LeGO-LOAM 源码阅读笔记(imageProjecion.cpp)
LeGO-LOAM是一种在LOAM之上进行改进的激光雷达建图方法,建图效果比LOAM要好,但是建图较为稀疏,计算量也更小了。
本文原地址:wykxwyc的博客
github注释后LeGO-LOAM源码:LeGO-LOAM_NOTED
关于代码的详细理解,建议阅读:1.地图优化代码理解
2.图像重投影代码理解
3.特征关联代码理解
4.LeGO-LOAM中的数学公式推导
以上博客会随时更新,如果对你有帮助,请点击注释代码的github仓库右上角star按钮,你的鼓励将给我更多动力。
文章目录
-
-
- imageProjecion.cpp概述
- imageProjecion
- cloudHandler
- velodyne 雷达数据
- findStartEndAngle
- projectPointCloud
- 各种标记的含义
- groundRemoval
- cloudSegmentation
- labelComponents
- publishCloud
- resetParameters
-
imageProjecion.cpp概述
imageProjecion.cpp进行的数据处理是图像映射,将得到的激光数据分割,并在得到的激光数据上进行坐标变换。
imageProjecion
imageProjecion()构造函数的内容如下:
- 订阅话题:订阅来自velodyne雷达驱动的topic
"/velodyne_points"(sensor_msgs::PointCloud2),订阅的subscriber是subLaserCloud。
- 发布话题,这些topic有:
"/full_cloud_projected"(sensor_msgs::PointCloud2)"/full_cloud_info"(sensor_msgs::PointCloud2)"/ground_cloud"(sensor_msgs::PointCloud2)"/segmented_cloud"(sensor_msgs::PointCloud2)"/segmented_cloud_pure"(sensor_msgs::PointCloud2)"/segmented_cloud_info"(cloud_msgs::cloud_info)"/outlier_cloud"(sensor_msgs::PointCloud2)
然后分配内存(对智能指针初始化),初始化各类参数。
上述的cloud_msgs::cloud_info是自定义的消息类型,其具体定义如下:
Header header
int32[] startRingIndex // 长度:N_SCAN
int32[] endRingIndex // 长度:N_SCAN
float32 startOrientation
float32 endOrientation
float32 orientationDiff
// 以下长度都是 N_SCAN*Horizon_SCAN
bool[] segmentedCloudGroundFlag
uint32[] segmentedCloudColInd
float32[] segmentedCloudRange
关于上面的自定义消息,另外还需要说明的是,segMsg.startRingIndex[i] = sizeOfSegCloud-1 + 5;或者segMsg.endRingIndex[i] = sizeOfSegCloud-1 - 5;表示的是将第0线和第16线点云横着排列后。每一线点云有一个startRingIndex和endRingIndex,表示这一线点云中的一部分,如下图绿色部分。
黑色部分是整体这一线点云中筛选出来满足条件的。

cloudHandler
void cloudHandler(const sensor_msgs::PointCloud2ConstPtr& laserCloudMsg)是这个文件中最主要的一个函数。由它调用其他的函数:
void cloudHandler(const sensor_msgs::PointCloud2ConstPtr& laserCloudMsg){
copyPointCloud(laserCloudMsg);
findStartEndAngle();
projectPointCloud();
groundRemoval();
cloudSegmentation();
publishCloud();
resetParameters();
}
- 整体过程如下:
1.复制点云数据
2.找到开始和结束的角度
3.移除地面点
4.点云分块
5.发布处理后的点云数据
6.重置参数
上面第一部分复制点云数据函数copyPointCloud(laserCloudMsg) 是将ROS中的sensor_msgs::PointCloud2ConstPtr类型转换到pcl点云库指针。
velodyne 雷达数据
首先从VLP给的雷达数据手册上(63-9243 Rev B User Manual and Programming Guide,VLP-16.pdf)查找一下它的坐标系定义:
velodyne雷达在上面的坐标系下输出"/velodyne_points"(sensor_msgs::PointCloud2) 的点云数据。其数据格式可以理解为x,y,z,intensity 这4个量(它的定义比sensor_msgs::PointCloud要复杂一点,但本质还是这几个量)。
findStartEndAngle
void findStartEndAngle()进行关于segMsg(cloud_msgs::cloud_info segMsg)的三个内容的计算:
1)计算开始角度(segMsg.startOrientation);
2)计算结束角度(segMsg.endOrientation);
