在VSCode下利用PlateFormIO开发Arduino的MicroROS遇到的一些问题
文章目录
- 简介
- 1.左下角没有platformio的相关按钮
- 2.vscode没有串行监视器(Serial Monitor)
- 3.关于trajectory_msgs/msg/joint_trajectory.hpp的相关问题
- 4.关于control_msgs::action::FollowJointTrajectory的相关问题
-
- 4.1.方法一
- 4.2.方法二
- 5.关于moveit_msg的相关问题
- 6.publisher以及service不能同时实现的问题
- 7.创建action失败的原因
- 8.关于action_name的字符长度被限制在29的问题
-
- 8.1 原因分析
- 8.2.解决办法
- 9.关于代码调试、信息打印
- 10.关于action_server无法接收goal的问题
-
- 10.1.现象
- 10.2.查找资料及分析
- 10.2.解决方案
- 11.关于action_server接收了goal,却无法Goal finished with status: xxx的问题
- 总结
简介
我是按照鱼香ROS的教程【3.搭建PlateFormIO开发环境】进行的,但是在进行的过程中,遇到了一些问题,这里记录下来,供有同样问题的同学进行参考。其实只要你使用的板子的MCU是ESP32,都可以按照他这个教程进行操作。
1.左下角没有platformio的相关按钮
在第四节编译工程中,教程使用的vscode的左下角是有编译、上传的按钮的。但是我的没有。
教程的:
 我的:
我的:
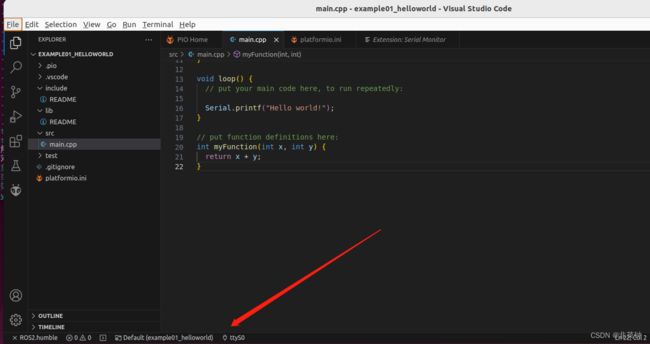
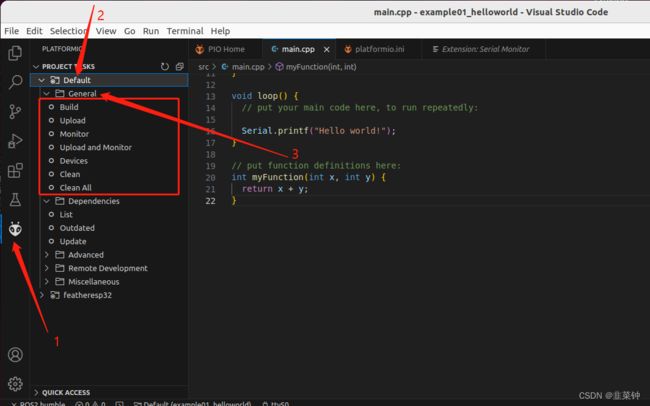
不过没关系,点击那个小蚂蚁,执行RROJECT TASKS–》General下面的命令,具有同样的效果。
后来又发现在右上角:

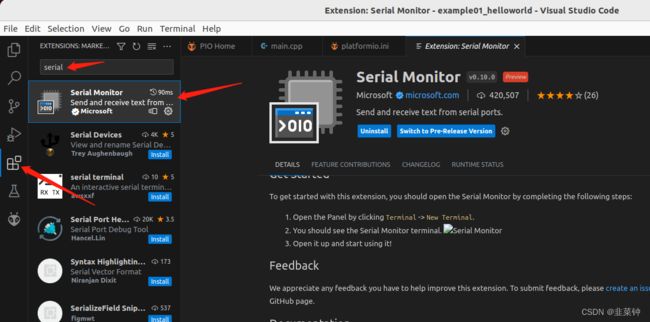
2.vscode没有串行监视器(Serial Monitor)
在【6.串口通信-接收实验】中,教程中是有这个串行监视器(Serial Monitor)的,但是我这边没有。

