07.06工作日记,学习ros功能包,发布/接收图片
刚到公司啥都不会,公司让搞,ros学一下吧
参考连接:
https://www.cnblogs.com/penuel/p/11340317.html 创建功能包
https://blog.csdn.net/qq_34935373/article/details/103909011 ros发布/接收图片
https://blog.csdn.net/weixin_36976685/article/details/93994357
https://www.pianshen.com/article/97421551634/ 这俩都是opencv踩坑
07.07更新 https://www.freesion.com/article/5587455636/ ros发布pcd数据然后rviz接收
一.创建功能包:
1.mkdir -p ~/catkin_ws/src创建工作ws和src文件夹
(或cd catkin_ws 然后mkdir src #创建src文件夹,代码丢到这里面)
2在src目录下:catkin_init_worskspace 初始化一下
3.此时src目录下会有一个 CMakelists.txt
4.cd ~/catkin_ws/
5.catkin_make 编译一下,此时
工作空间下会有biuld devel 和src
6.在bashrc中添加 source ~/catkin_ws/devel/setup.bash
此时可以输入 echo $ROS_PACKAGE_PATH来看一下 是否make成功,输出是一条路径

7.source ~/.bachsrc 改变环境变量 (如何你 终端打开 gedit ~/.bashsrc里面有setup.sh就不用每次都输了)
8.创建功能包
cd ~/catkin_ws/src里
catkin_create_pkg 你功能包的名字 std_msgs rospy roscpp
9.cd ~/catkin_ws
10.catkin_make
此时创建好功能包
里面应该有三个东西,src目录 CMakelists.txt 和package.xml
完成功能包的创建。
二.利用ros发/收图片
在刚才最后一步,创建好的功能包我们命名成redwall_arm_vision,
里面只有三个文件,src目录和CMakeList.txt、package.xml,在src目录添加一张图片用于接下来的处理,我用的是大家非常熟悉的 lena.jpg:

利用vscode 输入 code. 打开项目,src目录下右键添加一个cpp文件,就命名为main.cpp把,程序内容如下:
#include
#include
#include
using namespace std;
// OpenCV includes
#include
#include
#include
#include
#include
#include
using namespace cv;
#include
#include
#include
#include
int main( int argc, char** argv )
{
int sample;
cout << "请输入0~7:" << endl;
cin>>sample;
switch(sample){
case 0:
{
cout << "Sample 0, Mat zeros" << endl;
Mat m= Mat::zeros(5,5, CV_32F);
cout << m << endl;
break;
}
case 1:
{
cout << "Sample 0, Mat ones" << endl;
Mat m= Mat::ones(5,5, CV_32F);
cout << m << endl;
break;
}
case 2:
{
cout << "Sample 0, Mat eye" << endl;
Mat m= Mat::eye(5,5, CV_32F);
cout << m << endl;
Mat a= Mat::eye(Size(3,2), CV_32F);
Mat b= Mat::ones(Size(3,2), CV_32F);
Mat c= a+b;
Mat d= a-b;
cout << "Sample 0, 矩阵元素和差" << endl;
cout << a << endl;
cout << b << endl;
cout << c << endl;
cout << d << endl;
break;
}
case 3:
{
cout << "Sample 0, Mat operations:" << endl;
Mat m0= Mat::eye(3,3, CV_32F);
m0=m0+Mat::ones(3,3, CV_32F);
Mat m1= Mat::eye(2,3, CV_32F);
Mat m2= Mat::ones(3,2, CV_32F);
cout << "\nm0\n" << m0 << endl;
cout << "\nm1\n" << m1 << endl;
cout << "\nm2\n" << m2 << endl;
cout << "\nm1.*2\n" << m1*2 << endl;
cout << "\n(m1+2).*(m1+3)\n" << (m1+1).mul(m1+3) << endl;
cout << "\nm1*m2\n" << m1*m2 << endl;
cout << "\nt(m2)\n" << m2.t() << endl;
cout << "\ninv(m0)\n" << m0.inv() << endl;
break;
}
case 4:
{
Mat image= imread("/home/redwall/catkin_ws/src/redwall_arm_vision/src/lena.jpg", CV_LOAD_IMAGE_COLOR);
int myRow=511;
int myCol=511;
int val=*(image.data+myRow*image.cols*image.channels()+ myCol);
cout << "Pixel value: " << val << endl;