3)计算雷达转过的角度(开始和结束的角度差,segMsg.orientationDiff)。
关于具体计算,需要清楚整个雷达的坐标系定义,参考上面雷达坐标系的那张图。
另外在计算segMsg.startOrientation和segMsg.endOrientation时,atan2(..)函数取了负数的原因是:雷达旋转方向和坐标系定义下的右手定则正方向不一致。参考下图:

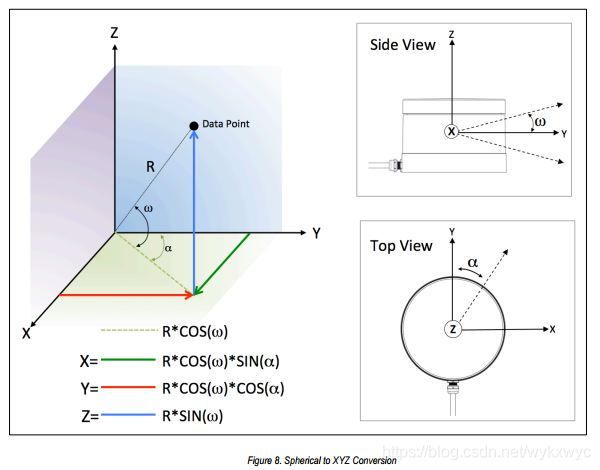
projectPointCloud
void projectPointCloud()将激光雷达得到的数据看成一个16x1800的点云阵列。然后根据每个点云返回的XYZ数据将他们对应到这个阵列里去。
- 计算竖直角度,用
atan2函数进行计算。 - 通过计算的竖直角度得到对应的行的序号
rowIdn,rowIdn计算出该点激光雷达是水平方向上第几线的。从下往上计数,-15度记为初始线,第0线,一共16线(N_SCAN=16)。 - 求水平方向上的角度
horizonAngle = atan2(thisPoint.x, thisPoint.y) * 180 / M_PI;。 - 根据水平方向上的角度计算列向量
columnIdn。
这里对数据的处理比较巧妙,一开始觉得很奇怪,但后来发现这样做其实让数据更不容易失真。
计算columnIdn主要是下面这三个语句:
columnIdn = -round((horizonAngle-90.0)/ang_res_x) + Horizon_SCAN/2;
if (columnIdn >= Horizon_SCAN)
columnIdn -= Horizon_SCAN;
if (columnIdn < 0 || columnIdn >= Horizon_SCAN)
continue;
先把columnIdn从horizonAngle:(-PI,PI]转换到columnIdn:[H/4,5H/4],然后判断columnIdn大小,再讲它的范围转换到了[0,H] (H:Horizon_SCAN)。
这样就把扫描开始的地方角度为0与角度为360的连在了一起,非常巧妙。
5. 接着在thisPoint.intensity中保存一个点的位置信息rowIdn+columnIdn / 10000.0,fullInfoCloud的点保存点的距离信息;
具体的转换过程可以看下面这个两张图:

各种标记的含义
-
groundMat:
1) groundMat.at(i,j) = 0,初始值;
2) groundMat.at(i,j) = 1,有效的地面点;
3) groundMat.at(i,j) = -1,无效地面点; -
rangeMat
1) rangeMat.at(i,j) = FLT_MAX,浮点数的最大值,初始化信息;
2) rangeMat.at(rowIdn, columnIdn) = range,保存图像深度; -
labelMat
1) labelMat.at(i,j) = 0,初始值;
2) labelMat.at(i,j) = -1,无效点;
3)labelMat.at(thisIndX, thisIndY) = labelCount,平面点;
4)labelMat.at(allPushedIndX[i], allPushedIndY[i]) = 999999,需要舍弃的点,数量不到30。
groundRemoval
void groundRemoval()由三个部分的程序组成。
- 由上下两线之间点的XYZ位置得到两线之间的俯仰角,如果俯仰角在10度以内,则判定(i,j)和(i,j+1)为地面点,
groundMat[i][j]=1,否则,则不是地面点,进行后续操作; - 找到所有点中的地面点,并将他们的
labelMat标记为-1,rangeMat[i][j]==FLT_MAX判定为无效的另一个条件。 - 如果有节点订阅groundCloud,那么就需要把地面点发布出来。具体实现过程:把点放到groundCloud队列中去。这样就把地面点和非地面点标记并且区分开来了。
cloudSegmentation
void cloudSegmentation()进行的是点云分割的操作,将不同类型的点云放到不同的点云块中去,例如outlierCloud,segmentedCloudPure等。具体步骤:
- 首先判断点云标签,这个点云没有进行过分类(在原先的处理中没有被分到地面点中去或没有分到平面中),则通过
labelComponents(i, j);对点云进行分类。进行分类的过程在labelComponents中进行介绍。 - 分类完成后,找到可用的特征点或者地面点(不选择labelMat[i][j]=0的点),按照它的标签值进行判断,将部分界外点放进
outlierCloud中。continue继续处理下一个点。 - 然后将大部分地面点去掉,省下的那些点进行信息的拷贝与保存操作。
- 最后如果有节点订阅
SegmentedCloudPure,那么把点云数据保存到segmentedCloudPure中去。
labelComponents
void labelComponents(int row, int col)对点云进行标记。通过标准的BFS算法对点进行标记:以(row,col)为中心向外面扩散,判断(row,col)是否属于平面中一点。
- BFS过程:
1.用queueIndX,queueIndY保存进行分割的点云行列值,用queueStartInd作为索引。
2.求这个点的4个邻接点,求其中离原点距离的最大值d1最小值d2。根据下面这部分代码来评价这两点之间是否具有平面特征。注意因为两个点上下或者水平对应的分辨率不一样,所以alpha是用来选择分辨率的。
// alpha代表角度分辨率,
// Y方向上角度分辨率是segmentAlphaY(rad)
if ((*iter).first == 0)