其实这个需要是个独立的拓展,需要自己独立安装。
3.关于trajectory_msgs/msg/joint_trajectory.hpp的相关问题
首先我们要明确,microros这个环境基本是基于c开发的,而不是cpp。所以,trajectory_msgs/msg/joint_trajectory.hpp这个cpp下的目录是没有的,取而代之的是trajectory_msgs/msg/joint_trajectory.h

4.关于control_msgs::action::FollowJointTrajectory的相关问题
假如我们想让我们的microros节点直接接入到moveit中,一种比较好的办法是直接在此节点上实现一个action_server,类型为control_msgs::action::FollowJointTrajectory。
但是目前鱼香ros的microros不支持该类型,而官方的也是不支持的(当使用官方的microros时,需要梯子或者fastgithub)。
不知道怎么回事,我看官方的【micro_ros_arduino】是有这个模块的。
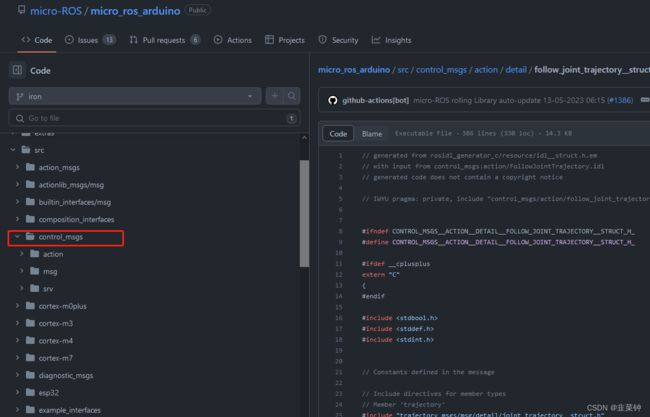
我在上面发起了个提问,到时候再看看。【I couldn’t find the control_msg module in the compiled include folder】
实在没办法的话,可以暂时在电脑端创建个action_server,然后通过用service传给下位机吧。
4.1.方法一
20230612:他们今天回答了。

意思大概是假如这个库没有control_msgs这个模块,需要自己按照 https://github.com/micro-ROS/micro_ros_platformio#extra-packages 这里的说明来进行添加到编译步骤中。

ok,那我们自己操作一下。
呃,但是,在哪个路径下搞这个extra_packages.repos呢?
问了一下chatgpt

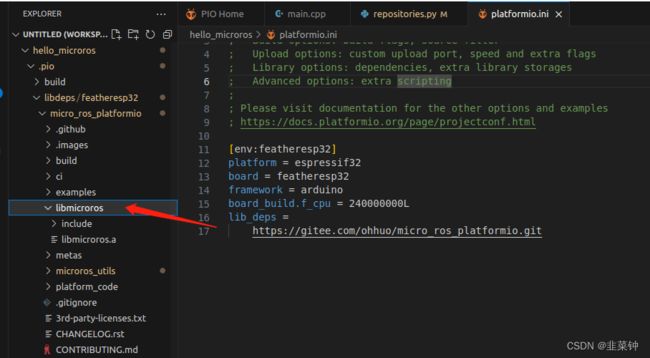
也就是在platformio.ini所在的目录下。
但是,extra_packages.repos应该如何写?
