ROS21讲
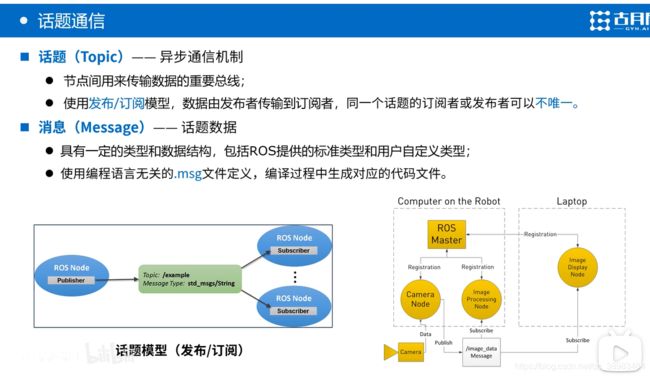
话题是管道,消息通过话题传输,订阅和发布是通过管道(话题)
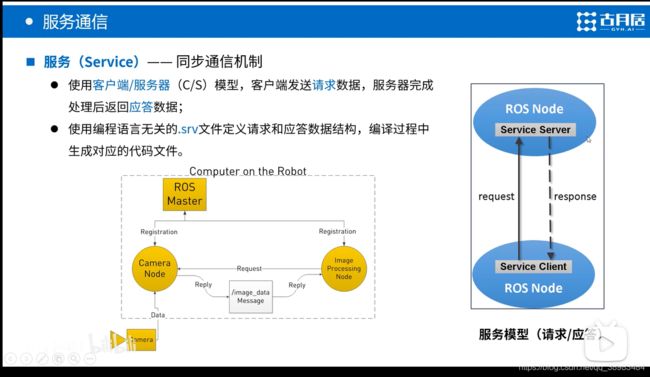
发出消息后需要得到回应的。一般为配置信息,进行一次配置时候运用服务 。话题是源源不断的进行传输。

rosnode是看节点的
/rosout是打开roscore之后默认的节点 主要是一些日志信息
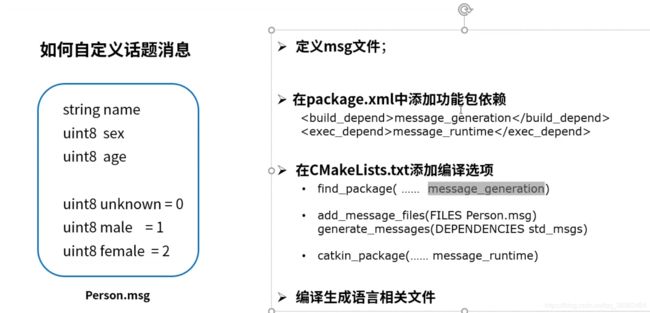
rosmsg show + 消息类型 展示你的消息的一些消息格式
1:创建功能空间的流程
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
编译工作空间
catkin_make
设置环境变量
source devel/setup.bash
检查环境变量
echo $ROS_PACKAGE_PATH
创建带有依赖包的文件
cd~/catkin_ws/src
catkin_create_pkg +名字 +依赖的包
catkin_create_pkg learn roscpp rospy std_msgs geometry_msgs turtlesim
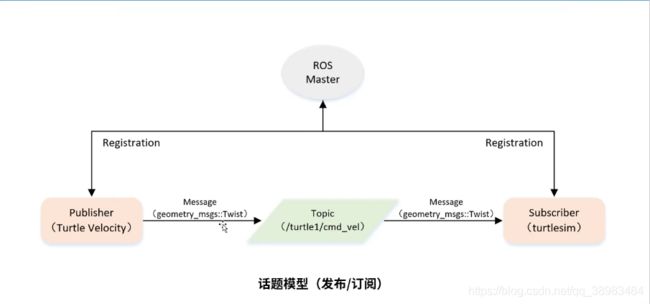
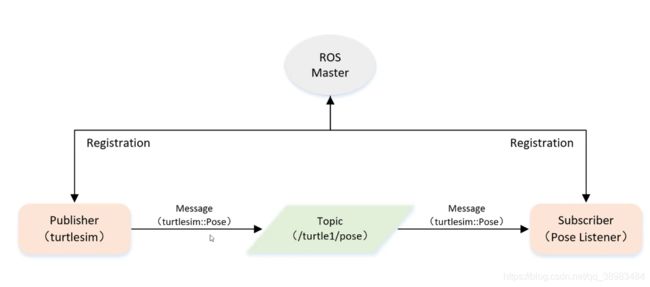
2:订阅和发布
#include注意CMakeList.txt 需要添加可执行文件和链接文件
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
add_executable :将某个程序文件 编译成某个可执行文件的
target_link_libraries :帮助将执行文件链接ROS的一些库进行链接的。
环境配置:
进入文件所在目录:pwd得到目录 然后复制到.bash中。
# include3:消息

/*
该例程将发布/person_info话题,自定义消息类型learn::Person
*/
#include /*
订阅/person_info话题 自定义消息类型learn::Person
*/
#include4:客户端服务端
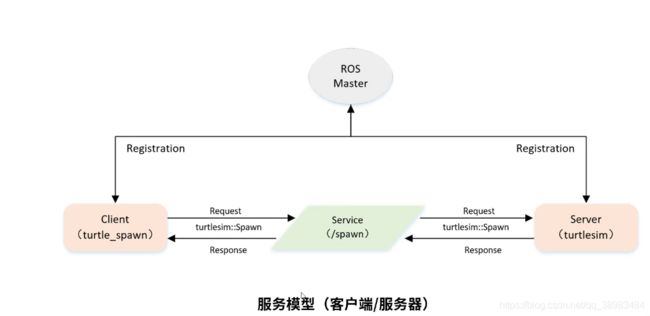
/*
请求/spawn服务 服务数据类型turtlesim::Spawn
*/
#include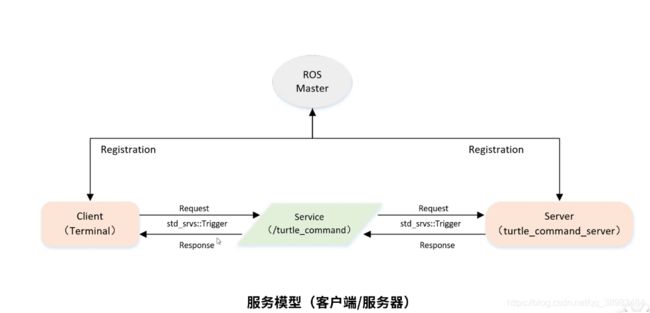
/*
执行/turtle_command服务,服务数据类型为std_srvs/Trigger
*/
#include