_msg.pose.covariance = {1, 0, 0, 0, 0, 0,
0, 1, 0, 0, 0, 0,
0, 0, 1, 0, 0, 0,
0, 0, 0, 99999, 0, 0,
0, 0, 0, 0, 99999, 0,
0, 0, 0, 0, 0, 99999};
pose_publisher_.publish(pose_msg);
}
看似没问题。但是编译后报错:

改一下:
// An highlighted block
if (publish_pose_)
{
// unstamped Pose2D message
nav_msgs::Odometry pose_msg;
//pose_msg = boost::make_shared();
pose_msg.header.stamp = ros::Time(time);
pose_msg.header.frame_id = "world";
pose_msg.child_frame_id = "base_link";
pose_msg.pose.pose.position.x = f2b_.getOrigin().getX();
pose_msg.pose.pose.position.y = f2b_.getOrigin().getY();
pose_msg.pose.pose.orientation.z = tf::getYaw(f2b_.getRotation());
pose_msg.pose.covariance = {1, 0, 0, 0, 0, 0,
0, 1, 0, 0, 0, 0,
0, 0, 1, 0, 0, 0,
0, 0, 0, 99999, 0, 0,
0, 0, 0, 0, 99999, 0,
0, 0, 0, 0, 0, 99999};
pose_publisher_.publish(pose_msg);
}
现在不报错了。把话题名和类型改成/odom和nav_msgs::Odometry