在 /home/yong/Desktop/arduino/hello_microros/.pio/libdeps/featheresp32/micro_ros_platformio/ci/extra_packages(你需要根据你自己的项目名字来决定这个路径,其实也就是你当前项目下的) 这个目录下是有一个extra_packages.repos。
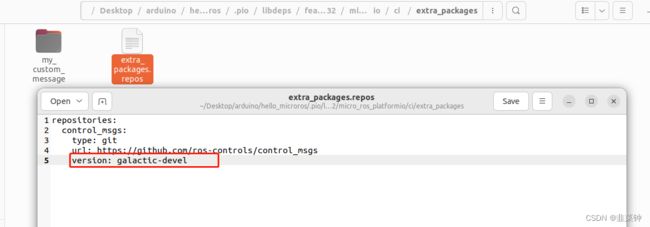
我们用的是humble,他这个是galactic-devl与humble可能不匹配。我们去 https://github.com/ros-controls/control_msgs 看看
 有humble的,那我们手动改一下:
有humble的,那我们手动改一下:
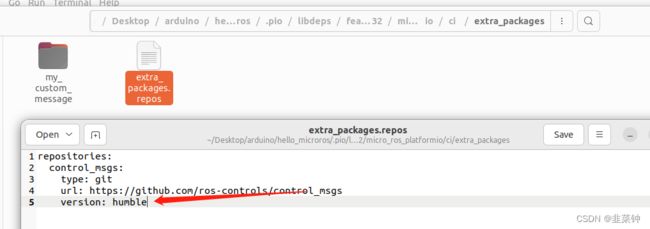 ok,那就按照它的写法,自己在platformio.ini所在目录下,建立一个extra_packages文件夹,然后在里面新建一个extra_packages.repos文件,内容如下
ok,那就按照它的写法,自己在platformio.ini所在目录下,建立一个extra_packages文件夹,然后在里面新建一个extra_packages.repos文件,内容如下
repositories:
control_msgs:
type: git
url: https://ghproxy.com/https://github.com/ros-controls/control_msgs
version: humble
 修改之后,手动将libmicroros文件夹删除,然后重新编译。
修改之后,手动将libmicroros文件夹删除,然后重新编译。
编译的时候,可能会发生类似这样的错误:
control_msgs clone failed:
fatal: destination path '/home/yong/Desktop/arduino/hello_microros/.pio/libdeps/featheresp32/micro_ros_platformio/build/mcu/src/control_msgs' already exists and is not an empty directory.
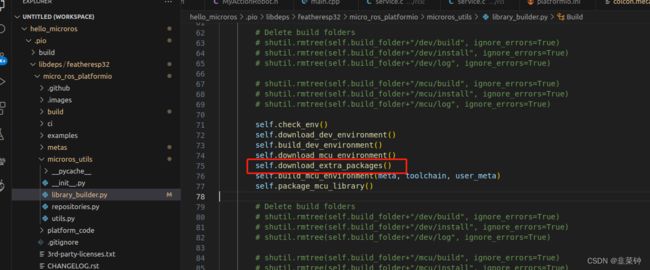
这是因为在原来的 microros_utils/library_builder.py文件中,对extra_packages重复下载了(鱼香ros的:75行,139行;官方的:65行,123行 )。需要删除其中一个才行。针对这个问题,我提交了一个push request:【 Update library_builder.py #105 】
这个错误是鱼香ros这边才有,官方那边是没有的。原因在于第75行这个,与139行重复了。
4.2.方法二
另外分享一个我发现的一个办法吧(不太建议使用,相当于改人家的源代码,不好):
直接修改 repositories.py
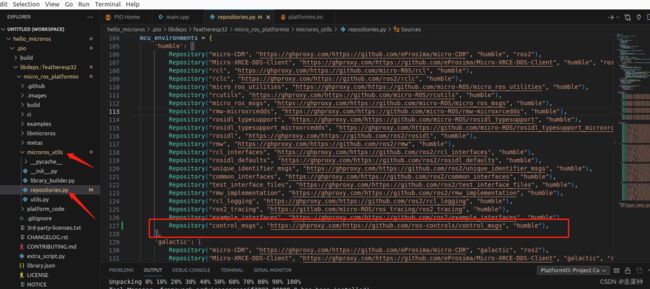
+ Repository("control_msgs", "https://ghproxy.com/https://github.com/ros-controls/control_msgs", "humble"),
注意我目前使用的是鱼香ros的仓库,所以加上的网址是带【https://ghproxy.com/】的(起到加速、梯子的作用),假如你是用官方的,没必要加这个前缀(因为你都能够使用官方的了,应该就不存在墙的问题)。
修改之后,手动将libmicroros文件夹删除,
然后重新编译
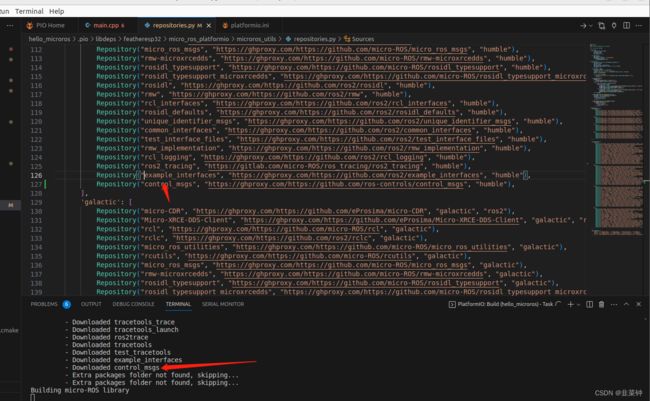
顺利的话,等编译完成后,你就可以看到control_msgs了。

不是很懂为什么官方不直接加进去,难道是出于单片机资源紧张的考虑?