// 有imshow就会报段错误
// imshow("Lena", image);
break;
}
case 5:
{
Mat image= imread("/home/redwall/catkin_ws/src/redwall_arm_vision/src/lena.jpg", CV_LOAD_IMAGE_COLOR);
int myRow=511;
int myCol=511;
int B=*(image.data+myRow*image.cols*image.channels()+ myCol + 0);
int G=*(image.data+myRow*image.cols*image.channels()+ myCol + 1);
int R=*(image.data+myRow*image.cols*image.channels()+ myCol + 2);
cout << "Pixel value (B,G,R): (" << B << "," << G << "," << R << ")" << endl;
break;
}
case 6:
{
ros::init(argc,argv,"image_color");
ros::NodeHandle nh;
image_transport::ImageTransport it(nh);
image_transport::Publisher pub = it.advertise("camera/image", 1);
/**************ROS与Opencv图像转换***********************/
Mat image= imread("/home/redwall/catkin_ws/src/redwall_arm_vision/src/lena.jpg", CV_LOAD_IMAGE_COLOR);
sensor_msgs::ImagePtr msg = cv_bridge::CvImage(std_msgs::Header(), "bgr8", image).toImageMsg();
ros::Rate loop_rate(5);
while (nh.ok()) {
pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
}
case 7:
{
ros::init(argc,argv,"image_gray");
ros::NodeHandle nh;
image_transport::ImageTransport it(nh);
image_transport::Publisher pub = it.advertise("camera/image", 1);
/**************ROS与Opencv图像转换***********************/
Mat gray= imread("/home/redwall/catkin_ws/src/redwall_arm_vision/src/lena.jpg", CV_LOAD_IMAGE_GRAYSCALE);
sensor_msgs::ImagePtr msg = cv_bridge::CvImage(std_msgs::Header(), "mono8", gray).toImageMsg();
ros::Rate loop_rate(5);
while (nh.ok()) {
pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
}
}
return 0;
} 然后我们需要更改src里面的CMakelists.txt内容:
cmake_minimum_required(VERSION 2.8.3)
project(redwall_arm_vision)
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
cv_bridge
geometry_msgs
sensor_msgs
OpenCV
image_transport
)
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES redwall_arm_vision
CATKIN_DEPENDS roscpp rospy std_msgs
# DEPENDS system_lib
)
include_directories(
# include
${catkin_INCLUDE_DIRS}
${OpenCV_INCLUDE_DIRS}
)
add_executable(main src/main.cpp)
target_link_libraries(main ${catkin_LIBRARIES} ${OpenCV_LIBRARIES})继续改package.xml里面的内容
redwall_arm_vision
0.0.0
redwall_arm_vision
sijia
TODO
catkin
roscpp
rospy
std_msgs
cv_bridge
geometry_msgs
sensor_msgs
image_transport
roscpp
rospy
std_msgs
cv_bridge
geometry_msgs
sensor_msgs
message_generation
image_transport
cv_bridge
geometry_msgs
sensor_msgs
message_runtime
roscpp
rospy
std_msgs
image_transport
此刻,完成功能包构建
1.编译功能包:
$ catkin_make -DCATKIN_WHITELIST_PACKAGES="redwall_arm_vision"
踩坑点a.记得要将main.cpp里面图片的路径改成自己的地址,首先在文件夹里复制图片,然后在代码段路径地方右键粘贴,直接可以复制路径。
此刻编译成功之后
2.打开终端roscore启动
rosrun redwall_arm_vision(功能包名)main(功能名) 来运行我们的功能
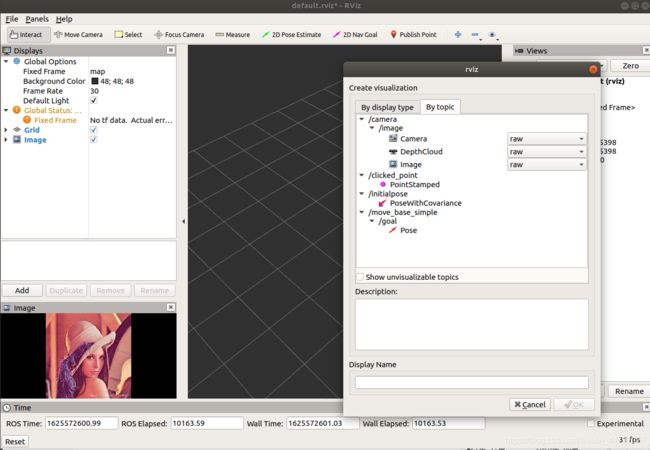
3.打开另一个终端 rviz
add我们的图片 显示出来了