alpha = segmentAlphaX;
else
alpha = segmentAlphaY;
// 通过下面的公式计算这两点之间是否有平面特征
// atan2(y,x)的值越大,d1,d2之间的差距越小,越平坦
angle = atan2(d2*sin(alpha), (d1 -d2*cos(alpha)));
- 在这之后通过判断角度是否大于60度来决定是否要将这个点加入保存的队列。加入的话则假设这个点是个平面点。
- 然后进行聚类,聚类的规则是:
1.如果聚类超过30个点,直接标记为一个可用聚类,labelCount需要递增;
2.如果聚类点数小于30大于等于5,统计竖直方向上的聚类点数
3.竖直方向上超过3个也将它标记为有效聚类
4.标记为999999的是需要舍弃的聚类的点,因为他们的数量小于30个
publishCloud
void publishCloud()发布各类点云数据。
// 发布各类点云内容
void publishCloud(){
// 发布cloud_msgs::cloud_info消息
segMsg.header = cloudHeader;
pubSegmentedCloudInfo.publish(segMsg);
sensor_msgs::PointCloud2 laserCloudTemp;
// pubOutlierCloud发布界外点云
pcl::toROSMsg(*outlierCloud, laserCloudTemp);
laserCloudTemp.header.stamp = cloudHeader.stamp;
laserCloudTemp.header.frame_id = "base_link";
pubOutlierCloud.publish(laserCloudTemp);
// pubSegmentedCloud发布分块点云
pcl::toROSMsg(*segmentedCloud, laserCloudTemp);
laserCloudTemp.header.stamp = cloudHeader.stamp;
laserCloudTemp.header.frame_id = "base_link";
pubSegmentedCloud.publish(laserCloudTemp);
if (pubFullCloud.getNumSubscribers() != 0){
pcl::toROSMsg(*fullCloud, laserCloudTemp);
laserCloudTemp.header.stamp = cloudHeader.stamp;
laserCloudTemp.header.frame_id = "base_link";
pubFullCloud.publish(laserCloudTemp);
}
if (pubGroundCloud.getNumSubscribers() != 0){
pcl::toROSMsg(*groundCloud, laserCloudTemp);
laserCloudTemp.header.stamp = cloudHeader.stamp;
laserCloudTemp.header.frame_id = "base_link";
pubGroundCloud.publish(laserCloudTemp);
}
if (pubSegmentedCloudPure.getNumSubscribers() != 0){
pcl::toROSMsg(*segmentedCloudPure, laserCloudTemp);
laserCloudTemp.header.stamp = cloudHeader.stamp;
laserCloudTemp.header.frame_id = "base_link";
pubSegmentedCloudPure.publish(laserCloudTemp);
}
if (pubFullInfoCloud.getNumSubscribers() != 0){
pcl::toROSMsg(*fullInfoCloud, laserCloudTemp);
laserCloudTemp.header.stamp = cloudHeader.stamp;
laserCloudTemp.header.frame_id = "base_link";
pubFullInfoCloud.publish(laserCloudTemp);
}
}
resetParameters
void resetParameters()具体代码:
// 初始化/重置各类参数内容
void resetParameters(){
laserCloudIn->clear();
groundCloud->clear();
segmentedCloud->clear();
segmentedCloudPure->clear();
outlierCloud->clear();
rangeMat = cv::Mat(N_SCAN, Horizon_SCAN, CV_32F, cv::Scalar::all(FLT_MAX));
groundMat = cv::Mat(N_SCAN, Horizon_SCAN, CV_8S, cv::Scalar::all(0));
labelMat = cv::Mat(N_SCAN, Horizon_SCAN, CV_32S, cv::Scalar::all(0));
labelCount = 1;
std::fill(fullCloud->points.begin(), fullCloud->points.end(), nanPoint);
std::fill(fullInfoCloud->points.begin(), fullInfoCloud->points.end(), nanPoint);
}
(imageProjection.cpp完)