通过对比好像发现,control_msgs是属于第三方团队https://github.com/ros-controls的,并不是ros团队(https://github.com/ros2、https://github.com/micro-ROS)的亲儿子。所以默认没有包含进去?
5.关于moveit_msg的相关问题
moveit_msgs也是第三方的,默认是没有包含的。因此也需要自己加进去
+ Repository("moveit_msgs", "https://ghproxy.com/https://github.com/ros-planning/moveit_msgs", "humble"),
直接加这个还是不得行的,因为它还需要其他的msg
 因此,需要把extra_packages.repos搞成这样(关于extra_packages.repos,请查看本文4.1):
因此,需要把extra_packages.repos搞成这样(关于extra_packages.repos,请查看本文4.1):
repositories:
control_msgs:
type: git
url: https://ghproxy.com/https://github.com/ros-controls/control_msgs
version: humble
object_recognition_msgs:
type: git
url: https://ghproxy.com/https://github.com/wg-perception/object_recognition_msgs
version: ros2
octomap_msgs:
type: git
url: https://ghproxy.com/https://github.com/OctoMap/octomap_msgs
version: ros2
moveit_msgs:
type: git
url: https://ghproxy.com/https://github.com/ros-planning/moveit_msgs
version: humble
需要注意的是,上面的【version】 是填ros2还是填humble要根据人家仓库的分支命名来决定,不能随便填。
然后就有了:

6.publisher以及service不能同时实现的问题
按照教程,假如你想把发布话题、实现服务这两个功能一起放到同一个工程中:
...
// 执行器添加服务
rclc_executor_add_service(&executor, &service, &req, &res, service_callback);
...
// 给执行器添加定时器
rclc_executor_add_timer(&executor, &timer);
...
会发现只能实现其中一个功能,另外一个会被忽略。
这个其实只要改一下执行器的初始化语句就行:
// 创建执行器
- rclc_executor_init(&executor, &support.context, 1, &allocator);
+ rclc_executor_init(&executor, &support.context, 2, &allocator);
也就是把number_of_handles从1改成2.这个参数是控制执行器允许处理的对象数量,可以自己看一下源码。这也是对寸土寸金的单片机的妥协,也没办法,要控制好每一份资源。
7.创建action失败的原因
假如我们直接利用类似以下的代码创建action的话,大概率会返回RCL_RET_ERROR:
...
auto ret = rclc_action_server_init_default(
&mActionServer, node, support,
ROSIDL_GET_ACTION_TYPE_SUPPORT(control_msgs, FollowJointTrajectory),
// "/my_group_controller/follow_joint_trajectory" // 不支持有效字符长度超过29的名字
// "my/follow_joint_trajectory" // 双层也是支持的
"follow_joint_trajectory"
);
if (ret != RCL_RET_OK) {
return 10000 + ret;
// return -1;
}
// microros没有AcceptedCallback ?
ret = rclc_executor_add_action_server(executor, &mActionServer, 1, &mGoalReq, sizeof(mGoalReq),
action_server_handle_goal,
action_server_handle_cancel, nullptr);
if (ret != RCL_RET_OK) {
return 20000 + ret;
// return -2;
}
...
倒不是我们的代码有问题,而是,创建一个action,需要创建好几个service,而能创建的service数量,在编译时microros时已经被限制了,具体请查看:【 Unable to create two servers in micro_ros_platformio #103 】
解决办法是:
 也就是修改colcon.meta、
也就是修改colcon.meta、colcon_lowmem.meta、colcon_verylowmem.meta(因为我不知道它用哪个,所以我全改了) ,改成你觉得合适的数据。然后重新编译。

不过 假如看一下 extra_script.py 这个文件,里面有各个文件的对应。也就是我们改colcon.meta这个文件就行了。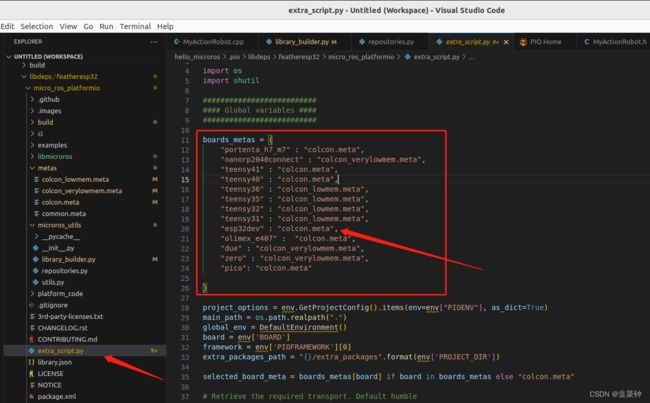
同时也要注意第6点提到的number_of_handles问题。
处理好之后,你的action自然出现了。
8.关于action_name的字符长度被限制在29的问题
8.1 原因分析
本文第7节中的代码提到,action_name不支持有效字符长度超过29的名字。我是怎么知道的?我是一个个字符增加测试出来的。
那为啥是29?
因为创建action时会创建三个service,其中一个名叫xxx/_action/cancel_goal。
但是,查看创建service的init函数,假如你一层一层地查看源代码,会在一个叫 rmw_service.c 的文件中的第60行看到这玩意。
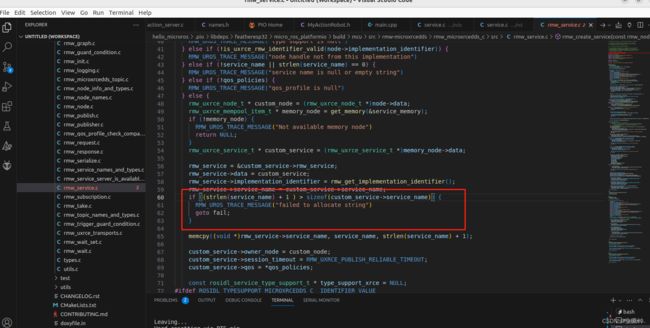 总之就是这句话限制了service_name的长度。
总之就是这句话限制了service_name的长度。
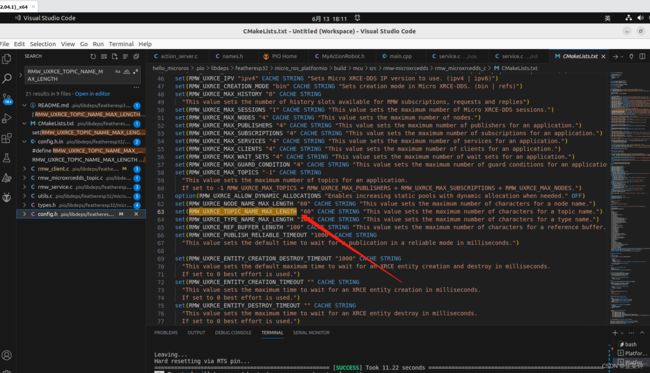
然后再继续深入,知道了这玩意:RMW_UXRCE_TOPIC_NAME_MAX_LENGTH
 这玩意的值为60.
这玩意的值为60.
 那 30 + 19 + 1 = 50,那也没超过啊。。。
那 30 + 19 + 1 = 50,那也没超过啊。。。
哦,漏了一段

继续追查到 expand_topic_name.c ,可以看到,service的最终名字是会混合命名空间、节点名称之类的。我之前的节点名称为【hello_microros】14个字节…好像又超太多了。唉,算了,总之,最终的service_name会比你原来的名字长一段,而且和节点名称、命名空间有关。
 好累。
好累。
8.2.解决办法
通过查找,在 【/home/yong/Desktop/arduino/hello_microros/.pio/libdeps/featheresp32/micro_ros_platformio/build/mcu/src/rmw-microxrcedds/rmw_microxrcedds_c/CMakeLists.txt】 这个文件中出现了可以配置这个宏定义的地方。直接在这里修改肯定不行,因为这个是在编译时才下载下来的。
 办法是回到metas/colcon.meta,修改成这样(修改的数字我暂时只是随意修改的,可能会导致一些未知的错误。但是在新的错误未出现之前,先用着)(已经出现问题了,详细请看10):
办法是回到metas/colcon.meta,修改成这样(修改的数字我暂时只是随意修改的,可能会导致一些未知的错误。但是在新的错误未出现之前,先用着)(已经出现问题了,详细请看10):

{
"names": {
"rmw_microxrcedds": {
"cmake-args": [
"-DRMW_UXRCE_MAX_NODES=10",
"-DRMW_UXRCE_MAX_PUBLISHERS=10",
"-DRMW_UXRCE_MAX_SUBSCRIPTIONS=10",
"-DRMW_UXRCE_MAX_SERVICES=10",
"-DRMW_UXRCE_MAX_CLIENTS=10",
"-DRMW_UXRCE_MAX_HISTORY=10",
"-DRMW_UXRCE_TRANSPORT=custom",
"-DRMW_UXRCE_NODE_NAME_MAX_LENGTH=128",
"-DRMW_UXRCE_TOPIC_NAME_MAX_LENGTH=128",
"-DRMW_UXRCE_TYPE_NAME_MAX_LENGTH=128",
]
},
"microxrcedds_client":{
"cmake-args": [
"-DUCLIENT_CUSTOM_TRANSPORT_MTU=1024",
]
}
}
}
慎重设置上面的 RMW_UXRCE_MAX_NODES,保持1就好了。否则非常耗资源。
编译,运行,长名字的action也就出现了。完美。
 后来发现,别人已经发现过这个问题:【 Long action name does not work for action server #1138 】
后来发现,别人已经发现过这个问题:【 Long action name does not work for action server #1138 】
9.关于代码调试、信息打印
相信很多人都希望micro_ros这边能够类似电脑端直接调用 RCLCPP_INFO() 之类的函数来打印信息、或者获取什么last_error之类来显示函数错误的原因(这一点在我查找实现action初始化失败的原因时深有体会)。
但是,遗憾的是,貌似暂时还没有很好的解决办法,哪怕你修改common.meta里面的
“-DRCUTILS_AVOID_DYNAMIC_ALLOCATION=OFF”,也是不行的(agent直接无法初始化micro_ros,然后单片机不断重启);
目前只能解决printf的问题,办法肯定很多人想到了,就是创建一个string的话题发布者,然后在需要的地方发布信息就行:
'''
// 声明明话题发布者
rcl_publisher_t publisher;
// 声明消息结构体
std_msgs__msg__String pub_msg;
// 缓冲器
char strBuffer[128] = {};
...
// 发布者初始化
rclc_publisher_init_default(
&publisher, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, String),
"microros_log");
...
// 填充自己的消息
sprintf(strBuffer, "robot init ret = %d\r\n", ret);
pub_msg.data.data = strBuffer;
pub_msg.data.size = strlen(strBuffer);
pub_msg.data.capacity = pub_msg.data.size + 1;
...
// 派发消息
rcl_ret_t ret = rcl_publish(&publisher, &pub_msg, NULL);
10.关于action_server无法接收goal的问题
ESP32的资源:
HARDWARE: ESP32 240MHz, 320KB RAM, 4MB Flash
10.1.现象
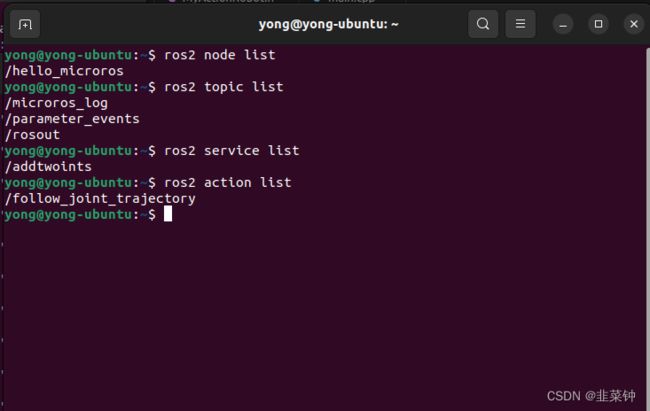
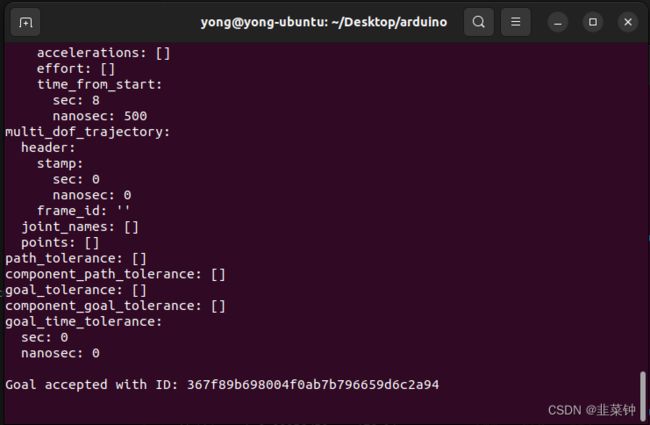
如前面所述,我创建了一个control_msgs/action/FollowJointTrajectory类型的action: follow_joint_trajectory ,然后尝试通过下面的命令从电脑发送指令给esp32
ros2 action send_goal /my_group_controller/follow_joint_trajectory control_msgs/action/FollowJointTrajectory "{
trajectory: {
joint_names: [joint1, joint2, joint3, joint4, joint5],
points: [
{ positions: [0.1, 0.1, 0.1, 0.1, 0.1], time_from_start: { sec: 0, nanosec: 500 } },
{ positions: [0.2, 0.5, 0.2 ,0.2, 0.2], time_from_start: { sec: 5, nanosec: 500 } },
{ positions: [0.3, 0.3, 0.7, -0.5, 0.3], time_from_start: { sec: 7, nanosec: 500 } },
{ positions: [0.4, 0.4, 0.9, 0.4, 0.4], time_from_start: { sec: 8, nanosec: 500 } }
]
}
}"
成功了,但是并没有完全成功。貌似已经发送了出去,但是没有收到返回,而且下位机的回调函数也没有被调用。
10.2.查找资料及分析
看了好几遍代码(参考【 Action server example #1129 】),觉得我的代码应该没啥问题,那到底是怎么回事?
再查找一下资料,发现有人讨论过类似的问题:【 Handling large action request gets failed #1145 】
里面提到RMW_UXRCE_STREAM_HISTORY、timer、超时的问题。
RMW_UXRCE_STREAM_HISTORY,这个参数貌似会影响数据通讯的缓存空间?
不能直接用32,会报错
region `dram0_0_seg’ overflowed by 316440 bytes
 经过一番测试(优化代码、把不必要的东西去掉等等),最后可以只能用8了,这个可能和其他参数设置有关系,最好自己动手试试(但是要注意是要2的n次方,比如4、8、16、32、64等等)。
经过一番测试(优化代码、把不必要的东西去掉等等),最后可以只能用8了,这个可能和其他参数设置有关系,最好自己动手试试(但是要注意是要2的n次方,比如4、8、16、32、64等等)。
此外,还要控制好超时的问题。
10.2.解决方案
总的来说,是因为整个action goal的数据量比较大,一方面留给数据传输缓存的空间要大一点,另外ros的超时时间也要留长一点。也就是空间、时间的问题。
时间方面:减少或者取消loop函数里面的delay、增加rclc_executor_spin_some的超时时间、其它。
其实我们对比一下【 Action server example #1129 】、【 Handling large action request gets failed #1145 】这两篇讨论的代码,就会发现,前一篇对ros_goal_request声明之后,就可以直接拿来用了,而后面一篇还需要用一个函数来申请ros_goal_request的空间:
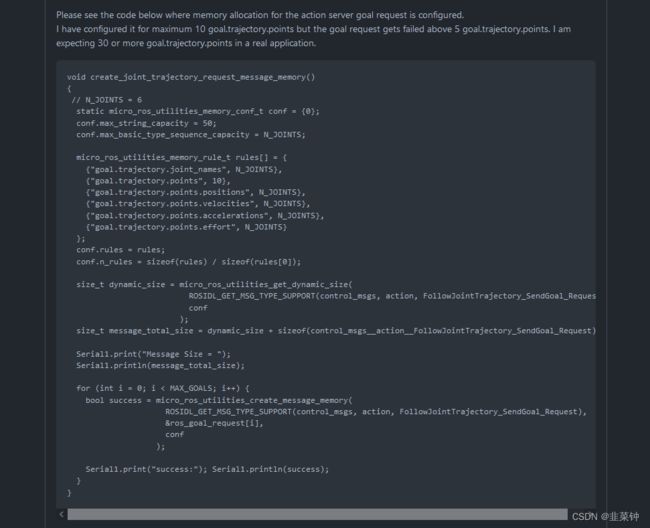
而恰恰就是我没有调用这个函数来初始化,才导致出现了我上面所述的问题。
加上这个函数,就ok了。
另外,这是我目前的colcon.meta:
{
"names": {
"rmw_microxrcedds": {
"cmake-args": [
"-DRMW_UXRCE_MAX_NODES=1",
"-DRMW_UXRCE_MAX_PUBLISHERS=10",
"-DRMW_UXRCE_MAX_SUBSCRIPTIONS=5",
"-DRMW_UXRCE_MAX_SERVICES=6",
"-DRMW_UXRCE_MAX_CLIENTS=1",
"-DRMW_UXRCE_MAX_HISTORY=4",
"-DRMW_UXRCE_TRANSPORT=custom",
"-DRMW_UXRCE_TOPIC_NAME_MAX_LENGTH=100",
"-DRMW_UXRCE_STREAM_HISTORY=8",
]
},
"microxrcedds_client":{
"cmake-args": [
"-DUCLIENT_CUSTOM_TRANSPORT_MTU=1024",
]
}
}
}
为啥有时候需要申请空间,有时候不用呢?
11.关于action_server接收了goal,却无法Goal finished with status: xxx的问题
在按照本文第10小节,操作后,应该是能够发送了goal给下位机,而且下位机的【rclc_action_goal_handle_t】函数也被成功调用了。
但是,假如你在【rclc_executor_add_action_server】时,设置【handles_number】为n的话(并且【ros_goal_request】也正确地申请了空间),那么,反复发送了n次后,就无法再发送了,发送程序就一直卡在那里,不会出现 【Goal accepted with ID: 72718b32773f4a0583cb543b8f33d113】之类的信息。
这是因为没有调用【rclc_action_send_result】来告知系统该goal已经被处理,所以这个goal就一直占用着内存。等你申请的空间被占用完了,那自然无法再继续接收(受)goal了。
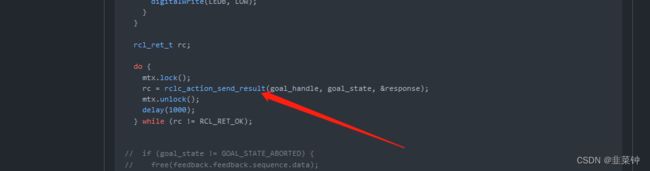 而且这个函数还不是一次调用就会成功,还需要反复调用,直到确认调用成功才行。
而且这个函数还不是一次调用就会成功,还需要反复调用,直到确认调用成功才行。
另外,这个函数也不应该在【rclc_action_goal_handle_t】就调用。在【rclc_action_goal_handle_t】里应该是判断是否接受该goal,接受的话,先记录好,然后返回接受值【RCL_RET_ACTION_GOAL_ACCEPTED】(不接受的话,直接返回【RCL_RET_ACTION_GOAL_REJECTED】,后面吊事都不用处理);接着再在另外的线程、函数中执行电机的操作,然后再返回结果。
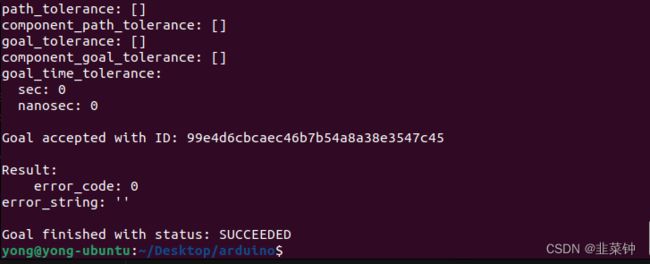
处理好的话,应该是可以得到类似的结果:
RCL_RET_ACTION_GOAL_REJECTED

RCL_RET_ACTION_GOAL_ACCEPTED
总结
在单片机下面操作,一来要先申请空间,再操作;二来真的是1bit、1byte都要考虑清楚。
其他暂时没问题,遇到再补充。